基于3S傳感信號(hào)分析的小空間搬運(yùn)車系統(tǒng)及三維模型設(shè)計(jì)研究
2019-09-10 07:22:44姜淑鳳周子業(yè)劉銘劉宏發(fā)
智能建筑與工程機(jī)械
2019年1期
姜淑鳳 周子業(yè) 劉銘 劉宏發(fā)



摘??要:為了解決復(fù)雜搬運(yùn)環(huán)境下的自動(dòng)搬運(yùn)問題,本文設(shè)計(jì)了一個(gè)基于單片機(jī)的小空間搬運(yùn)車智能防盜、防撞、自動(dòng)巡航系統(tǒng),通過超聲波及紅外檢測技術(shù),GSM傳輸技術(shù),3S傳感導(dǎo)航技術(shù),三維數(shù)字化裝配技術(shù),實(shí)時(shí)檢測車輛與車體生存空間的關(guān)系。該搬運(yùn)車搬運(yùn)載體采用輪式二級(jí)升降,托運(yùn)托舉及穩(wěn)定上扶的機(jī)械手結(jié)構(gòu)因此系統(tǒng)自動(dòng)化程度高,搬運(yùn)環(huán)境適應(yīng)性好,有較高的應(yīng)用價(jià)值。
關(guān)鍵詞:3S傳感;模塊集成;2級(jí)搬運(yùn);自動(dòng)避撞巡航系統(tǒng)
中圖分類號(hào):TP391.9 ?文獻(xiàn)標(biāo)識(shí)碼:A ????文章編號(hào):2096-6903(2019)05-0000-00
0?引言
遙感技術(shù)、定位技術(shù)、地理信息技術(shù)這三種技術(shù)的集合統(tǒng)稱為3S技術(shù)。該技術(shù)的應(yīng)用不僅對(duì)地面建設(shè)有重要價(jià)值,而且還在其他方面有著重要意義。其核心技術(shù)是通過各種傳感器采集波信號(hào),根據(jù)獲得信號(hào)進(jìn)行空間數(shù)據(jù)分析,從而掌握被測空間及地表信息然后用于各類控制系統(tǒng)進(jìn)行環(huán)境識(shí)別與導(dǎo)航。基于該項(xiàng)技術(shù)本文設(shè)計(jì)了一個(gè)基于單片機(jī)的小空間搬運(yùn)車智能防盜、防撞、自動(dòng)巡航系統(tǒng)的二級(jí)升降搬運(yùn)車。
1 3S空間識(shí)別模型的建立
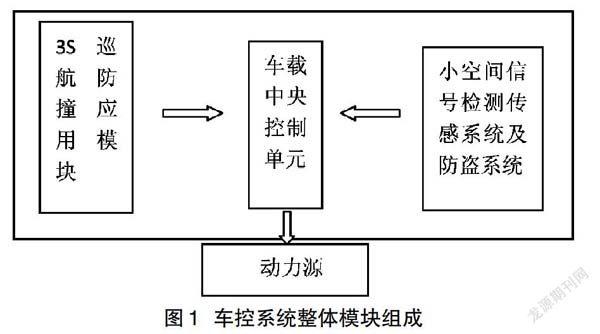
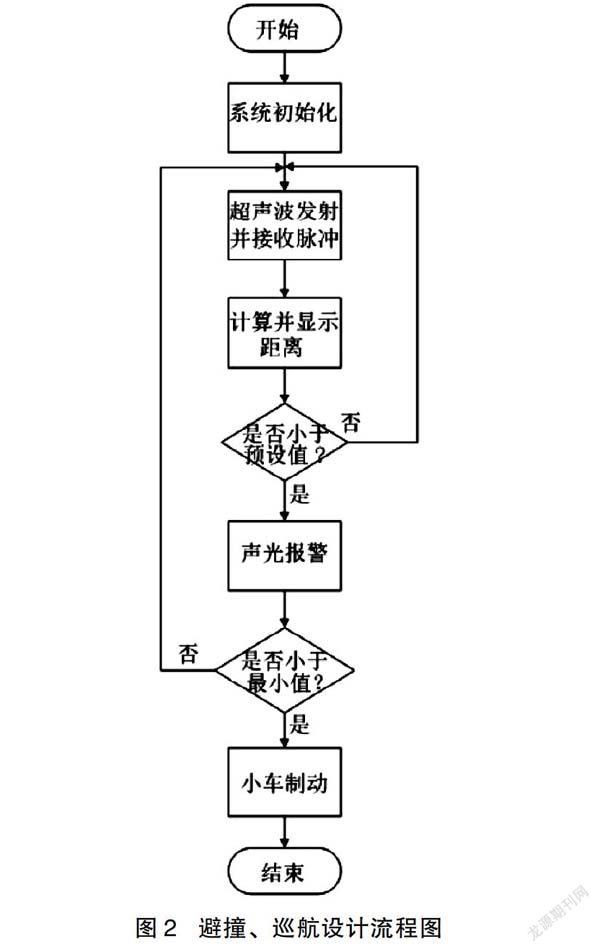
本課題設(shè)計(jì)是基于超聲波測距技術(shù)、紅外線檢測技術(shù)及GSM傳輸技術(shù)來實(shí)現(xiàn)的。超聲波技術(shù)主要用于計(jì)算發(fā)送和接收聲波之間的時(shí)間差,用軟硬件結(jié)合的方法實(shí)時(shí)檢測車輛與異物的距離以提醒車主防止碰撞。紅外檢測和震動(dòng)檢測,是對(duì)車輛布防一個(gè)可行且可靠的防盜系統(tǒng)。利用GSM模塊的通訊協(xié)議,可將小車獲得的空間采樣信息傳輸給主控機(jī),同時(shí)主控機(jī)(用戶手機(jī))利用3S導(dǎo)航系統(tǒng)指揮車載系統(tǒng)的巡航避撞以此來實(shí)現(xiàn)自動(dòng)控制運(yùn)動(dòng),其設(shè)計(jì)流程如圖1所示。……
登錄APP查看全文
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30