基于ANSYSWorkbench的焊接機(jī)器人的性能分析
2019-09-10 07:22:44李世杰鄭培飛溫帥馬金艷
河北工業(yè)大學(xué)學(xué)報(bào) 2019年4期
李世杰 鄭培飛 溫帥 馬金艷
摘要 對ABB公司2600ID焊接機(jī)器人進(jìn)行研究,分析其結(jié)構(gòu)性能以便為其之后的結(jié)構(gòu)改進(jìn)提供重要的數(shù)據(jù)依據(jù)。采用ANSYS對研究的焊接機(jī)器人簡化模型進(jìn)行結(jié)構(gòu)靜力學(xué)分析,得到機(jī)器人工作時(shí)的薄弱環(huán)節(jié)。然后針對薄弱環(huán)節(jié)進(jìn)行結(jié)構(gòu)動(dòng)力學(xué)模態(tài)分析,得到其前6階振型云圖,分析它的固有頻率和各階的振動(dòng)型態(tài),確定其工作時(shí)產(chǎn)生的振動(dòng)變形。基于此對薄弱環(huán)節(jié)進(jìn)行諧響應(yīng)分析,確定其在工作過程中具體的變形以及應(yīng)力變化情況。利用ANSYS對機(jī)器人的分析結(jié)果可以很好的指導(dǎo)機(jī)器人的工作并減少對機(jī)器人產(chǎn)生的危害,同時(shí)為結(jié)構(gòu)的改進(jìn)提供重要的數(shù)據(jù)依據(jù)。
關(guān) 鍵 詞 焊接機(jī)器人;ANSYS;靜力學(xué)分析;模態(tài)分析;諧響應(yīng)分析
中圖分類號 TP242? ? ?文獻(xiàn)標(biāo)志碼 A
Abstract This paper studies ABB's 2600ID welding robot and analyzes its structural performance in order to provide an important data basis for its subsequent structural improvement. ANSYS is used to analyze the simplified model of the welding robot, and the weak link of the robot is obtained. Then, the structural dynamics of the weak link is analyzed, and the first 6-order mode cloud is obtained. The natural frequency and the vibration patterns of each stage are analyzed to determine the vibration and deformation during operation. Based on this analysis of the weak links harmonic response to determine the specific deformation in the course of their work and stress changes.Using ANSYS to analyze the results of the robot can guide the work of the robot and reduce the harm caused by the robot, and provide important data basis for further improvement of the structure.
Key words welding robot; ANSYS; static analysis; modal analysis; harmonic response analysis
