基于改進蟻群優化算法的中高速長網紙機速度鏈的控制
2019-09-10 19:05:32湯偉馬強稅宇陽王帥
中國造紙 2019年11期
湯偉 馬強 稅宇陽 王帥

摘要: 對中高速長網紙機而言,確保速度鏈控制滿足工藝要求對紙機正常運行有著重要意義。目前,紙機速度鏈控制多采用常規PID控制,但中高速長網紙機由于自身傳動點多、車速快,故對閉環系統的響應速度和控制精度要求高,常規PID參數整定方法難以滿足上述控制要求。蟻群優化算法(ACO)是一種適合多目標尋優的全局搜索算法,但傳統蟻群算法易陷入局部最優及搜索較慢的問題,對此,本課題將信息素因子(α)和啟發式因子()按一定比例關系隨迭代進行變化,提出一種改進蟻群優化算法,并將其應用于速度鏈PID控制器參數整定中。仿真結果表明,與常規PID控制相比,基于改進的蟻群優化算法PID控制系統響應速度更快、超調更小、抗干擾能力更好、魯棒性更強。應用結果表明,該控制系統可保持紙機各部分速度長期穩定。
關鍵詞:中高速長網紙機;速度鏈控制;改進蟻群優化算法;PID參數優化
中圖分類號:TS736;TP273 ?文獻標識碼:A ?DOI:10.11980/j.issn.0254-508X.2019.11.007
Abstract: For medium and high speed fourdrinier paper machine, ensuring the speed chain control to meet the process requirements is of great significance for the normal operation. At present, the paper machine speed chain control mostly adopts conventional PID control. However the medium and high speed fourdrinier paper machine requires higher response speed of the closed-loop system and control precision due to it has multi driving points and high speed, so the conventional PID parameter tuning method is difficult to meet the above control requirements. Ant colony algorithm (ACO) is a kind of suitable for multi-objective optimization of the global search algorithm, in view of the traditional ant colony algorithm is easy to fall into local optimum and slower search problems, this article will change pheromone factor (α) and heuristic factor (β) according to certain ratio relations with iteration, an improved ant colony algorithm was prepared, and applied to the speed chain of PID control parameters setting. Simulation results showed that, compared with conventional PID control, the improved ant colony algorithm based PID control system had higher response speed, smaller overshoot, better anti-interference ability and stronger robustness. Application results showed that the speed of each part of the paper machine was stable for a long period.
