基于越野工況預(yù)測(cè)的混合動(dòng)力履帶車輛能量管理策略
2019-09-11 09:56:40許紹航席軍強(qiáng)陳慧巖
兵工學(xué)報(bào) 2019年8期
關(guān)鍵詞:模型
許紹航, 席軍強(qiáng), 陳慧巖
(北京理工大學(xué) 機(jī)械與車輛學(xué)院, 北京 100081)
0 引言
全電高機(jī)動(dòng)平臺(tái)是未來(lái)軍事機(jī)動(dòng)裝備的重要研究發(fā)展方向,世界各國(guó)都在大力研發(fā)[1]。其中,串聯(lián)式混合動(dòng)力履帶車輛由于其動(dòng)力傳動(dòng)結(jié)構(gòu)簡(jiǎn)單、系統(tǒng)可靠性高等優(yōu)點(diǎn)而受到廣泛關(guān)注。
能量管理策略作為混合動(dòng)力核心技術(shù)之一,對(duì)履帶車輛的動(dòng)力性和燃油經(jīng)濟(jì)性具有顯著影響。文獻(xiàn)[2]針對(duì)履帶式混合動(dòng)力車輛提出了一種發(fā)動(dòng)機(jī)負(fù)載功率跟隨與電池組功率補(bǔ)償?shù)哪芰抗芾聿呗裕瑢?shí)現(xiàn)了車輛機(jī)動(dòng)性和燃油經(jīng)濟(jì)性的良好匹配。文獻(xiàn)[3]基于隨機(jī)動(dòng)態(tài)規(guī)劃策略進(jìn)行履帶車輛能量管理,采用策略迭代法求解以發(fā)動(dòng)機(jī)轉(zhuǎn)速、電池組荷電狀態(tài)、車速和駕駛員功率需求為輸入,發(fā)動(dòng)機(jī)電子節(jié)氣門為輸出的最優(yōu)控制策略,提高了車輛燃油經(jīng)濟(jì)性。近年來(lái),基于模型預(yù)測(cè)控制的能量管理策略受到越來(lái)越多的關(guān)注[4-8],該方法通過(guò)對(duì)未來(lái)工況的合理預(yù)測(cè),使用優(yōu)化方法對(duì)預(yù)測(cè)時(shí)域內(nèi)的能量管理控制問(wèn)題進(jìn)行求解,實(shí)現(xiàn)能量管理的實(shí)時(shí)優(yōu)化。但以上方法缺乏對(duì)越野路況的考慮,對(duì)于越野工況下履帶車輛的能量管理存在一定的應(yīng)用局限性。
本文以某混合動(dòng)力履帶裝甲車輛為研究對(duì)象,在研究混合動(dòng)力能量管理策略時(shí),基于車速和姿態(tài)角建立越野路況識(shí)別模型,對(duì)不同越野路況下的履帶車輛行駛速度進(jìn)行預(yù)測(cè);采用模型預(yù)測(cè)控制策略進(jìn)行能量管理,合理分配動(dòng)力電池與發(fā)動(dòng)機(jī)- 發(fā)電機(jī)組的功率。研究結(jié)果表明,所提出的越野工況預(yù)測(cè)模型有利于改善工況預(yù)測(cè)效果,能量管理策略能夠?qū)崿F(xiàn)越野環(huán)境下履帶車輛能量管理控制目標(biāo),有利于改善混合動(dòng)力履帶車輛性能。
1 越野工況預(yù)測(cè)方法
基于模型預(yù)測(cè)控制的能量管理策略需要對(duì)未來(lái)一段時(shí)間內(nèi)的工況進(jìn)行合理預(yù)測(cè),體現(xiàn)了控制的前瞻性。本文通過(guò)分析和處理試驗(yàn)平臺(tái)的歷史行駛數(shù)據(jù),考慮到不同越野路況下的車速變化特性,在進(jìn)行工況預(yù)測(cè)時(shí)基于車載傳感器采集車速和車輛姿態(tài)角等信息,利用支持向量機(jī)建立越野路況識(shí)別模型,對(duì)不同路況下的速度進(jìn)行預(yù)測(cè),預(yù)測(cè)結(jié)果作為能量管理控制的約束條件。
