基于解耦控制的跨欄跑步點軌跡跟蹤方法研究
2019-09-10 07:22:44吳正李鳳芝
赤峰學院學報·自然科學版 2019年8期
吳正 李鳳芝
摘要:為了提高跑步點軌跡跟蹤的精度,提出基于解耦控制的跨欄跑步點軌跡跟蹤方法.構建約束參量模型和運動學模型,采用非線性雙曲解耦控制模型進行跑步點軌跡參數模糊度辨識,設計比例-積分糾偏控制器完成模糊自適應跟蹤控制,在笛卡兒空間中進行軌跡位置糾偏補償,根據位置糾偏結果進行誤差補償控制,采用解耦控制方法進行軌跡的實時跟蹤和偏差調節,實現跑步點軌跡的跟蹤.仿真結果表明,該方法的糾偏性能較好,跟蹤精度較高,有效提高了跨欄跑步的競技水平.
關鍵詞:解耦控制;跨欄跑步;點軌跡;跟蹤
中圖分類號:TP18;O242? 文獻標識碼:A? 文章編號:1673-260X(2019)08-0008-03
0 引言
在人工智能控制技術不斷發展成熟的背景下,采用智能控制技術進行人體運動學控制成為未來體育訓練的一門重要學科,比如,將智能控制技術應用在跨欄跑步的軌跡跟蹤中,將人體運動學模型和跨欄的障礙分布理解為一組非線性動力學控制模型,采用智能控制和運動學建模方法[1],進行跨欄跑步中的軌跡跟蹤控制,結合避障控制策略,提高對跨欄跑步的點軌跡跟蹤控制能力,從而有效降低不必要的路徑偏差,提高跨欄跑步的競技比賽成績,研究跨欄跑步的點軌跡跟蹤方法,將在跨欄跑步的運動訓練指導中具有重要意義[2].對跨欄跑步的運動點軌跡跟蹤研究是建立在對運動學模型設計基礎上,采用人體位姿的自適應調節方法進行跨欄跑步的優化控制,提出基于解耦控制的跨欄跑步點軌跡跟蹤方法,根據位置糾偏結果進行誤差補償控制,實現跨欄跑步點軌跡跟蹤的參數自適應調節和誤差補償,采用解耦控制方法,進行的跨欄跑步點軌跡的實時跟蹤和偏差調節,提高控制精度,降低跟蹤誤差,最后進行實驗測試分析,得出有效性結論.
1 運動學模型及控制約束參量建模
1.1 跨欄跑步點軌跡跟蹤的運動學模型
為了實現跨欄跑步點軌跡跟蹤,采用誤差補償和路徑糾偏控制方法,進行跨欄跑步點軌跡跟蹤補償控制,首先構建跨欄跑步的運動學模型,采用動態基元逆運動學模型建模的方法[3],構建跨欄跑步點軌跡跟蹤的控制模型,令跨欄跑步點軌跡跟蹤的軌跡點蔡妍特征分布表示為q1=[q1,…q7]T,sinqi和cosqi分別記為 ,并簡記為si和ci,根據位置和指向隨時間變化的軌跡,在運動學坐標系i和i-1之間建立齊次矩陣i-1Ti(qi)可表示跨欄跑步點軌跡跟蹤的多自由度耦合特征量,為:
在最佳軌跡中,跨欄跑步運動員的正向運動學(FK)方程式可用當前位置進行在線預測,根據速度控制和誤差偏移修正方法[4],在慣性坐標系Σ7中,得到人體位姿相對于參考坐標系Σ0的空間分布矩陣為:
根據上式推得k時刻對k+1時刻的預測誤差協方差矩陣,經緯度依次轉換到平面直角坐標系中,得到跑步過程中的人體質心繞腕關節和Σ0原點軸的旋轉狀態矩,采用慣性力矩補償方法進行位姿修正,即可推的跨欄跑步運動員的逆運動學的解析形式為:
通過力反饋修正期望位置,得到跨欄跑步的點軌跡偏離的位姿運動學狀態方程為:
從而得到跨欄跑步運動員的用力向量0T1-1,采用自適應誤差調節方法進行軌跡偏離修正[5],分析平面內的橫坐標參量集,可得:
在載荷轉移約束下跨欄跑步運動員點軌跡跟蹤的誤差矯正向量為:
兩邊再左乘逆矩陣2T1-1(q2)可得:
根據上述對跨欄跑步的運動學模型構建結果進行速度控制和偏移控制.