Key words: medium and high speed fourdrinier paper machine; speed chain control; improved ant colony algorithm; PID parameter optimization
速度鏈控制是紙機正常運行的基礎,一旦傳動點之間的速比失衡或者速度波動頻繁,就會造成紙張的斷裂或堆積,從而導致停機事故的發生[1-3]。造成傳動點速比失衡的原因較多:在卷取部,電機拖動的負載隨時間的變化發生改變從而導致傳動點速度變化,如果不能快速準確地調整,則會導致速比失衡,若電機供電電壓出現波動,也會導致速比失衡;紙機車速調整時,如果某一部分速度響應不及時,則會造成斷紙[4]。因此,對于傳動系統速度鏈的控制十分重要。目前,速度鏈的控制一般采用PID控制,PID的參數整定大多采用試湊法和人工經驗進行整定[5]。但對于中高速長網紙機,由于車速快、傳動點多、傳統的參數整定法得到的參數難以滿足高速運行情況下速度鏈控制系統對響應速度和精度要求。
蟻群優化算法(ACO)[6]是一種通過模擬自然界中螞蟻尋找覓食最優路徑而提出的仿生智能算法,具有正向反饋機制、魯棒性強等特點,目前多應用于解決旅行商問題,通過在較優路徑上增加信息素濃來增大下次尋優過程中被選擇的概率。而評判路徑優劣的準則由目標函數決定。利用蟻群算法的這些特點,將其應用于PID參數優化之中,通過對信息素濃度增減的判定標準進行修改,將目標函數改為與閉環控制系統超調量σ、上升時間tr和調整時間ts有關的函數,以此來判斷閉環控制系統性能并作為信息素濃度增減的標準。對于性能較優的路徑增加信息素濃度,可以提高被選擇的概率。
本文在簡要闡述速度鏈控制基本原理的基礎上,將課題組改進的ACO用于PID控制器參數的改進,并將所得PID控制器用于造紙機傳動速度鏈的控制。以仿真及應用結果證明論文算法的有效性。
1 速度鏈控制原理
紙機傳動系統如圖1所示,一般包括成形部、壓榨部、干燥部、壓光和卷取等幾部分[7]。其中每部分都包含了一個到幾個不等的導輥,其中一些導輥與電機相連,稱為傳動系統的傳動點。剩下的導輥則是在傳動點的驅動下,由網布或毛布拖動運行[8]。
所有的傳動點共同組成一個鏈式結構,稱為速度鏈。在紙張的生產過程中,由于工藝原因會造成紙張的延展伸長。因此,對于傳動系統各個部分的速度要求也有所不同,所以必須對各傳動點電機進行速度控制,保證各傳動點速度穩定,相鄰傳動點之間速比穩定[9]。
2 ACO的改進
2.1 ACO的基本思想
螞蟻在尋找食物時會在經過的路徑上釋放一種叫信息素的物質,在距離食物較短的路徑上,信息素揮發的慢,殘留濃度高,會吸引更多螞蟻,最終所有的螞蟻都會選擇同一條路徑,即為蟻群優化算法(ACO)[10]。
2.2 ACO數學模型
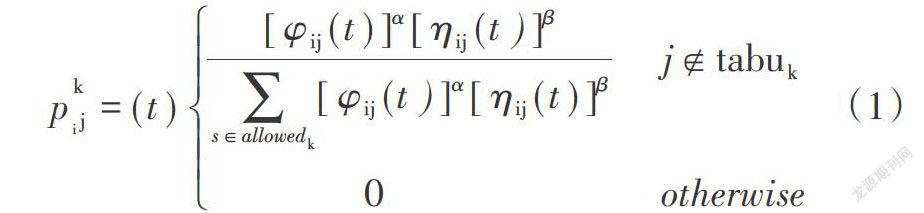
假設給定n個城市,從某一城市出發訪問其余各城市1次后,再回到原出發城市,要求尋找出一條最短線路。在初始時刻,假設尋優過程的每條路徑上的信息素濃度都相同。定義(0)=C(C是一個常數),螞蟻k(k=1.2.3…m)在尋優過程中,根據各條路徑上信息素濃度的大小以一定的概率(t)決定轉移的方向,(t)可表示為式(1)。
式中,為路徑(i,j)的能見度;(t)為t時刻路徑ij上的信息素量;α為信息素的相對重要性(α),稱為啟發因子;為能見度的相對重要性(),稱為期望啟發因子。
蟻群中的m只螞蟻全都完成一次旅行后,對城市間信息素含量的更新見式(2)和式(3)。
式中,為螞蟻k在本次循環中留在路徑ij上的信息素量;為信息素的持久因子,()。
通常用ant-cycle system作為基本的討論模型,該模型能夠體現全局范圍內最短的路徑,同時也能夠提高系統的收斂速度。其表達式見式(4)[11]。
