一種基于曼哈頓世界假說下平面特征的RGB-D視覺室內(nèi)定位方案
2019-09-10 07:22:44蔣育豪陳蕾
華東師范大學(xué)學(xué)報(bào)(自然科學(xué)版)
2019年6期
蔣育豪 陳蕾

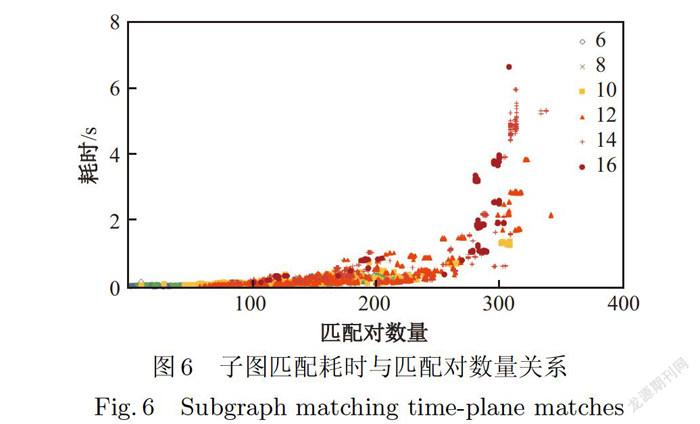

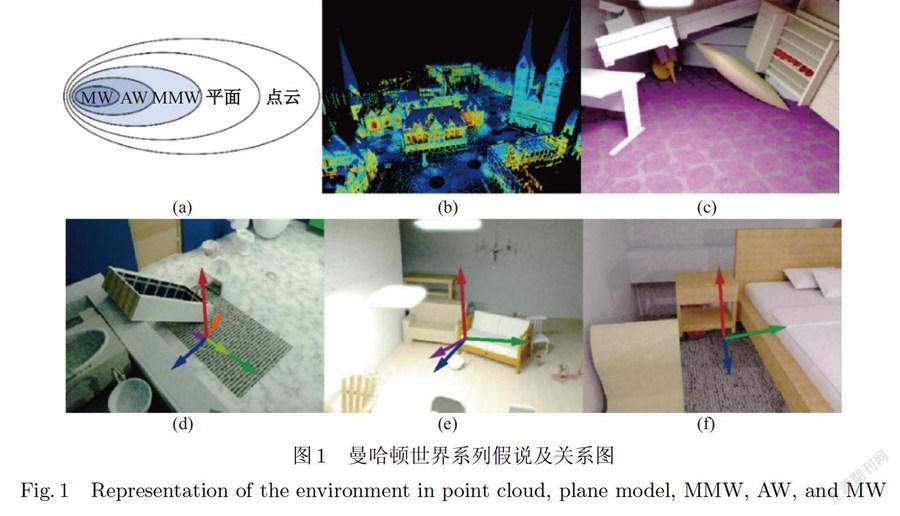
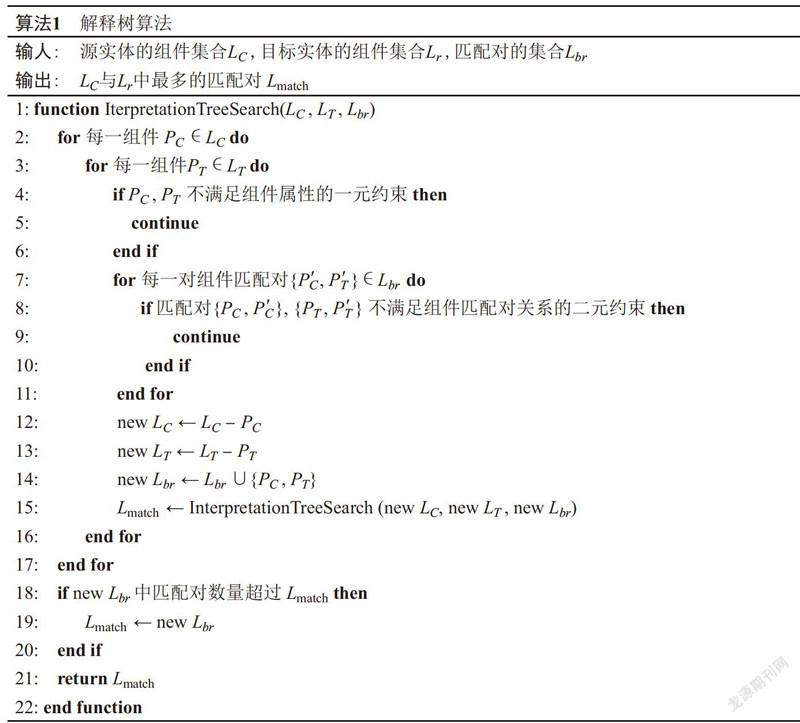
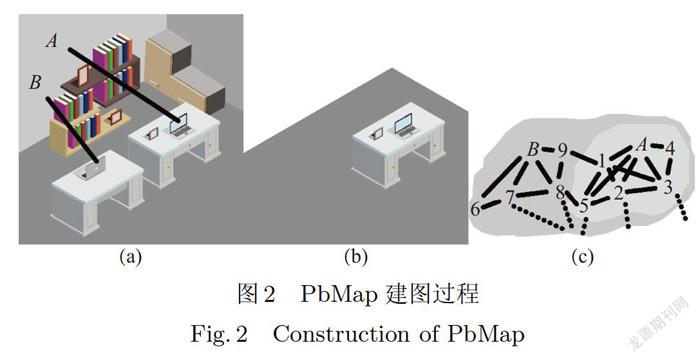