1.1 越野路況識(shí)別
支持向量機(jī)是路面不平度識(shí)別和地形辨識(shí)的常用方法[9-10],本文利用車載傳感器測(cè)量車速、車輛姿態(tài)角信息,在離線階段基于支持向量機(jī)訓(xùn)練路況識(shí)別模型,實(shí)車使用時(shí)調(diào)用離線訓(xùn)練模型進(jìn)行在線識(shí)別,算法流程圖如圖1所示。
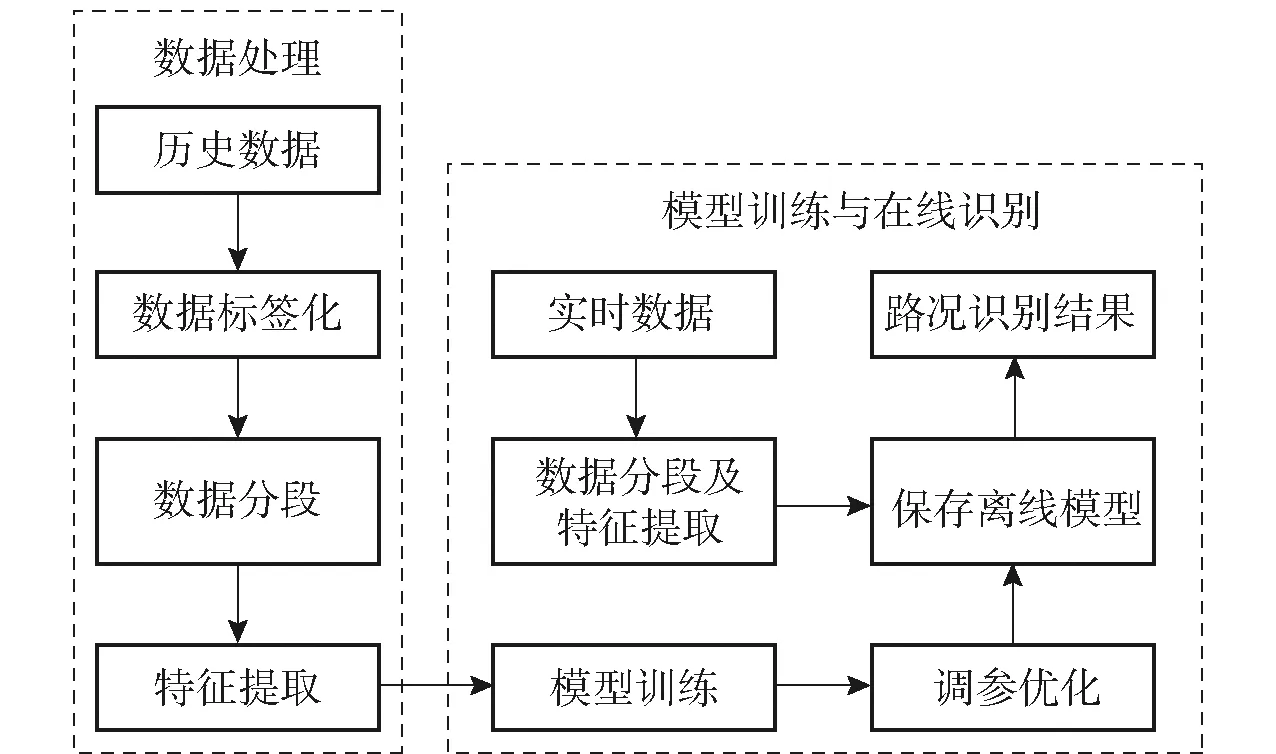
圖1 越野路況識(shí)別算法流程圖Fig.1 Flow chart of cross-country road recognition algorithm
1.1.1 數(shù)據(jù)處理
作為一種有監(jiān)督的機(jī)器學(xué)習(xí)算法,支持向量機(jī)需要對(duì)離線數(shù)據(jù)處理,進(jìn)行數(shù)據(jù)標(biāo)簽化、分段和特征提取,為模型訓(xùn)練提供數(shù)據(jù)集。
1.1.1.1 數(shù)據(jù)標(biāo)簽化
數(shù)據(jù)處理的首要問(wèn)題是數(shù)據(jù)標(biāo)簽化,即對(duì)典型越野路況進(jìn)行分類。
在試驗(yàn)車輛的歷史試驗(yàn)數(shù)據(jù)庫(kù)中選取典型路況下的試驗(yàn)工況,速度曲線如圖2所示,車輛在不同路況下的速度、加速度存在比較大的差異,因此將路況分為平坦、起伏和坡道3類,然后針對(duì)不同路況進(jìn)行速度預(yù)測(cè)。
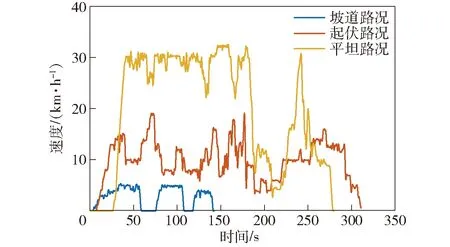
圖2 典型越野路況下的試驗(yàn)速度工況Fig.2 Test speeds under typical off-road conditions
本文對(duì)不同路況下的道路負(fù)荷作一定的簡(jiǎn)化處理,僅考慮中低道路負(fù)荷的情況,根據(jù)文獻(xiàn)[11-13]以及試驗(yàn)平臺(tái)的歷史試驗(yàn)數(shù)據(jù),得出對(duì)應(yīng)路況的道路阻力系數(shù)估計(jì)值如表1所示,典型越野路況下的俯仰角工況如圖3所示。
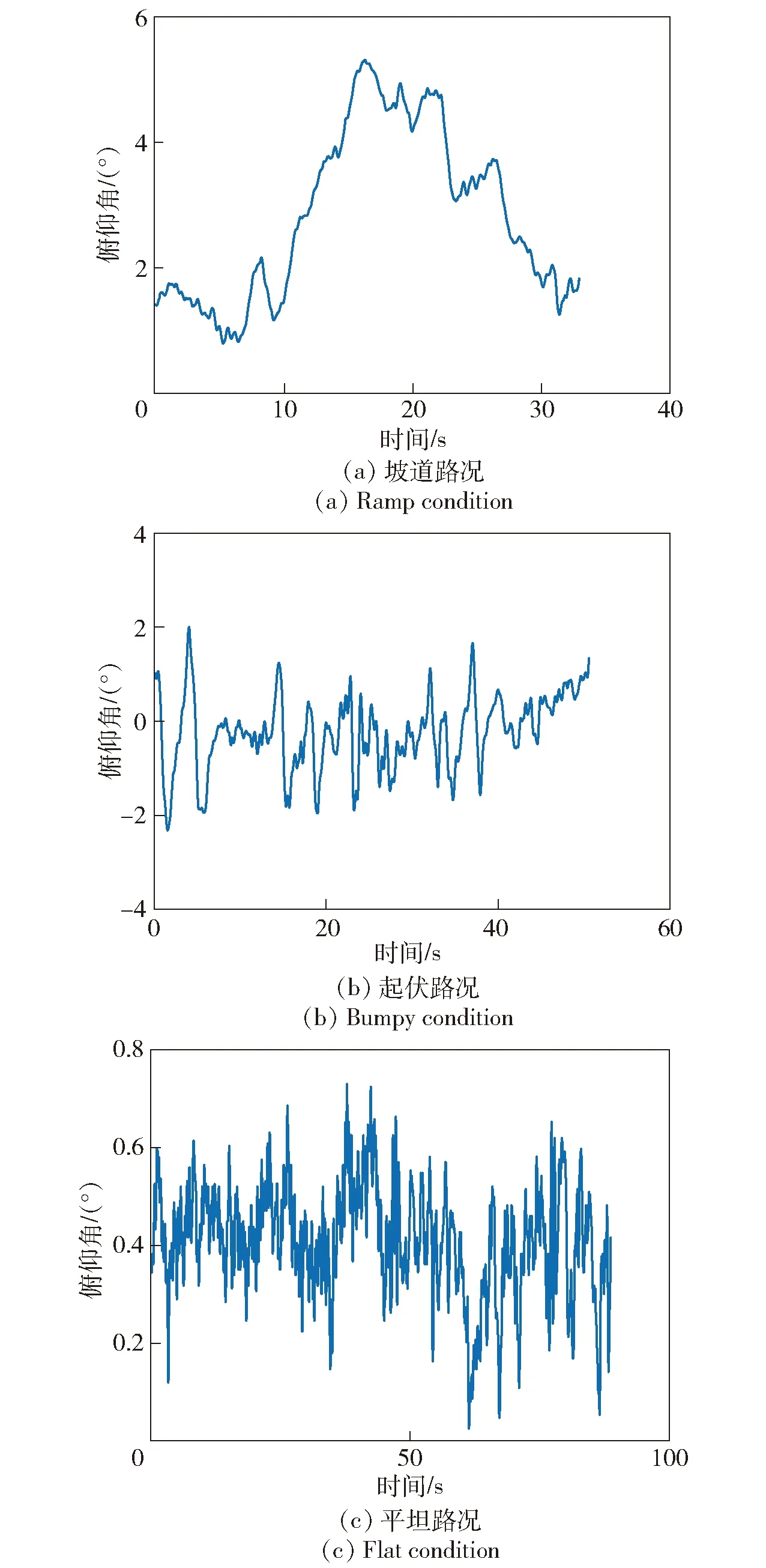
圖3 典型越野路況下的俯仰角工況Fig.3 Pitch angles under typical off-road conditions
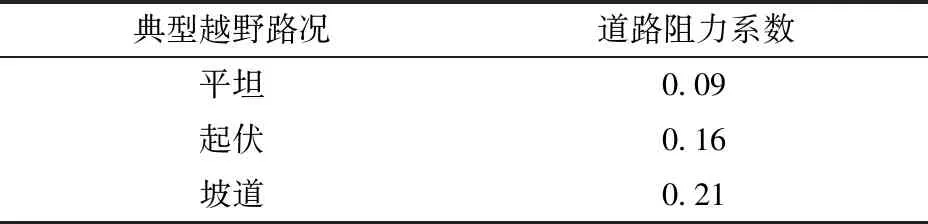
典型越野路況道路阻力系數(shù)平坦0.09起伏0.16坡道0.21
1.1.1.2 數(shù)據(jù)分段與特征提取
數(shù)據(jù)分段是將循環(huán)工況的連續(xù)數(shù)據(jù)按一定的時(shí)間均分為相等長(zhǎng)度的數(shù)據(jù)段,數(shù)據(jù)段時(shí)間的長(zhǎng)短反映了路況識(shí)別的固有延遲時(shí)間。分別采用不同時(shí)間長(zhǎng)度劃分?jǐn)?shù)據(jù)段,然后采用同樣方法訓(xùn)練模型,再用同一組測(cè)試集進(jìn)行測(cè)試,模型識(shí)別的準(zhǔn)確度如表2所示。表2中顯示以1 s劃分?jǐn)?shù)據(jù)段的模型準(zhǔn)確度相對(duì)較高,又考慮到進(jìn)行預(yù)測(cè)能量管理控制的控制周期一般為1 s,因此以1 s為時(shí)間長(zhǎng)度劃分?jǐn)?shù)據(jù)段,在保證模型準(zhǔn)確度的同時(shí),使路況識(shí)別的更新時(shí)間與預(yù)測(cè)控制周期保持一致。
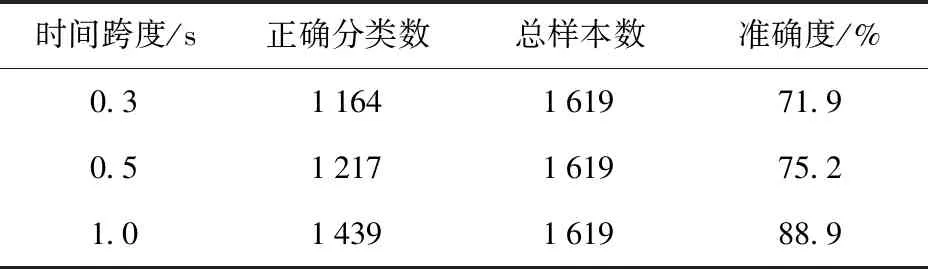