0 引言
自1959年美國推出世界上第一臺Unimate型機(jī)器人以來,工業(yè)機(jī)器人的數(shù)量在世界范圍內(nèi)不斷增長,其中有半數(shù)為焊接機(jī)器人[1]。使用焊接機(jī)器人進(jìn)行焊接工作具有高品質(zhì)、高效率、高速度、高穩(wěn)定性、柔性化、短周期、勞動(dòng)環(huán)境好等顯著優(yōu)勢,在現(xiàn)代焊接技術(shù)領(lǐng)域具有越來越重要的地位[2]。因此研究機(jī)器人的整體結(jié)構(gòu)性能和關(guān)鍵部件的固有動(dòng)態(tài)性能,進(jìn)而為機(jī)器人結(jié)構(gòu)的改進(jìn)提供重要的數(shù)據(jù)依據(jù)和理論依據(jù)是很重要的。
本文研究對象為ABB公司的2600ID型號的弧焊機(jī)器人。ABB集團(tuán)作為六軸機(jī)器人的發(fā)明者,其集團(tuán)的機(jī)器人重復(fù)精度高,結(jié)構(gòu)穩(wěn)定性好,而2600ID焊接機(jī)器人結(jié)構(gòu)緊湊、底座半徑極小、手腕異常纖細(xì),在狹小空間都能夠完成很多復(fù)雜動(dòng)作,是當(dāng)前應(yīng)用率最高的弧焊機(jī)器人。針對2600ID焊接機(jī)器人,利用ANSYS Workbench對其進(jìn)行整體的靜力學(xué)分析以及對其薄弱環(huán)節(jié)進(jìn)行進(jìn)一步的模態(tài)分析和諧響應(yīng)分析,可以得到機(jī)器人在工作狀況下的結(jié)構(gòu)變形和受力情況,從而為改善當(dāng)前焊接機(jī)器人技術(shù)提供有力的數(shù)據(jù)依據(jù)。
1 焊接機(jī)器人靜力學(xué)分析
1.1 焊接機(jī)器人有限元模型的建立
本次建模采用SolidWorks進(jìn)行模型設(shè)計(jì),將設(shè)計(jì)出的機(jī)器人模型導(dǎo)入ANSYS 14.5中進(jìn)行有限元分析。以ABB公司的2600ID焊接機(jī)器人為原型建立的機(jī)器人數(shù)學(xué)模型(圖1)包括基座、腰座、大臂、肘關(guān)節(jié)、小臂、手腕翻轉(zhuǎn)和手腕旋轉(zhuǎn)部分。
立足于機(jī)器人運(yùn)動(dòng)特性和樣機(jī)結(jié)構(gòu)特性,在保證全面準(zhǔn)確地反映部件的剛度以及不影響所要求的分析精度下,對機(jī)器人的三維模型進(jìn)行適當(dāng)簡化,從而節(jié)省大量的分析時(shí)間,避免資源的浪費(fèi)[3]。本次有限元簡化模型(圖2)對機(jī)器人的電動(dòng)機(jī)以及一些不影響分析精度的特征如圓角、倒角、螺紋孔等進(jìn)行了簡化。
由于結(jié)構(gòu)上的限制,焊接機(jī)器人有一定的工作區(qū)域(圖3),工作過程中機(jī)器人各部分配合運(yùn)動(dòng),從而產(chǎn)生不同的姿態(tài),因此我們在研究機(jī)器人的靜力學(xué)結(jié)構(gòu)特性時(shí),選擇一種機(jī)器人處在工作極限位置的姿態(tài)來進(jìn)行分析。如圖4所示,本次有限元分析基于機(jī)器人處于水平方向的極限位置進(jìn)行結(jié)構(gòu)分析,在此姿態(tài)下,大臂與水平方向的夾角為5°,小臂、手腕翻轉(zhuǎn)部件均沿著水平方向向前。
1.2 焊接機(jī)器人靜力學(xué)分析