1.2 控制約束參量
構建跨欄跑步點軌跡跟蹤的約束參量模型和運動學模型,采用非線性雙曲解耦控制模型進行跨欄跑步點軌跡參數模糊度辨識[6],設計跨欄跑步點軌跡跟蹤位置矯正向量元素q3和q4:
3 仿真實驗與結果分析
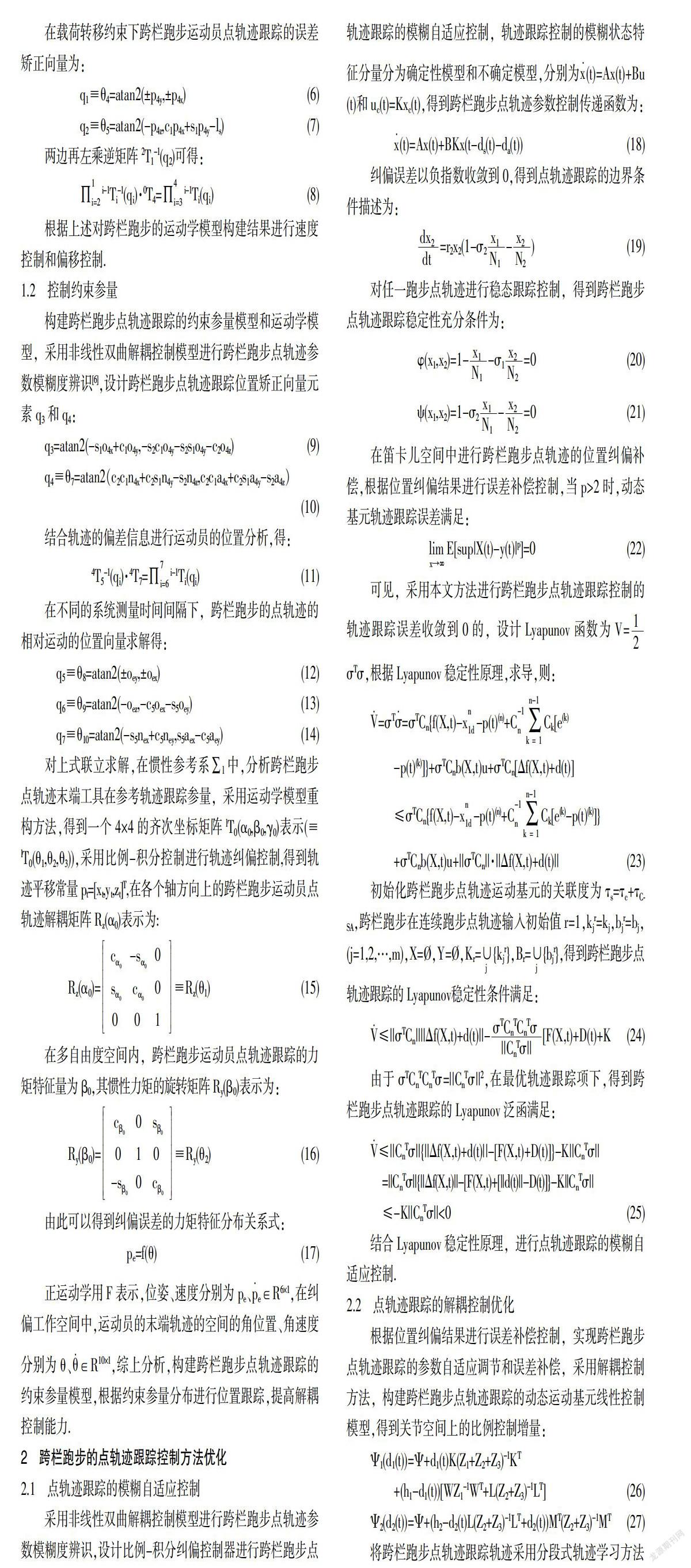
為了驗證該方法在實現跨欄跑步點軌跡跟蹤的應用性能,進行仿真實驗分析,對跨欄跑步點軌跡姿態參量采集的傳感器為電子羅盤LSM303DLH(含加速度計和重力傳感計),采集的跨欄跑步點軌跡的長度為2000,數據的采樣頻率為120KHz,根據上述參量設定,采用非線性雙曲解耦控制模型進行跨欄跑步點軌跡參數模糊度辨識,實現軌跡跟蹤,得到點軌跡跟蹤的參數特征分布如圖1所示.