表2 數(shù)據(jù)分段時(shí)間比較
為了區(qū)別各個(gè)路況,需要對(duì)每個(gè)數(shù)據(jù)段內(nèi)的數(shù)據(jù)進(jìn)行處理,提取數(shù)據(jù)段內(nèi)車速和車輛姿態(tài)角的統(tǒng)計(jì)特征,選取的特征參數(shù)如表3所示。
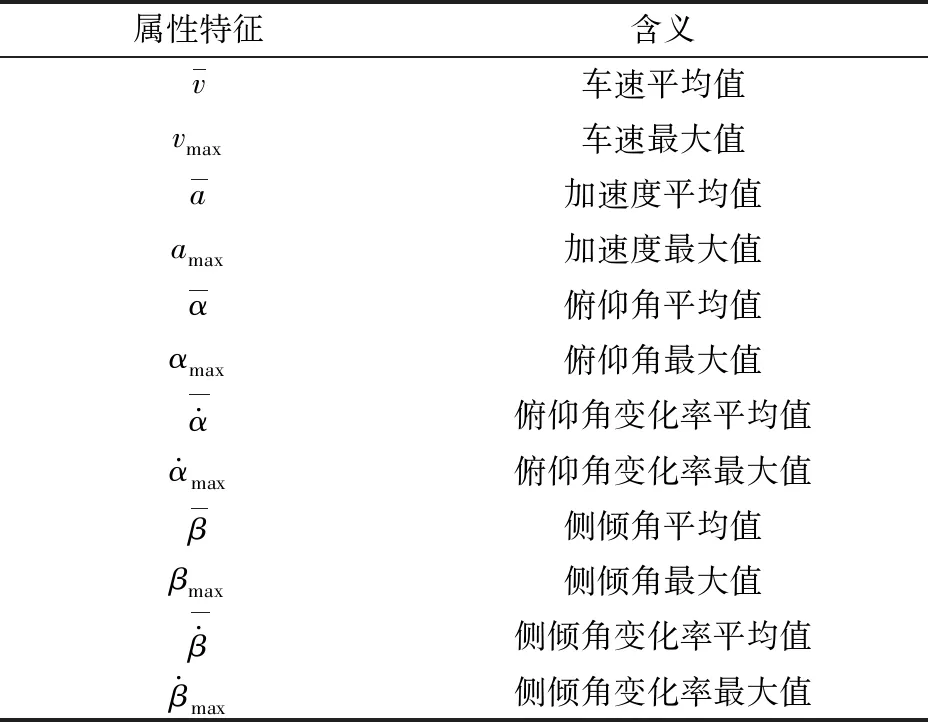
表3 特征提取
1.1.2 模型訓(xùn)練與在線識(shí)別
越野路況識(shí)別模型的建立過(guò)程就是利用支持向量機(jī)訓(xùn)練離線數(shù)據(jù)的過(guò)程。為了使模型具有較高的準(zhǔn)確度,需要對(duì)支持向量機(jī)的核函數(shù)類型及其參數(shù)進(jìn)行合理選擇。常用核函數(shù)有線性、多項(xiàng)式型、徑向基型和Sigmoid型4種,在其他條件相同情況下,分別使用4種核函數(shù)訓(xùn)練模型,模型識(shí)別的準(zhǔn)確度如表4所示,通過(guò)對(duì)比分析,選擇準(zhǔn)確率更高、迭代次數(shù)更少的徑向基類型函數(shù)作為核函數(shù)進(jìn)行模型訓(xùn)練。
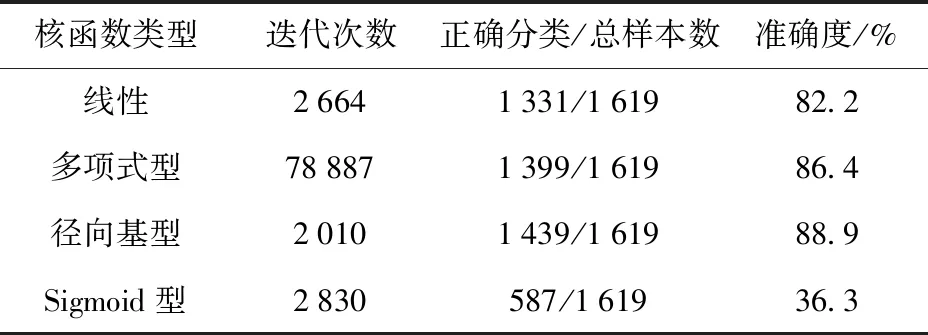
表4 核函數(shù)類型比較
支持向量機(jī)參數(shù)類型有懲罰因子C和核函數(shù)參數(shù)γ,將兩個(gè)參數(shù)在[0.01,100]范圍內(nèi)進(jìn)行對(duì)比選取,得出適合路況分類問(wèn)題的參數(shù)選取方案,調(diào)參過(guò)程的部分曲線如圖4所示,調(diào)參優(yōu)化結(jié)果為C=1,γ=0.02.
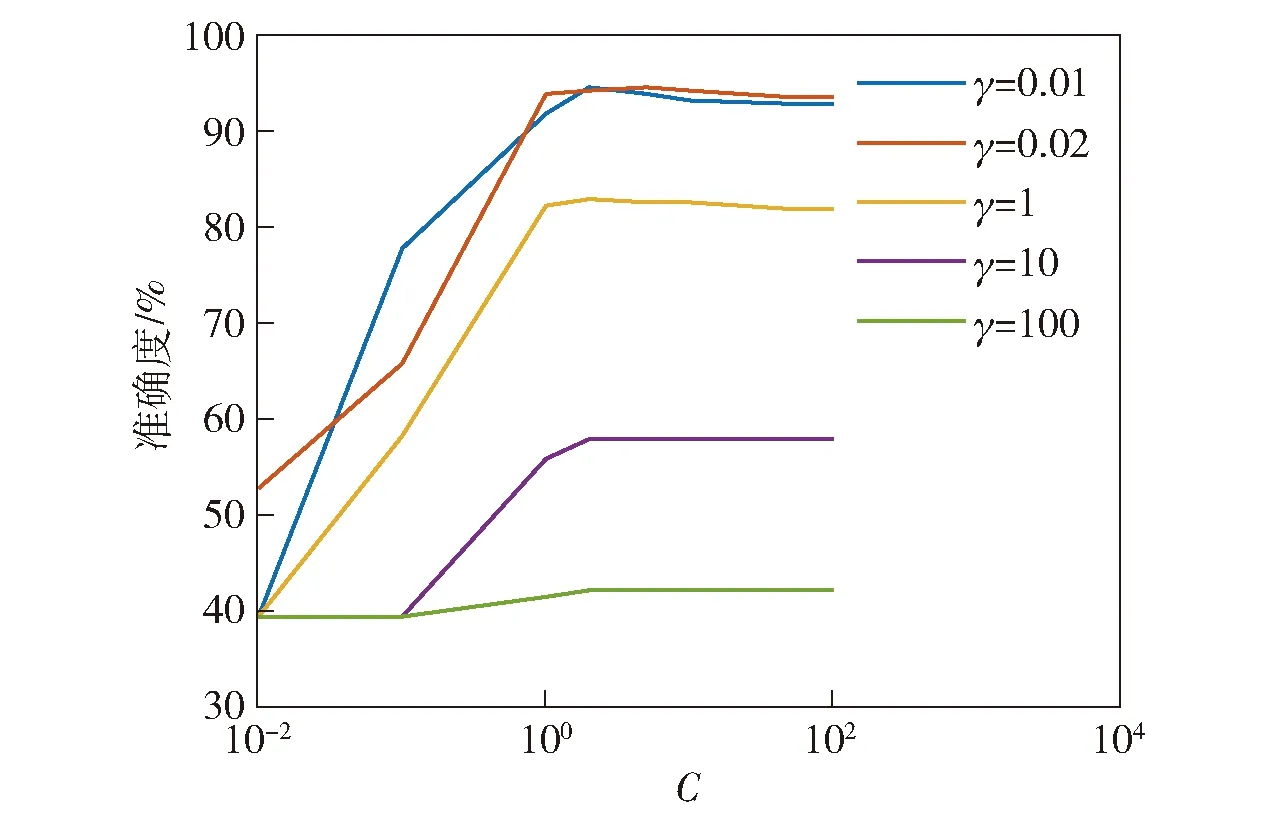
圖4 模型調(diào)參曲線Fig.4 Parametric adjustment of model
將離線訓(xùn)練的模型保存至控制器,在線識(shí)別時(shí),控制器接收傳感器發(fā)送的車速、車輛姿態(tài)等信息后按表3提取特征,調(diào)用離線模型進(jìn)行在線路況識(shí)別。
1.2 履帶速度預(yù)測(cè)
車輛在行駛過(guò)程中,速度變化存在很大的不確定性。假設(shè)車輛加速度與歷史狀態(tài)無(wú)關(guān),僅與當(dāng)前狀態(tài)有關(guān),則可以將加速度變化視為馬爾可夫過(guò)程,使用馬爾可夫鏈進(jìn)行速度預(yù)測(cè)[3]。履帶車輛存在速差轉(zhuǎn)向的運(yùn)動(dòng)特點(diǎn),雙側(cè)電驅(qū)動(dòng)履帶車輛可通過(guò)控制兩側(cè)驅(qū)動(dòng)電機(jī)實(shí)現(xiàn)任意半徑轉(zhuǎn)向。本文在進(jìn)行速度預(yù)測(cè)時(shí),分別計(jì)算不同路況下兩側(cè)履帶速度的狀態(tài)轉(zhuǎn)移概率,單獨(dú)預(yù)測(cè)每側(cè)履帶的速度。
將履帶速度和加速度離散化,得到對(duì)應(yīng)下標(biāo)的速度值和加速度值:
v∈{v1,v2,…,vr};a∈{a1,a2,…,aq},
式中:r、q分別為速度和加速度最大索引下標(biāo)。馬爾可夫狀態(tài)轉(zhuǎn)移概率為
pij=P(a(n+1)=aj|v(n)=vi),
(1)
式中:a(n+1)為第n+1時(shí)刻的加速度;v(n)為第n時(shí)刻的履帶速度預(yù)測(cè)值;i、j分別為離散化的速度和加速度索引下標(biāo),i=1,2,…,r,j=1,2,…,q.