2.3 ACO的改進及仿真
蟻群算法是求解組合最優問題的常用方法,具有較好的尋優效果。但該算法本身也存在一些缺陷,如尋優過程花費時間較長、容易出現停滯現象、陷入局部尋優等[12]。導致這些問題的主要原因是α、的選取不當。本文通過多次仿真實驗發現在迭代過程中改變α、的比例關系會取得很好的實驗結果。迭代初期,將α值設定的較小,值設定的相對較大,以啟發式作為螞蟻狀態轉移概率的一個主要參考因素,螞蟻選擇道路的概率大小主要由啟發式決定,從而避免了信息素濃度的積累導致的局部尋優;隨著迭代的進行,將α值變大,同時減小β值,增加信息素濃度在概率選擇上的重要程度,會使信息素濃度高的路徑上的信息素濃度近一步積累,加速蟻群算法的收斂速度,得到最優路徑。α、比例關系如式(5)所示。
以31個城市的旅行商問題為例。蟻群在31個城市隨機出發,游歷一星期,求經過所有城市的最優路徑。
圖2為傳統蟻群算法旅行商問題仿真結果,整個過程經過65次迭代左右得到最優路徑,其中,Lbest=15601.9195329187。
按上述優化過程對傳統蟻群算法進行優化改進,經優化后的蟻群算法路徑尋優如圖3所示。雖然前期收斂速度緩慢,但是中期加速收斂并經過52次收斂得到最優解,最優路徑Lbest=15588.2935578277。
仿真實驗表明,經過對蟻群算法的改進可以加快收斂速度,且經過改進的蟻群算法在尋優過程中最優路徑比傳統蟻群算法所得最優路徑更短,結果更優。改進蟻群算法部分程序如圖4所示。
3 基于改進ACO的PID參數優化
圖4 改進ACO的程序圖
3.1 基于改進ACO的PID控制系統結構
PID控制因為去結構簡單、易于實現,目前被廣泛的應用于工業控制,其控制系統原理圖如圖5所示。
當系統連續時,控制量與偏差量滿足式(6)[13]。
式中,u(n)為第n次控制量,e(n)為第n次誤差,為比例系數,、分別為積分時間常數和微分時間常數。且=/,=·,一般來說一組,可以決定控制系統性能的好壞。基于改進ACO的PID控制系統圖如圖6所示。
3.2 蟻群游歷節點及路徑的生成[14]
利用改進ACO對PID參數優化過程:在XOY平面生成蟻群尋優路徑,同時定義每條路徑對應的PID參數。假設3個優化參數都有5位有效數字,小數點前面1位,后面4位。因此在設計XOY平面的過程中,每個單位橫坐標代表1位有效數字,橫坐標一共有3×5=15位,每個有效數字的取值范圍在0~9之間也就是10位。所以XOY平面設計橫坐標有15個單位長度,縱坐標為10個單位長度如圖7所示。
圖7代表螞蟻隨機選擇的一條路徑,螞蟻從原點出發,經過每個橫坐標時隨機經過該橫坐標與縱坐標相交節點(i=0,1,2…15),直到最后到達,在此過程中一共經過了15個節點。螞蟻每在XOY平面游歷一次,都會有一條包含15個坐標的折線,坐標對應PID參數如式(9)所示。
3.3 蟻群游歷節點及路徑的選擇
由于蟻群算法優化PID參數與傳統的TSP問題有所區別,本文對旅行商問題中的狀態轉移概率等公式進行調整,使其滿足解決PID參數優化問題需要。
其中,螞蟻K在t時刻由上某一節點向上某一節點轉移的概率計算見式(11)。
式中,、、為Z-N法整定的PID參數對應的系統超調量、上升時間以及調節時間;、、為螞蟻K經歷的路徑節點所生成的PID參數對應的控制系統動態性能。、、為權值,一般為經驗所得。在此取=0.6,=0.2,=0.2。
3.4 PID參數優化整定步驟[15]
Step1:初始化。設置蟻群算法相關參數,如蟻群數量m,最大迭代次數NC_Max,信息素濃度、啟發式和啟發因子等。
Step2:利用Z-N法計算PID 3個參數,并按式(10)確定蟻群搜索范圍。
Step3:將螞蟻放置原點并開始爬行,其向各個節點爬行的概率按式(11)確定。
Step4:所有螞蟻每完成一次從原點歷經15個節點的爬行后,完成一次爬行過程,記錄15個節點的節點坐標,按式(9)計算對應的PID參數。
Step5:將PID參數賦值給PID控制器,運行系統仿真,計算目標函數值,并將最優結果記錄下來。
Step6:按照式(2)、式(3)、式(4)、式(11)、式(12)更新信息素濃度。