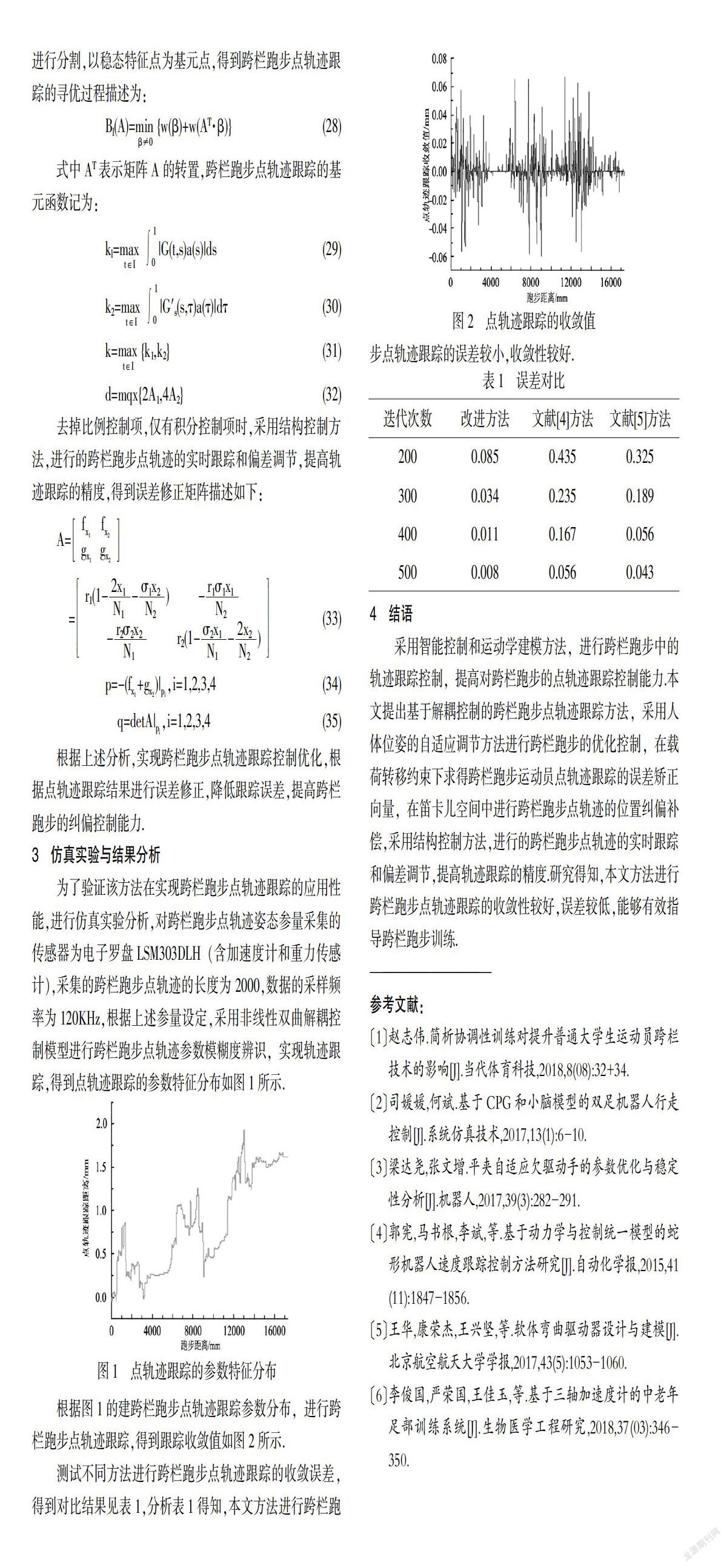
根據圖1的建跨欄跑步點軌跡跟蹤參數分布,進行跨欄跑步點軌跡跟蹤,得到跟蹤收斂值如圖2所示.
測試不同方法進行跨欄跑步點軌跡跟蹤的收斂誤差,得到對比結果見表1,分析表1得知,本文方法進行跨欄跑步點軌跡跟蹤的誤差較小,收斂性較好.
4 結語
采用智能控制和運動學建模方法,進行跨欄跑步中的軌跡跟蹤控制,提高對跨欄跑步的點軌跡跟蹤控制能力.本文提出基于解耦控制的跨欄跑步點軌跡跟蹤方法,采用人體位姿的自適應調節方法進行跨欄跑步的優化控制,在載荷轉移約束下求得跨欄跑步運動員點軌跡跟蹤的誤差矯正向量,在笛卡兒空間中進行跨欄跑步點軌跡的位置糾偏補償,采用結構控制方法,進行的跨欄跑步點軌跡的實時跟蹤和偏差調節,提高軌跡跟蹤的精度.研究得知,本文方法進行跨欄跑步點軌跡跟蹤的收斂性較好,誤差較低,能夠有效指導跨欄跑步訓練.
——————————
參考文獻:
〔1〕趙志偉.簡析協調性訓練對提升普通大學生運動員跨欄技術的影響[J].當代體育科技,2018,8(08):32+34.
〔2〕司媛媛,何斌.基于CPG和小腦模型的雙足機器人行走控制[J].系統仿真技術,2017,13(1):6-10.
〔3〕梁達堯,張文增.平夾自適應欠驅動手的參數優化與穩定性分析[J].機器人,2017,39(3):282-291.
〔4〕郭憲,馬書根,李斌,等.基于動力學與控制統一模型的蛇形機器人速度跟蹤控制方法研究[J].自動化學報,2015,41(11):1847-1856.
〔5〕王華,康榮杰,王興堅,等.軟體彎曲驅動器設計與建模[J].北京航空航天大學學報,2017,43(5):1053-1060.
〔6〕李俊國,嚴榮國,王佳玉,等.基于三軸加速度計的中老年足部訓練系統[J].生物醫學工程研究,2018,37(03):346-350.