摘要:將曼哈頓世界假說(Manhattan World assumption,MW)引入室內(nèi)定位問題,提出了一種改進(jìn)的基于RGB-D視覺與平面特征的室內(nèi)定位方案,不僅能有效提高場景匹配的成功率,還可簡化未知場景下的定位問題,提高定位效率和實(shí)時(shí)性,可用于對同步定位與建圖SLAM(Simultaneous Localization and Mapping)系統(tǒng)的擴(kuò)展.創(chuàng)新點(diǎn)主要體現(xiàn)在:針對解釋樹匹配的時(shí)間開銷隨特征數(shù)指數(shù)級上升的問題,設(shè)計(jì)了根據(jù)曼哈頓幀的主方向進(jìn)行分解的匹配方法;針對單條行進(jìn)路徑搜索效率有待提高的問題,提出了在初始位姿確定后采用4自由度的簡化定位方案;針對單幀中遍歷執(zhí)行子圖匹配耗時(shí)較長的問題,將小范圍子圖合并為大范圍子圖后進(jìn)行匹配.實(shí)驗(yàn)結(jié)果表明,該方案相較已有的平面特征定位方法,能縮短成功定位所需的行進(jìn)距離,并顯著降低單條行進(jìn)路徑上的平均搜索耗時(shí).
關(guān)鍵詞:定位; 同步定位與建圖; 曼哈頓世界假說
中圖分類號:TP399
文獻(xiàn)標(biāo)志碼:A
DOI: 10.3969/j.issn.1000-5641.2019.06.010
收稿日期:2019-01-11
第一作者:蔣育豪,男,碩士研究生,研究方向?yàn)橐曈X定位.E-mail: krovkov@163.com.
通信作者:陳 蕾,女,副教授,研究方向?yàn)槭覂?nèi)定位.E-mail: lchen@cs.ecnu.edu.cn.
0 引言
室內(nèi)定位(Indoor Localization)問題作為基于位置服務(wù)(Location-Based Service,LBS)、增強(qiáng)現(xiàn)實(shí)(Augmented Reality, AR)、同步定位與建圖(SLAM)等應(yīng)用的關(guān)鍵問題,是近年來領(lǐng)域內(nèi)普遍關(guān)注的熱點(diǎn),現(xiàn)有的解決方案包括基于WiFi信號強(qiáng)度RSSI(Received SignalStrength Indication)、激光雷達(dá)(Lidar)和機(jī)器視覺等,其中機(jī)器視覺方案由于更接近人類感知方式、定位精度較高、室內(nèi)和外場景兼容度高等特點(diǎn)在探索未知環(huán)境的應(yīng)用中格外受到重視;而RGB-D采集設(shè)備……
登錄APP查看全文