(1)式的含義為:當(dāng)n時(shí)刻履帶速度為vi時(shí),n+1時(shí)刻加速度為aj的概率為pij.
對(duì)歷史試驗(yàn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì),計(jì)算狀態(tài)轉(zhuǎn)移概率pij為
(2)
式中:Ni,j為當(dāng)前時(shí)刻速度為vi、下一時(shí)刻加速度為aj事件發(fā)生的次數(shù);Ni為事件發(fā)生的總次數(shù)。
在離線階段分別統(tǒng)計(jì)平坦、起伏和坡道路況的歷史試驗(yàn)數(shù)據(jù),分別得到各路況下的履帶速度狀態(tài)轉(zhuǎn)移概率pij,平坦路況下左側(cè)履帶馬爾可夫轉(zhuǎn)移概率矩陣如圖5所示。為使?fàn)顟B(tài)轉(zhuǎn)移概率實(shí)時(shí)更新,引入修正系數(shù)λ,當(dāng)前時(shí)刻為n時(shí),若前一時(shí)刻發(fā)生了速度vi向加速度aj的轉(zhuǎn)移事件,則對(duì)狀態(tài)轉(zhuǎn)移概率進(jìn)行更新:
pij(n)=pij(n-1)+λ,
(3)
(4)
式中:s=1,2,…,q,s≠j.
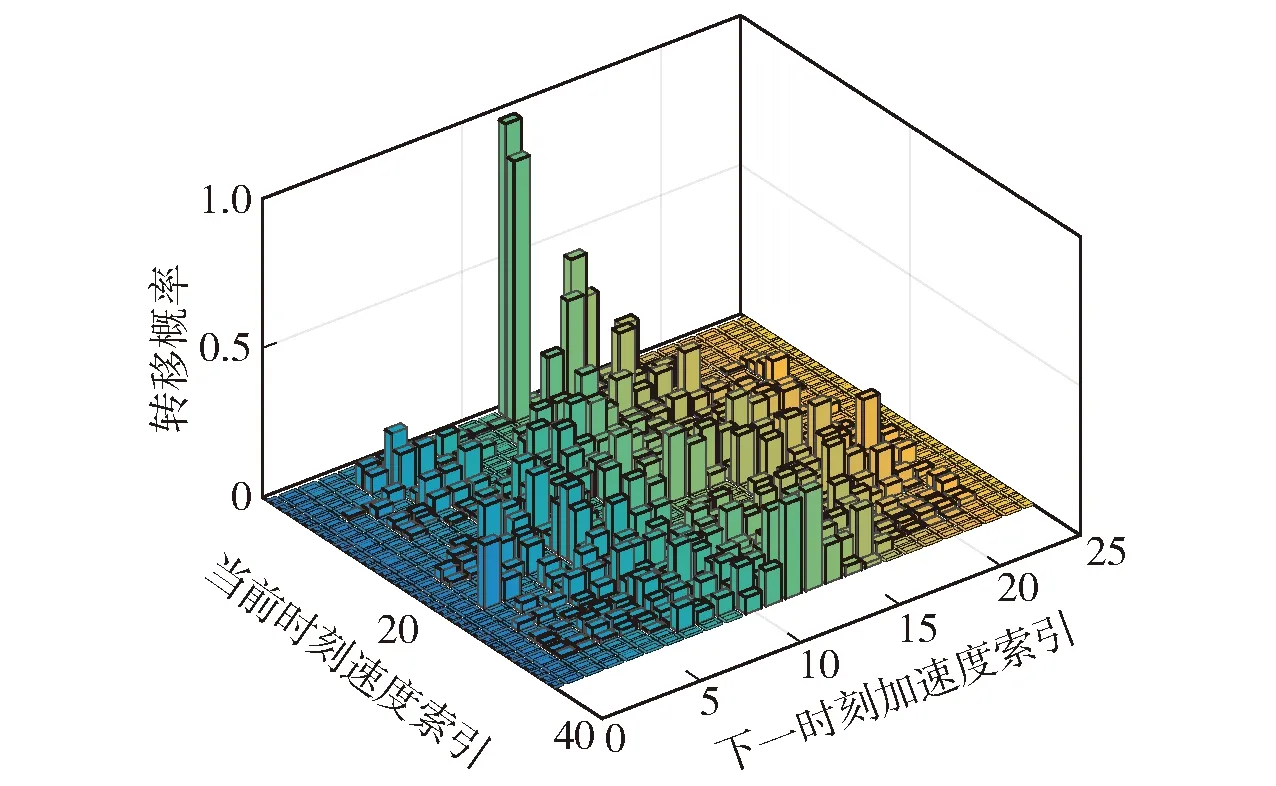
圖5 平坦路況下左側(cè)履帶的馬爾可夫轉(zhuǎn)移概率矩陣Fig.5 Markov transition probability matrix of left track on flat road
下一時(shí)刻履帶速度預(yù)測(cè)值為
(5)
式中:v(n+1)為下一時(shí)刻的履帶速度預(yù)測(cè)值;Δt為時(shí)間間隔。
預(yù)測(cè)時(shí)域內(nèi)各個(gè)時(shí)刻的履帶速度均可由上一時(shí)刻的預(yù)測(cè)值得到:
(6)
式中:k為預(yù)測(cè)時(shí)域內(nèi)的目標(biāo)時(shí)刻。
2 基于越野工況預(yù)測(cè)的能量管理策略
2.1 系統(tǒng)分析
本文研究的混合動(dòng)力履帶車輛采用串聯(lián)式結(jié)構(gòu),如圖6所示,雙側(cè)驅(qū)動(dòng)電機(jī)通過(guò)減速機(jī)構(gòu)帶動(dòng)兩側(cè)主動(dòng)輪和履帶轉(zhuǎn)動(dòng),實(shí)現(xiàn)車輛的直駛和轉(zhuǎn)向;發(fā)動(dòng)機(jī)- 發(fā)電機(jī)組和動(dòng)力電池組混合供電,車輛行駛的直接驅(qū)動(dòng)力完全來(lái)自驅(qū)動(dòng)電機(jī),發(fā)動(dòng)機(jī)動(dòng)力不直接驅(qū)動(dòng)車輛,實(shí)現(xiàn)了工作點(diǎn)的解耦。
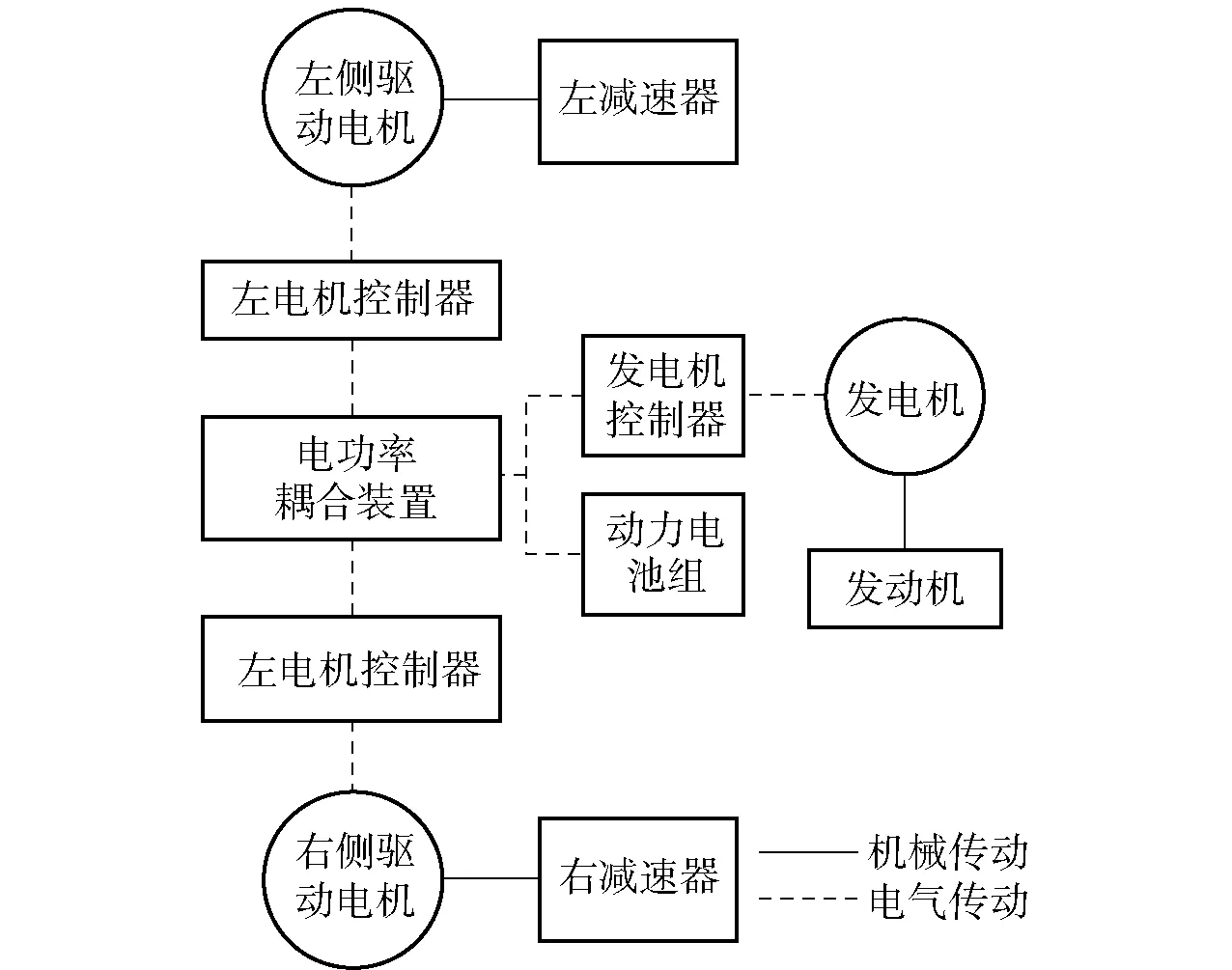
圖6 混合動(dòng)力傳動(dòng)系統(tǒng)原理圖Fig.6 Schematic diagram of power transmission system for hybrid tracked vehicle
混合動(dòng)力履帶車輛能量管理的控制目標(biāo)是在滿足動(dòng)力性功率需求和系統(tǒng)約束條件下,對(duì)發(fā)動(dòng)機(jī)- 發(fā)電機(jī)組和動(dòng)力電池組的功率進(jìn)行合理分配,將動(dòng)力電池組荷電狀態(tài)(SOC)維持在一定的區(qū)間,并降低燃油消耗,提高燃油經(jīng)濟(jì)性。