在線性結(jié)構(gòu)靜力學(xué)分析中,材料屬性必須輸入彈性模量和泊松比,本次有限元建模中,機(jī)器人的材料選用鋁合金,其密度為2 770 kg/m3,彈性模量為71 GPa,泊松比為0.33。網(wǎng)格劃分時(shí)網(wǎng)格的疏密會直接影響計(jì)算結(jié)果精度,網(wǎng)格太稀疏會使得計(jì)算結(jié)果精度降低,網(wǎng)格太密集,會使得計(jì)算時(shí)間過長[4]。 本次劃分網(wǎng)格是采用自動(dòng)網(wǎng)格劃分方法,經(jīng)過適當(dāng)調(diào)整,整個(gè)模型共劃分為3 312個(gè)單元格和6 137個(gè)節(jié)點(diǎn)。
基于機(jī)器人實(shí)際的工作環(huán)境和工作狀況,在進(jìn)行有限元分析時(shí),限制模型基座的6個(gè)自由度包括沿著X、Y、Z 3軸的移動(dòng)和轉(zhuǎn)動(dòng)。由于所選機(jī)器人最大載荷為8 kg,所以在執(zhí)行末端手腕旋轉(zhuǎn)部位添加方向垂直向下的集中載荷80 N,經(jīng)過有限元分析計(jì)算,在負(fù)載力作用下機(jī)器人水平極限位置的應(yīng)力變化和位移變化如圖5所示。
從應(yīng)力云圖上可以看出機(jī)器人在受到執(zhí)行末端的集中載荷后,最大應(yīng)力產(chǎn)生在肘關(guān)節(jié)的應(yīng)力集中處,為0.694 MPa,其遠(yuǎn)小于鋁合金的許用應(yīng)力235 MPa,顯然機(jī)器人結(jié)構(gòu)合理并且能夠滿足強(qiáng)度要求。同時(shí)大臂部分產(chǎn)生的應(yīng)力變化最明顯,在大臂左右邊緣同時(shí)靠近肘關(guān)節(jié)的部位產(chǎn)生了較大的應(yīng)力值0.617 MPa。根據(jù)位移云圖可以分析出在受到執(zhí)行末端的集中載荷后,從機(jī)器人大臂部分開始產(chǎn)生位移變化,并在手腕旋轉(zhuǎn)部分達(dá)到最大的變形,為32.371 mm。
靜力分析結(jié)果表明機(jī)器人在工作時(shí),大臂是受到影響最大的部分,確定其是機(jī)器人整體結(jié)構(gòu)的薄弱環(huán)節(jié)。接下來將針對大臂這一薄弱環(huán)節(jié)進(jìn)行動(dòng)力學(xué)模態(tài)分析,詳細(xì)了解大臂在振動(dòng)工作過程中產(chǎn)生的變化。
2 焊接機(jī)器人大臂模態(tài)分析
振動(dòng)模態(tài)是彈性結(jié)構(gòu)固有的、整體的特性。模態(tài)分析主要研究的是零部件模型的固有頻率與振型。每個(gè)零部件都有其本身固有的振動(dòng)頻率,當(dāng)該振動(dòng)頻率被激活時(shí),將會產(chǎn)生與之相對應(yīng)的振動(dòng)形態(tài),分別稱之為共振頻率和振動(dòng)模態(tài)[5]。如果通過模態(tài)分析搞清楚結(jié)構(gòu)在某個(gè)頻率范圍內(nèi)易受影響,就可以預(yù)知結(jié)構(gòu)在此頻段內(nèi),受外界載荷作用下的實(shí)際振動(dòng)響應(yīng),從而為結(jié)構(gòu)設(shè)計(jì)避免共振、優(yōu)化系統(tǒng)動(dòng)態(tài)特性提供參考依據(jù)[6]。
無阻尼模態(tài)分析是經(jīng)典的的特征值問題,動(dòng)力學(xué)問題的運(yùn)動(dòng)方程為上述方程式是經(jīng)典的特征值問題,該方程的特征值為[ω2i],其開方[ωi]就是自振圓頻率,自振頻率為[f=ωi2π],特征值對應(yīng)的特征向量[xi]為自振頻率[f=ωi2π]下對應(yīng)的振型[7]。