Step7:返回Step1進行下一次迭代,直到到達最大迭代次數停止。
4 仿真與實驗結果
為驗證改進ACO的效果,基于MATLAB軟件進行仿真實驗。紙機速度鏈系統可視為由變頻器和三相異步電機組成。在仿真建模過程中[12],可將異步電機近似看作輸入為頻率f、輸出為轉速n的單變量線性環節,其傳遞函數為,。把變頻器也看作一階慣性環節,當變頻器輸入控制電壓為u,輸出為f時,其傳遞函數為,其中。按照控制系統的基本參數可設定控制器的控制對象傳遞函數為式(14)[16]。
4.1 設定值跟蹤性能比較
分別將改進ACO與傳統ACO、Z-N法進行仿真實驗對比,3種不同控制方法整定出的PID參數如表1所示,搭建的Simulink模型如圖8所示。
系統在3種控制方法下,分別加入單位階躍信號,實際生產中,紙張定量及種類發生變化時均會對系統產生干擾,為驗證系統的抗干擾性,在第30 s添加幅值為1的階躍信號作為干擾信號,最終獲得的系統階躍響應曲線如圖9所示,階躍響應下的系統動態性能指標如表2所示,階躍擾動下的系統動態性能指標如表3所示。
由表2可知,與Z-N法及ACO相比,改進ACO控制系統超調量最小,調整時間最小。由表3可知,在加入階躍擾動的情況下,基于改進ACO令系統的超調量最小,波動時間最短,說明改進ACO的系統響應速度最快、調節時間最短、抗干擾性能最好。
4.2 魯棒性能比較
實際生產中被控對象數學模型受非線性因素的影響而失配,失配20%后的數學模型仿真如圖10所示。
在被控對象模型失配的情況下,分別對3種控制方法加入階躍信號,并在第30 s加入幅值為1的階躍信號作為干擾信號,最終獲得的模型失配下系統階躍響應曲線如圖11所示,階躍響應下的系統動態性能指標如表4所示,階躍擾動下的系統動態性能指標如表5所示。
上述仿真結果表明,與Z-N法及傳統ACO相比,基于改進的ACO PID控制系統在被控對象數學模型失配時在速度鏈閉環控制系統中的響應速度更快、超調量更小抗干擾能力更強。且經過改進ACO優化的PID參數魯棒性更強。
5 算法實現及應用
目前,該算法已應用于保定某造紙廠傳動控制系統。在實際設計中,選取S7-400PLC,變頻器及三相交流電機與工業控制計算機組成紙機的三級傳動控制系統,各級之間通過profibus-DP或光纖實現通信,同時使用OPC技術,實現在上位機中的MATLAB與WinCC進行數據交換。其中圖12是長網紙機卷取部速度實時監控圖,在卷取過程中,電機帶動的導輥負載時刻發生變化,監控圖顯示,卷取部分速度平穩,波動幅度很小。紙機正常運行,無斷紙停機情況發生。
6 結 論
本文提出的基于改進蟻群算法(ACO)的PID控制既提高了蟻群算法的收斂速度,又解決了算法本身因為影響因子所導致的局部尋優問題,與傳統ACO相比,改進后的ACO具有更好的尋優結果。同時,MATLAB仿真結果也表明,在速度鏈控制系統中,基于改進ACO的PID控制系統相較于傳統ACO PID控制系統和常規PID控制系統的響應速度更快、超調量小、抗干擾能力更強且魯棒性也更好。速度鏈控制系統運行結果表明,各傳動點速度可以更好地跟蹤設定值,速度波動幅度很小,車速升降各傳動點速度響應快,各部分之間速比穩定。紙機可保持長時間不斷紙、不停機,有效減少了企業因停機造成的損失。
參 考 文 獻
[1] Feng Haichuan. Design of transmission control system for high speed paper machine[D]. Jinan:Shandong University,2007.馮海川. 高速紙機交流變頻分部傳動控制系統設計[D]. 濟南:山東大學, 2007.
[2] WANG Sue, HAO Pengfei. Present Situation and Development Trend of Paper Machine Transmission System[J]. China Pulp & Paper, 2007, 26(1):52..王素娥, 郝鵬飛. 紙機傳動系統的現狀及發展趨勢[J]. 中國造紙, 2007, 26(1):52..