2.2 面向能量管理的混合動(dòng)力履帶車輛建模
動(dòng)力電池組是混合動(dòng)力系統(tǒng)的關(guān)鍵部件,其SOC值對(duì)于能量管理控制起著至關(guān)重要的作用,使用等效電路模型對(duì)動(dòng)力電池建模:
(7)
式中:Cb為電池額定容量;Vb為電池開(kāi)路電壓;Rb為電池內(nèi)阻;Pb為電池功率。
系統(tǒng)選用具有電子調(diào)速功能的發(fā)動(dòng)機(jī),發(fā)動(dòng)機(jī)采用轉(zhuǎn)速控制方式,能量管理控制器通過(guò)CAN網(wǎng)向發(fā)動(dòng)機(jī)控制器發(fā)送轉(zhuǎn)速請(qǐng)求指令,根據(jù)臺(tái)架試驗(yàn)建立的油耗特性圖計(jì)算燃油消耗率:
(8)
式中:φf(shuō)為根據(jù)臺(tái)架試驗(yàn)數(shù)據(jù)確定的發(fā)動(dòng)機(jī)油耗特性圖查表函數(shù);Te為發(fā)動(dòng)機(jī)轉(zhuǎn)矩;ne為發(fā)動(dòng)機(jī)轉(zhuǎn)速。
發(fā)動(dòng)機(jī)輸出軸與發(fā)電機(jī)輸入軸剛性連接,二者的轉(zhuǎn)速相等,發(fā)電機(jī)輸出功率滿足如下方程:
(9)
式中:ng和Tg分別為發(fā)電機(jī)輸入軸轉(zhuǎn)速和轉(zhuǎn)矩;Je和Jg分別為發(fā)動(dòng)機(jī)和發(fā)電機(jī)的轉(zhuǎn)動(dòng)慣量;Pg為發(fā)電機(jī)輸出到直流母線的電功率;ηg為發(fā)電機(jī)效率。
發(fā)動(dòng)機(jī)- 發(fā)電機(jī)組和動(dòng)力電池組共同提供能量,滿足整車功率需求,功率平衡方程為
(Pg+Pb)η=Pr,
(10)
式中:Pr為車輛需求功率;η為電功率轉(zhuǎn)換效率。
混合動(dòng)力履帶車輛的功率需求來(lái)自于兩部分,一是驅(qū)動(dòng)系統(tǒng)的動(dòng)力功率需求,二是冷卻水泵等電氣輔助設(shè)備的功率需求:
(11)

本文對(duì)履帶車輛動(dòng)力學(xué)進(jìn)行一定簡(jiǎn)化,忽略履帶的滑轉(zhuǎn)、滑移,將履帶車輛視為具有集中質(zhì)量作平面運(yùn)動(dòng)的剛體,速差轉(zhuǎn)向過(guò)程視為低速勻速運(yùn)動(dòng),按(12)式計(jì)算履帶車輛直駛和轉(zhuǎn)向需求功率[8]:
(12)
式中:fd為道路阻力系數(shù),由當(dāng)前路況確定;m為車輛總質(zhì)量;g為重力加速度;Ca為空氣阻力系數(shù);A為履帶車輛的正面投影面積;ac為加速度;vc為車速;μ為轉(zhuǎn)向阻力系數(shù);L為履帶接地長(zhǎng)度;ω為轉(zhuǎn)向角速度;vL、vR分別為左、右兩側(cè)履帶速度;B為履帶中心距。
2.3 基于越野工況預(yù)測(cè)的能量管理策略