2.1 焊接機(jī)器人大臂有限元模型的建立
在Solidworks中建立大臂模型,由于機(jī)器人大臂并不存在使ANSYS有限元分析時(shí)間過長的復(fù)雜結(jié)構(gòu),所以本文采用原始模型進(jìn)行分析,以得到更高的計(jì)算精度,模型如圖6所示。
2.2 焊接機(jī)器人大臂模態(tài)分析
受不變載荷作用下所產(chǎn)生的應(yīng)力會影響到結(jié)構(gòu)的固有頻率,尤其對于在某一個(gè)或兩個(gè)尺寸上很薄的結(jié)構(gòu)來說影響更大,因此結(jié)構(gòu)分析時(shí)要考慮到預(yù)應(yīng)力的影響[7]。為了更準(zhǔn)確的反映機(jī)器人大臂在工作情況下的應(yīng)力以及位移變化,在進(jìn)行模態(tài)分析前給大臂模型設(shè)定具體的工作要求。由于機(jī)器人大臂進(jìn)行的是繞腰座進(jìn)行的旋轉(zhuǎn)運(yùn)動(dòng),其最大旋轉(zhuǎn)速度為[175]°/s,所以設(shè)定其旋轉(zhuǎn)角速度為[3.05 rads]。
在模態(tài)分析中,材料屬性包括彈性模量、泊松比和材料密度是必須定義的,此次分析選用的材料與焊接機(jī)器人靜力學(xué)分析的材料相同,均采用鋁合金。劃分網(wǎng)格時(shí)采用自動(dòng)網(wǎng)格劃分方法,同樣經(jīng)過適當(dāng)調(diào)整后,得到的網(wǎng)格如圖7所示,共產(chǎn)生單元格18 260個(gè),節(jié)點(diǎn)30 107個(gè)。
由于大臂是繞著腰座進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng),所以在大臂與腰座連接的部位加載圓柱面約束,設(shè)置其徑向方向?yàn)樽杂桑S向和切向?yàn)楣潭ǎ缓笄蟪銎淝?階固有頻率和振型。經(jīng)過ANSYS分析計(jì)算,得到大臂的前6階振型云圖如圖8所示,大臂前6階固有頻率和振型描述如表1所示。
從模態(tài)分析結(jié)果中可以看出,機(jī)器人大臂的第1階和第2階振型都是沿著一個(gè)方向擺動(dòng),所以提高大臂的剛度可以改善大臂的動(dòng)態(tài)性能,減少大臂在低階頻率時(shí)的結(jié)構(gòu)變形。從第3階固有頻率開始,機(jī)器人大臂出現(xiàn)沿著某一方向的彎曲或扭曲變形,所以在第3階固有頻率之上工作會對大臂結(jié)構(gòu)產(chǎn)生很大的危害。參考大臂的固有頻率,在機(jī)器人工作過程中,應(yīng)極力避免共振現(xiàn)象的出現(xiàn)。
3 焊接機(jī)器人大臂諧響應(yīng)分析
諧響應(yīng)分析主要用于持續(xù)的周期載荷在結(jié)構(gòu)中產(chǎn)生的持續(xù)周期響應(yīng),以及確定線性結(jié)構(gòu)承受隨時(shí)間按正弦規(guī)律變化的載荷時(shí)的穩(wěn)態(tài)響應(yīng)。進(jìn)行諧響應(yīng)分析的目的是確保結(jié)構(gòu)能經(jīng)受住頻率的各種正弦載荷以及探測共振響應(yīng),并在必要時(shí)避免其發(fā)生[8]。
由經(jīng)典力學(xué)理論可知,物體的動(dòng)力學(xué)方程為
[Mx+Cx+Kx=Ft] 。 (4)
式中:[M]為質(zhì)量矩陣;[C]為阻尼矩陣;[K]為剛度矩陣;[x]為位移矢量;[Ft]是力矢量;[x]為速度矢量;[x]為加速度矢量。
在諧響應(yīng)分析中,力載荷為
[F=F0sinωt]。 (5)