[3] JIN Yongfan. Application of Master-slave Control in Paper Machine Drive System[J]. China Pulp & Paper, 2006, 25(1):67.金勇范. 主從控制在紙機傳動系統中的應用[J]. 中國造紙, 2006, 25(1):67.
[4] MA Wenming. Design and Application of Paper Machine Drive Control System Based on A-B Platform[J]. China Pulp & Paper, 2017, 36(4):55.馬文明. 基于A-B平臺的造紙機傳動控制系統設計及應用[J]. 中國造紙, 2017, 36(4):55.
[5] Zhong Liang. Design of Electric Drive Control System of Paper Machine Based on PLC[D].Beijing : North China Electric Power University ,2014.鐘 亮. 基于PLC的紙機電氣傳動控制系統設計[D]. 北京:華北電力大學, 2014.
[6] Pin Z , Xiao-Ping L , Hong-Fang Z . An ant colony algorithm for job shop scheduling problem[C]// Intelligent Control and Automation, 2004.
[7] XU Deyu. Paper Machine Frequency Conversion Drive PLC Control[J]. China Pulp & Paper, 2005, 24(10):48.許德玉. 紙機變頻傳動的PLC控制[J]. 中國造紙, 2005, 24(10):48.
[8] Chen Xi.Research on Section-drive Multi-motor Synchronous Control System of Paper Machine[D].Jinan:Shandong University, 2009.陳 曦. 造紙機分部傳動多電機同步控制系統研究[D]. 濟南:山東大學, 2009.
[9] MENG Yanjing, LI Honglei. Research on Transmission Control System of High-speed Sanitary Paper Machine[J]. China Pulp & Paper, 2011,30(6):53.孟彥京, 李紅壘. 高速衛生紙機傳動控制系統研究[J]. 中國造紙, 2011, 30(6):53.
[10] Duan Haibin. Principle and application of ant colony algorithm[M]. Beijing:Science Press, 2005.段海濱. 蟻群算法原理及其應用[M]. 北京: 科學出版社, 2005.
[11] Zhang Jihui,Gao Qisheng. A Self-Adaptive Ant Colony Algorithm[J]. Control Theory and Application, 2000, 17(1):1.張紀會, 高齊圣. 自適應蟻群算法[J]. 控制理論與應用, 2000, 17(1):1.
[12] LI Qian,SHE Du,TANG Wei. The Application of Improved Ant Colony Algorithm in the Advance and Retreat Control of Disc Mill[J]. China Pulp & Paper,2017,36(9):48.李 茜, 佘 都, 湯 偉. 改進蟻群算法在盤磨進退刀控制中的應用[J]. 中國造紙, 2017,36(9):48.
[13] CHEN Shuqian,ZHANG Lihong. Application Reaerrch about PID Parameters Optimization Based on Ant Conlony Algotithm[J]. Computer Simulation,2011(1):238.陳書謙,張麗虹. 蟻群算法在PID控制器參數優化中的應用研究[J]. 計算機仿真,2011(1):238.
[14] Tang Wei,Feng Xiaohui,Sun Zhenyu,et al. PID parameter optimization based on ant colony algorithm [J]. Journal of Shaanxi University of Science & Technology, 2017, 35(35):153.湯 偉, 馮曉會, 孫振宇,等. 基于蟻群算法的PID參數優化[J]. 陜西科技大學學報, 2017, 35(35):153.
[15] Duan Haibin,Wang Daobo,Huang Xianghua,et al. Research and realization on parameters optimization of PID controller based on ant colony algorithm[J]. Engineering Journal of Wuhan University, 2004, 37(5):97.段海濱, 王道波, 黃向華, 等. 基于蟻群算法的PID參數優化[J]. 武漢大學學報(工學版), 2004, 37(5):97.
[16] Wei Yanfang. Research on the Variable Domain Fuzzy PID Control of Paper Machine Synchronous Drive System[D]. Jiaozuo: Henan Polytechnic University,2009.韋延方. 紙機同步傳動系統的變論域模糊PID控制研究[D].焦作:河南理工大學,2009.
(責任編輯:董鳳霞)