模型預(yù)測(cè)控制是解決非線性、強(qiáng)約束問(wèn)題的有力工具,其核心是通過(guò)對(duì)未來(lái)狀態(tài)的合理預(yù)測(cè),求解預(yù)測(cè)時(shí)域內(nèi)的優(yōu)化控制問(wèn)題,但僅將最優(yōu)控制序列中的第1個(gè)控制量作用于系統(tǒng),然后重新開(kāi)始下一個(gè)預(yù)測(cè)控制循環(huán)[14]。針對(duì)2.2節(jié)提出的混合動(dòng)力履帶車輛模型,根據(jù)越野工況預(yù)測(cè)結(jié)果利用模型預(yù)測(cè)控制策略進(jìn)行能量管理,實(shí)時(shí)優(yōu)化發(fā)動(dòng)機(jī)發(fā)電機(jī)組和動(dòng)力電池組的功率分配。對(duì)于混合動(dòng)力履帶車輛,能量管理的控制量為發(fā)動(dòng)機(jī)轉(zhuǎn)速ne和發(fā)電機(jī)轉(zhuǎn)矩Tg,系統(tǒng)狀態(tài)量為動(dòng)力電池SOC,狀態(tài)方程根據(jù)(6)式可寫為

(13)
在每個(gè)采樣時(shí)刻k、預(yù)測(cè)時(shí)域P內(nèi)的能量管理優(yōu)化函數(shù)為
(14)

能量管理控制系統(tǒng)在每個(gè)預(yù)測(cè)時(shí)域內(nèi)需要滿足如下物理約束:
(15)
式中:參數(shù)下標(biāo)max和min分別為對(duì)應(yīng)物理量的最大值和最小值。
能量管理算法流程圖如圖7所示,系統(tǒng)在每個(gè)采樣時(shí)刻對(duì)當(dāng)前狀態(tài)進(jìn)行更新,并對(duì)預(yù)測(cè)時(shí)域內(nèi)的工況進(jìn)行預(yù)測(cè),構(gòu)建能量管理優(yōu)化問(wèn)題;采用動(dòng)態(tài)規(guī)劃算法對(duì)預(yù)測(cè)時(shí)域內(nèi)的能量管理優(yōu)化問(wèn)題進(jìn)行在線求解,獲得預(yù)測(cè)時(shí)域內(nèi)的最優(yōu)控制序列,將第1個(gè)控制量作用于系統(tǒng),完成本次預(yù)測(cè)控制循環(huán),并重新觀測(cè)系統(tǒng)狀態(tài),開(kāi)啟下一個(gè)控制循環(huán)。
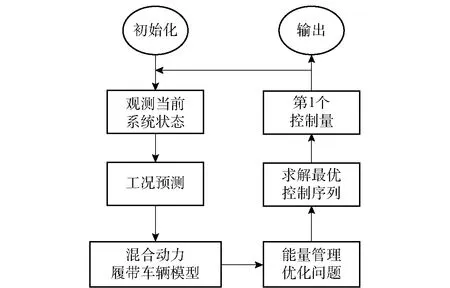
圖7 能量管理算法流程圖Fig.7 Flow chart of energy management algorithm
3 仿真實(shí)驗(yàn)結(jié)果與分析
本文基于某混合動(dòng)力履帶車輛實(shí)驗(yàn)平臺(tái),在前期大量實(shí)驗(yàn)數(shù)據(jù)的基礎(chǔ)上,采用第2節(jié)方法訓(xùn)練了越野工況預(yù)測(cè)模型以進(jìn)行預(yù)測(cè)能量管理。實(shí)驗(yàn)平臺(tái)和典型實(shí)驗(yàn)路況如圖8所示。為進(jìn)一步分析越野工況預(yù)測(cè)效果和能量管理控制效果,驗(yàn)證本文提出的基于越野工況預(yù)測(cè)的能量管理策略的可行性與有效性,基于實(shí)車實(shí)驗(yàn)工況在MATLAB環(huán)境下進(jìn)行了仿真實(shí)驗(yàn)。根據(jù)動(dòng)力電池組的使用要求,混合動(dòng)力模式下電池SOC最佳范圍為0.6~0.8,因此將電池SOC初始值和目標(biāo)值設(shè)置為0.7,仿真時(shí)長(zhǎng)385 s,整車主要技術(shù)參數(shù)如表5所示。
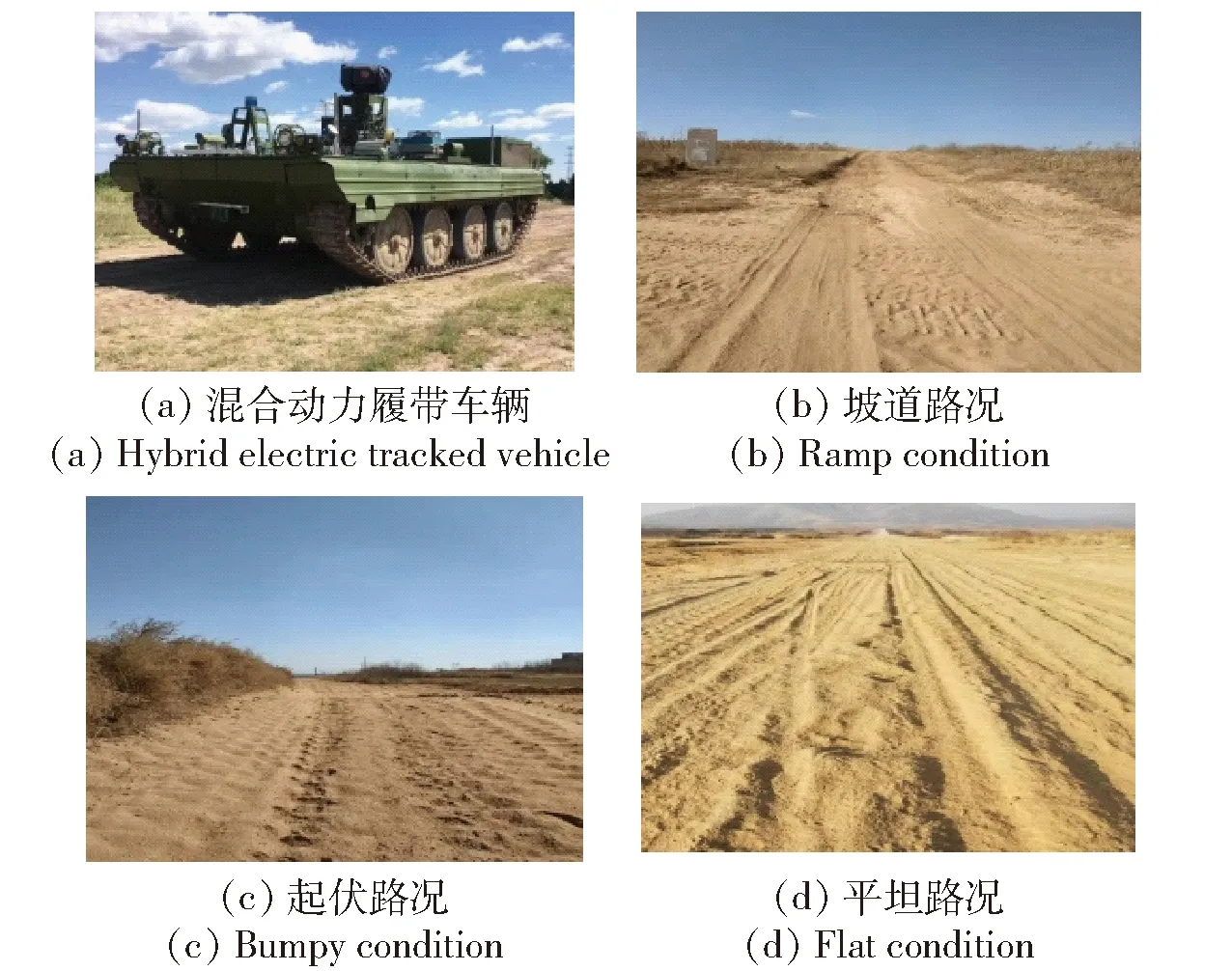
圖8 實(shí)驗(yàn)平臺(tái)及典型路況Fig.8 Hybrid electric tracked vehicle and test road conditions
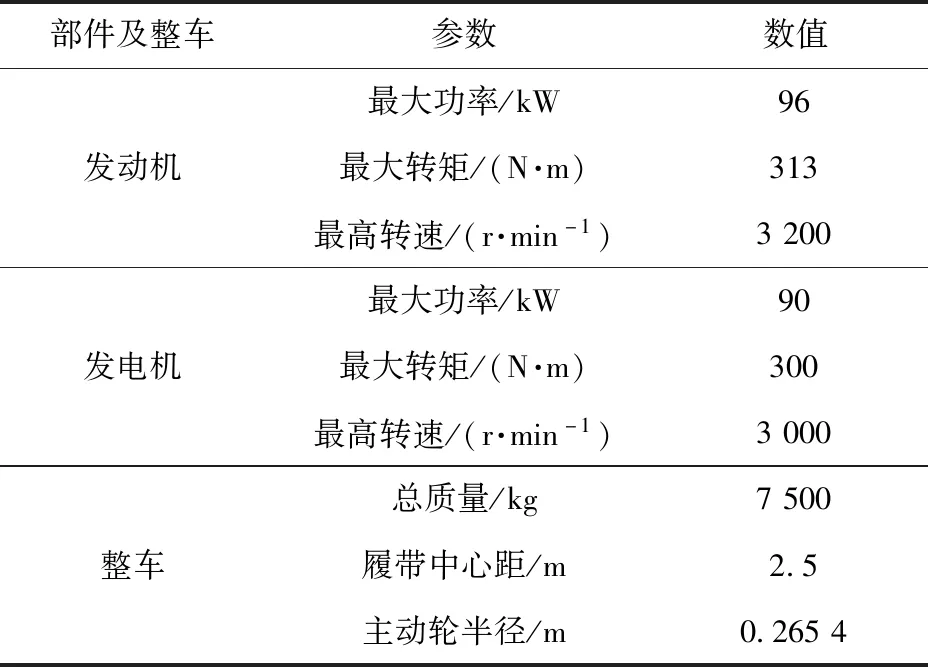