對于焊接機(jī)器人來說,其工作過程為機(jī)器人帶動(dòng)焊槍在工件表面按照預(yù)設(shè)的軌跡進(jìn)行移動(dòng),在焊接過程中受到的反震力以及自身的振動(dòng)變形都會影響機(jī)器人動(dòng)作的穩(wěn)定性以及準(zhǔn)確性,從而造成焊縫的偏移,無法達(dá)到工作要求。所以對機(jī)器人薄弱環(huán)節(jié)進(jìn)行諧響應(yīng)分析驗(yàn)證其是否能克服共振、疲勞及其他受迫振動(dòng)引起的有害效果是十分必要的。
此次機(jī)器人大臂諧響應(yīng)分析是在其模態(tài)分析的基礎(chǔ)上進(jìn)行的,所以分析過程中的前處理與模態(tài)分析前處理相同,大臂材料采用鋁合金,網(wǎng)格劃分的方法與結(jié)果均與模態(tài)分析時(shí)一致,采用自動(dòng)網(wǎng)格劃分方法,共產(chǎn)生單元格18 260個(gè),節(jié)點(diǎn)30 107個(gè),其網(wǎng)格圖如圖7所示。
機(jī)器人大臂在工作過程中主要受到肘關(guān)節(jié)傳遞過來的力載荷,所以設(shè)置大臂與肘關(guān)節(jié)接觸面為應(yīng)激點(diǎn),其受到的正弦載荷幅值為300 N,方向垂直于接觸面向外,相位角為0°,其受力圖如圖9所示。同樣的,添加預(yù)應(yīng)力可以使諧響應(yīng)分析結(jié)果更準(zhǔn)確地反映機(jī)器人大臂在工作狀態(tài)下基于正弦載荷激勵(lì)下產(chǎn)生的應(yīng)力和位移變化,為機(jī)器人后續(xù)的工作提供更精準(zhǔn)有力的數(shù)據(jù)依據(jù)。預(yù)應(yīng)力的添加參考進(jìn)行模態(tài)分析時(shí)設(shè)定的工作要求,在機(jī)器人大臂和腰座的接觸面添加逆時(shí)針的角速度,其大小為[3.05 rads],角速度示意圖如圖10所示。
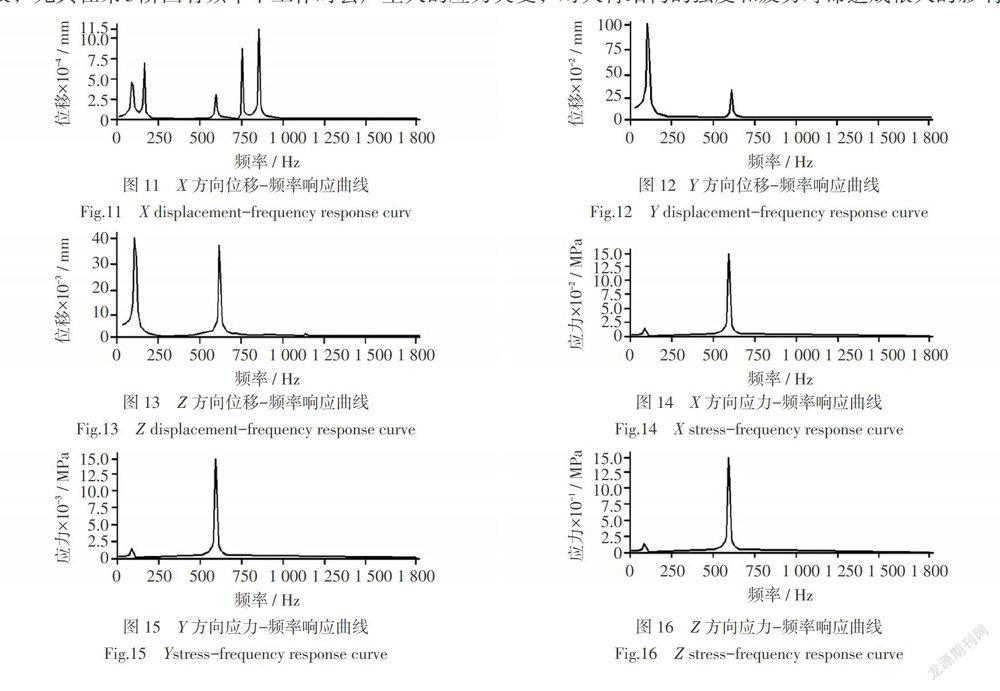
由模態(tài)分析得出機(jī)器人大臂的前6階固有頻率范圍為0 ~ 1 111.4 Hz,所以設(shè)置諧響應(yīng)分析頻率變化范圍為0 ~ 1 800 Hz,采樣點(diǎn)為180個(gè),間隔為10 Hz。經(jīng)過100次掃頻計(jì)算,得到應(yīng)激點(diǎn)X、Y和Z 3個(gè)方向的位移—頻率響應(yīng)曲線,分別如圖11、圖12、圖13所示。對比分析應(yīng)激點(diǎn)處的位移—頻率響應(yīng)曲線可得,X方向即機(jī)器人大臂左右方向隨著頻率的變化振動(dòng)變形較為敏感,在前5階固有頻率處均出現(xiàn)位移峰值,但相較于另外2個(gè)方向變形程度要小很多。Y方向即機(jī)器人大臂前后方向和Z方向即機(jī)器人大臂軸線方向均在第1、3階固有頻率處出現(xiàn)位移峰值,且都在第1階頻率處出現(xiàn)最大位移變化,而Y方向位移變化最為明顯。從分析結(jié)果中可知,機(jī)器人大臂工作時(shí)主要在低頻率階段內(nèi)產(chǎn)生振動(dòng)變形,在第1階固有頻率處發(fā)生共振現(xiàn)象可能性最大,會對機(jī)器人大臂工作的精準(zhǔn)度以及穩(wěn)定性造成較大的影響。
同樣可從分析結(jié)果中得到X、Y和Z 3個(gè)方向的應(yīng)力—頻率響應(yīng)曲線,分別如圖14、圖15、圖16所示。對比分析應(yīng)激點(diǎn)處的應(yīng)力—頻率響應(yīng)曲線可得,X、Y和Z方向的應(yīng)力峰值均出現(xiàn)在第1、3階固有頻率處,且均在第3階固有頻率處應(yīng)力變化最為明顯。同時(shí)可以看出在整個(gè)掃頻過程中Z方向的應(yīng)力變化相較于其他2個(gè)方向要大得多。從分析結(jié)果中可知,機(jī)器人大臂工作過程中的應(yīng)力變化主要產(chǎn)生在低頻率階段,尤其在第3階固有頻率下工作時(shí)會產(chǎn)生大的應(yīng)力突變,對大臂結(jié)構(gòu)的強(qiáng)度和疲勞壽命造成很大的影響。