部件及整車參數(shù)數(shù)值最大功率/kW96發(fā)動(dòng)機(jī)最大轉(zhuǎn)矩/(N·m)313最高轉(zhuǎn)速/(r·min-1)3200最大功率/kW90發(fā)電機(jī)最大轉(zhuǎn)矩/(N·m)300最高轉(zhuǎn)速/(r·min-1)3000總質(zhì)量/kg7500整車履帶中心距/m2.5主動(dòng)輪半徑/m0.2654
3.1 越野工況預(yù)測(cè)效果分析
仿真實(shí)驗(yàn)工況的俯仰角曲線如圖9所示,實(shí)驗(yàn)工況的數(shù)據(jù)段共385個(gè),路況識(shí)別正確的數(shù)據(jù)段為347個(gè),準(zhǔn)確度為90.16%. 錯(cuò)誤分類多發(fā)生于將起伏路面識(shí)別為坡道路面,這是因?yàn)閷?shí)驗(yàn)平臺(tái)在起伏面上的部分行駛數(shù)據(jù)特征與坡道路面相似,從而出現(xiàn)少量誤檢。越野路況識(shí)別結(jié)果與實(shí)際路況對(duì)比如圖10所示。
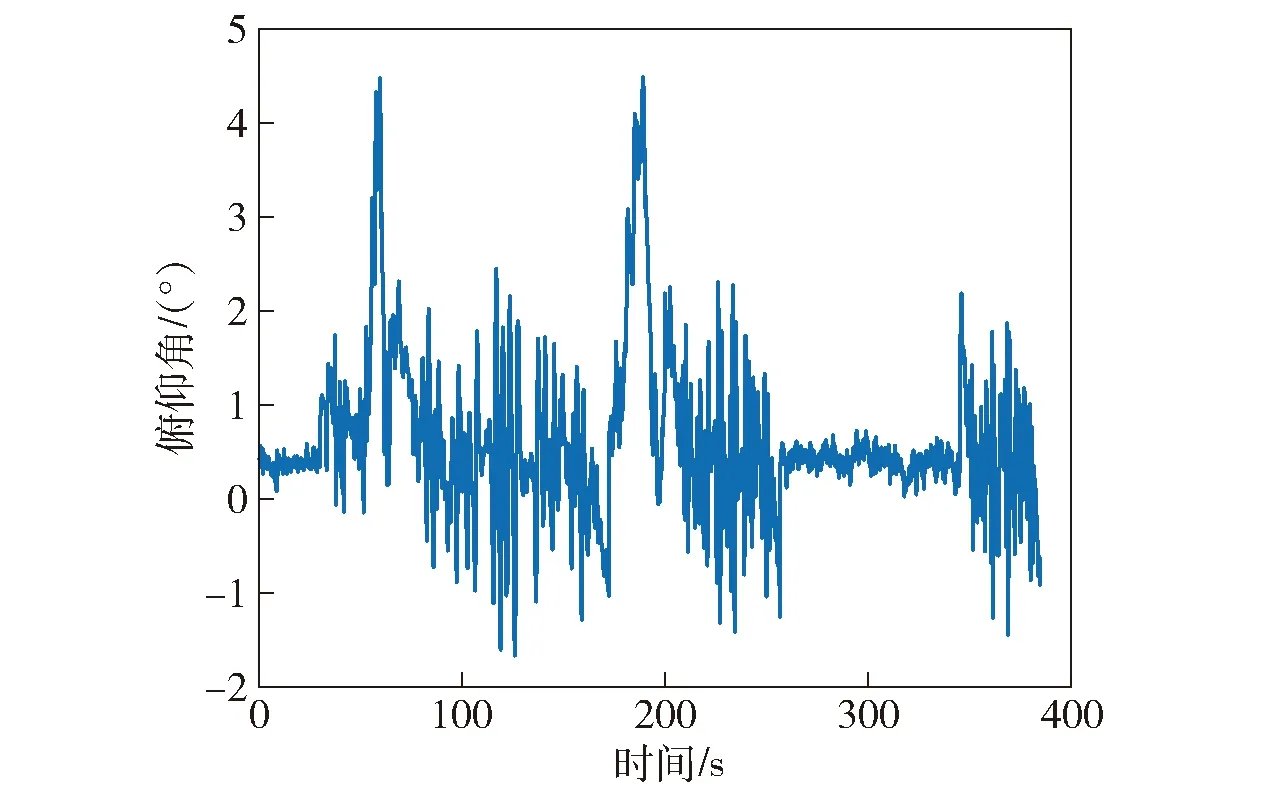
圖9 仿真實(shí)驗(yàn)工況的車輛俯仰角Fig.9 Vehicle pitch curve under simulation test condition
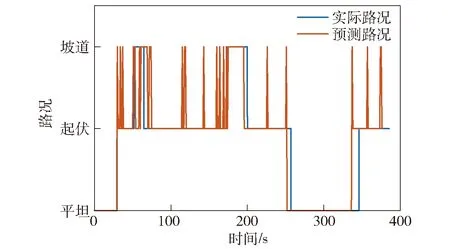
圖10 越野路況識(shí)別結(jié)果Fig.10 Recognition result of off-road condition
速度預(yù)測(cè)效果如圖11所示,可見(jiàn)基于路況識(shí)別的速度預(yù)測(cè)可以較準(zhǔn)確地對(duì)越野速度工況進(jìn)行預(yù)測(cè)。為進(jìn)一步表明預(yù)測(cè)效果,分別使用不同的預(yù)測(cè)方法進(jìn)行預(yù)測(cè),引入均方根誤差作為評(píng)價(jià)指標(biāo),如(15)式所示,對(duì)不同的預(yù)測(cè)方法的預(yù)測(cè)效果進(jìn)行對(duì)比。
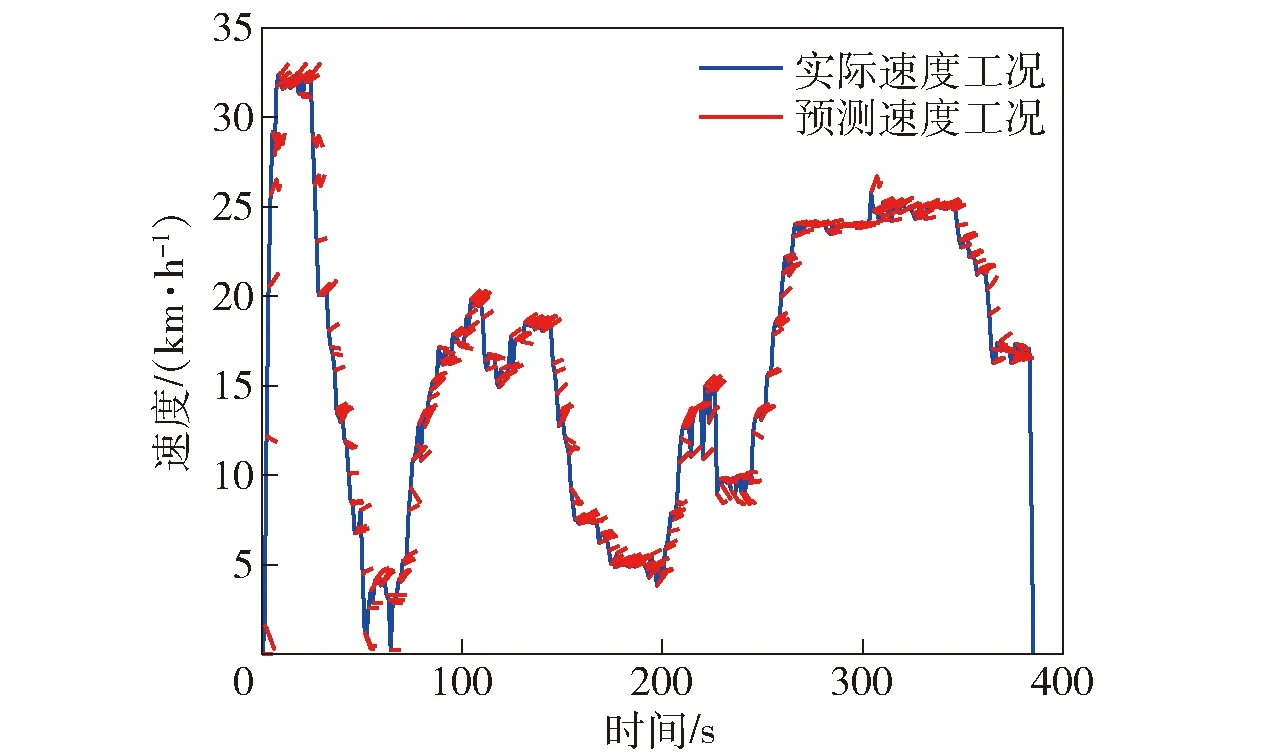
圖11 速度預(yù)測(cè)結(jié)果Fig.11 Predicted speeds
(16)
式中:e為均方根誤差;vp和vr分別為預(yù)測(cè)速度和實(shí)際速度。
表6顯示了不同預(yù)測(cè)方法的預(yù)測(cè)結(jié)果,其中:維持預(yù)測(cè)是指將每一個(gè)預(yù)測(cè)時(shí)域內(nèi)的速度均視為當(dāng)前時(shí)刻的速度;馬爾可夫預(yù)測(cè)是指將所有路況的速度工況進(jìn)行統(tǒng)計(jì),統(tǒng)一使用相同的轉(zhuǎn)移概率進(jìn)行預(yù)測(cè);越野工況預(yù)測(cè)策略是指對(duì)路況進(jìn)行區(qū)分,根據(jù)越野路況識(shí)別的結(jié)果分別對(duì)不同路況使用不同的轉(zhuǎn)移概率進(jìn)行預(yù)測(cè),結(jié)果可見(jiàn)越野工況預(yù)測(cè)有利于提高預(yù)測(cè)的準(zhǔn)確度,準(zhǔn)確度提升約18.6%.
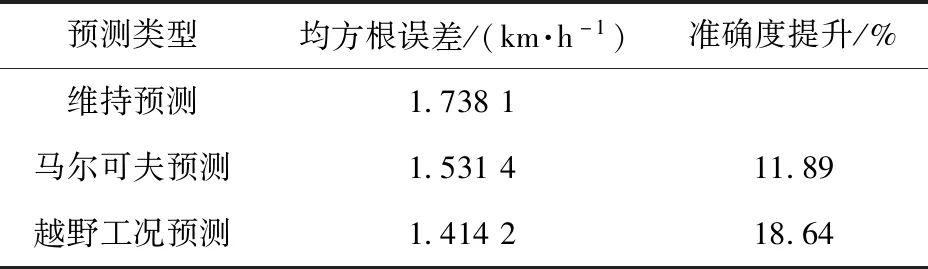
表6 速度預(yù)測(cè)效果對(duì)比
3.2 能量管理控制效果分析