4 結(jié)論
利用ANSYS對2600ID焊接機(jī)器人進(jìn)行靜力學(xué)分析,可以得出其結(jié)構(gòu)的薄弱環(huán)節(jié)在于機(jī)器人大臂,然后針對薄弱環(huán)節(jié)進(jìn)行預(yù)應(yīng)力下的動(dòng)力學(xué)模態(tài)分析,能夠得到大臂的固有頻率和振型。在此基礎(chǔ)上,對機(jī)器人大臂進(jìn)行諧響應(yīng)分析,得到其在0 ~ 1 800 Hz頻率范圍內(nèi)受到正弦載荷時(shí)的位移和應(yīng)力響應(yīng)曲線,分析可知機(jī)器人大臂在第1、3階固有頻率處工作時(shí),會對機(jī)器人的結(jié)構(gòu)以及工作穩(wěn)定性造成大的影響。參考對機(jī)器人結(jié)構(gòu)的分析結(jié)果,可以指導(dǎo)機(jī)器人的工作,避免工作過程出現(xiàn)共振帶來的危害并為進(jìn)一步的結(jié)構(gòu)改進(jìn)提供理論依據(jù)。
參考文獻(xiàn):
[1]? ? 林尚揚(yáng),陳善本. 焊接機(jī)器人及其應(yīng)用[M]. 北京:機(jī)械工業(yè)出版社,2000.
[2]? ? 王克鴻,高飛,高俊平. 基于視覺的機(jī)器人智能化焊接技術(shù)現(xiàn)狀與發(fā)展[J]. 機(jī)械制造與自動(dòng)化,2010,39(5):1-6.
[3]? ? 張松,喬鳳斌,趙維剛. 基于ANSYS的攪拌摩擦點(diǎn)焊機(jī)器人關(guān)鍵部件的分析與優(yōu)化設(shè)計(jì)[J]. 制造業(yè)自動(dòng)化,2012,34(6):8-10,14.
[4]? ? 董旭,李志杰,徐晶明. 基于ANSYS Workbench六自由度工業(yè)機(jī)器人動(dòng)態(tài)特征分析[J]. 精密制造與自動(dòng)化,2014(3):10-13,43.
[5]? ? 楊明亮,徐格寧,常爭艷,等. 基于有限元法的橋式起重機(jī)橋架模態(tài)分析[J]. 機(jī)械科學(xué)與技術(shù),2012,31(1):135-137
[6]? ? PIRES J N,CARAMELO F J,BRITO P,et al. Robotics in implant dentistry:stress/strain analysis. System overview and experiments[J]. Industrial Robot:an International Journal,2006,33(5):373-380.
[7]? ? 高長銀,李萬全,劉麗,等. ANSYS Workbench 14. 5建模與仿真從入門到精通[M]. 北京:電子工業(yè)出版社,2014.
[8]? ? 商躍進(jìn),王紅. 有限元原理與ANSYS實(shí)踐[M]. 北京:清華大學(xué)出版社,2012.
[責(zé)任編輯 楊 屹]
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
計(jì)算物理(2014年2期)2014-03-11 17:01:39
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