基于越野工況預(yù)測(cè)結(jié)果和混合動(dòng)力履帶車輛模型,使用模型預(yù)測(cè)控制策略進(jìn)行能量管理,電池SOC仿真結(jié)果如圖12所示,在行駛工況中,能量管理策略在保證滿足整車功率平衡的基礎(chǔ)上,通過(guò)動(dòng)力電池的充放電,調(diào)節(jié)發(fā)動(dòng)機(jī)- 發(fā)電機(jī)組的輸出功率以改善燃油經(jīng)濟(jì)性,同時(shí)能夠?qū)OC維持在目標(biāo)值范圍附近,較好地完成能量管理的控制目標(biāo)。
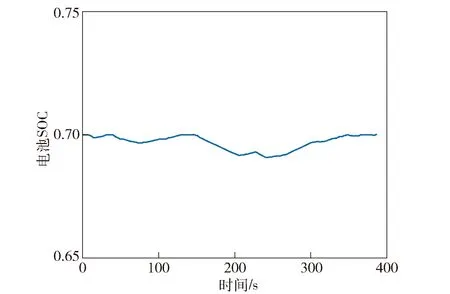
圖12 電池SOC仿真曲線Fig.12 Simulation curve of battery SOC
為了比較不同控制策略在實(shí)驗(yàn)工況下的能量管理效果,分別采用基于規(guī)則的策略和基于越野工況預(yù)測(cè)的策略進(jìn)行能量管理。圖13比較了不同策略下發(fā)動(dòng)機(jī)工作點(diǎn)的分布。由圖13可見(jiàn),與基于規(guī)則的控制策略相比,發(fā)動(dòng)機(jī)有更多的工作點(diǎn)落在高效區(qū)內(nèi),工作范圍得到改善。基于規(guī)則的策略下總油耗為993.5 g,而基于越野工況預(yù)測(cè)的策略下總油耗為920.1 g,燃油經(jīng)濟(jì)性提高了7.9%.
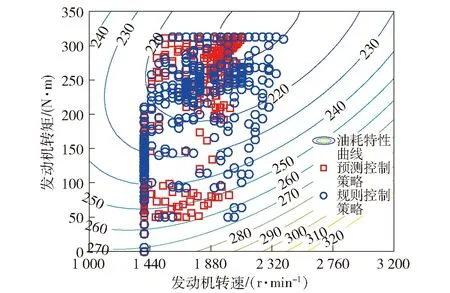
圖13 不同策略下發(fā)動(dòng)機(jī)工作點(diǎn)對(duì)比Fig.13 Comparison of engine operating points when using different control strategies
4 結(jié)論
本文針對(duì)越野環(huán)境下混合動(dòng)力履帶車輛能量管理問(wèn)題,提出了一種基于越野工況預(yù)測(cè)的履帶車輛能量管理策略。首先利用車速、車輛姿態(tài)角建立越野路況識(shí)別模型,然后基于馬爾可夫鏈對(duì)預(yù)測(cè)時(shí)域內(nèi)不同路況下的速度進(jìn)行預(yù)測(cè),最后建立混合動(dòng)力履帶車輛模型,以滿足整車功率平衡和燃油消耗最小為目標(biāo),設(shè)計(jì)模型預(yù)測(cè)控制策略進(jìn)行能量管理。
通過(guò)仿真實(shí)驗(yàn),驗(yàn)證了越野工況預(yù)測(cè)策略有利于提高預(yù)測(cè)效果,預(yù)測(cè)準(zhǔn)確度提升約19%,同時(shí)也驗(yàn)證了能量管理策略能夠完成越野環(huán)境下履帶車輛能量管理控制目標(biāo),有利于改善混合動(dòng)力履帶車輛性能, 與規(guī)則策略相比油耗降低約8%.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 兵工學(xué)報(bào)的其它文章
- 基于聲信息的勻加速目標(biāo)快速目標(biāo)運(yùn)動(dòng)分析解算
- 軍事協(xié)同巡檢路線優(yōu)化策略
- 基于星間鏈路的衛(wèi)星導(dǎo)航系統(tǒng)星地業(yè)務(wù)信息傳輸規(guī)劃調(diào)度方法研究
- 結(jié)合單元試驗(yàn)數(shù)據(jù)的指數(shù)型串聯(lián)系統(tǒng)定時(shí)截尾試驗(yàn)可靠性評(píng)估方法
- 事件驅(qū)動(dòng)多關(guān)節(jié)機(jī)械臂軌跡跟蹤自適應(yīng)魯棒控制
- 基于分布式壓縮感知的麥克風(fēng)陣列聲源定位