基于眾為興AR6520機(jī)器人與AVS視覺定位的不同工件分揀系統(tǒng)研究
2019-09-10 07:22:44周堯鑫
河南科技 2019年19期
周堯鑫
摘 要:本文通過眾為興AR6520四軸機(jī)器人與AVS視覺定位系統(tǒng),以以太網(wǎng)通信的方式,利用ADTVision視覺軟件對不同圖形標(biāo)注的工件進(jìn)行識(shí)別,并用機(jī)器人進(jìn)行靜態(tài)抓取分揀。
關(guān)鍵詞:機(jī)器人;視覺;以太網(wǎng);ADTVision
中圖分類號(hào):TP241;TP391.41 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1003-5168(2019)19-0038-03
Abstract: In this paper, by means of Ethernet communication between the 4-axis AR6520 robot and AVS visual positioning system, ADTVision visual software was used to identify the workpiece marked by different graphics, and the robot was used for static fetching and sorting.
Keywords: robotics;vision;Ethernet;ADTVision.
機(jī)器人視覺技術(shù)是指智能相機(jī)和計(jì)算機(jī)相結(jié)合,以模擬人類的視覺功能。這一技術(shù)在3C領(lǐng)域①、汽車零部件的生產(chǎn)、制藥等領(lǐng)域有著日益廣泛的應(yīng)用。SCARA(Selective Compliance Assembly Robot Arm)②機(jī)器人因具有較高的速度、精度、高度以及安裝空間小、設(shè)計(jì)自由度大等優(yōu)點(diǎn)而得到大規(guī)模應(yīng)用。目前,應(yīng)用于裝配線上的工業(yè)機(jī)器人大多是通過示教操作來完成機(jī)器人的動(dòng)作,這樣的生產(chǎn)線柔性較差,無法滿足對柔性生產(chǎn)系統(tǒng)③的要求,即實(shí)現(xiàn)對物料的識(shí)別和定位抓取。因此,要使機(jī)器人順利并且高效地完成工作任務(wù),則需要引入機(jī)器人視覺技術(shù)以完成對工作目標(biāo)的識(shí)別及定位。
1 任務(wù)控制要求
本文主要研究如何利用AVS視覺定位系統(tǒng)分辨不同圖案的工件,并由機(jī)器人完成對不同圖案工件的分揀。
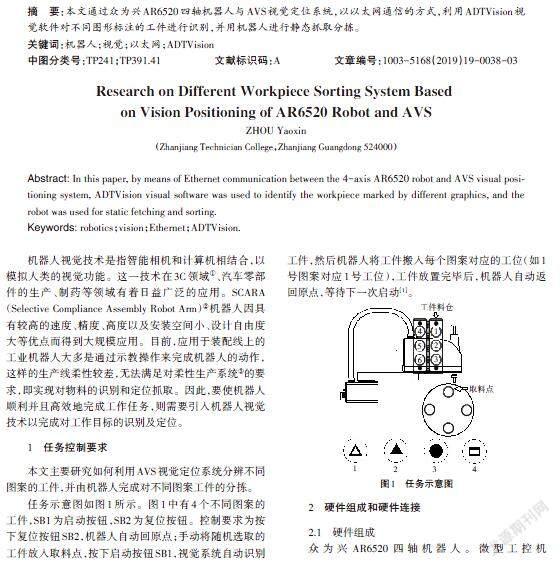
任務(wù)示意圖如圖1所示。圖1中有4個(gè)不同圖案的工件,SB1為啟動(dòng)按鈕,SB2為復(fù)位按鈕。控制要求為按下復(fù)位按鈕SB2,機(jī)器人自動(dòng)回原點(diǎn);手動(dòng)將隨機(jī)選取的工件放入取料點(diǎn),按下啟動(dòng)按鈕SB1,視覺系統(tǒng)自動(dòng)識(shí)別工件,然后機(jī)器人將工件搬入每個(gè)圖案對應(yīng)的工位(如1號(hào)圖案對應(yīng)1號(hào)工位),工件放置完畢后,機(jī)器人自動(dòng)返回原點(diǎn),等待下一次啟動(dòng)[1]。
2 硬件組成和硬件連接
2.1 硬件組成
眾為興AR6520四軸機(jī)器人。微型工控機(jī)AMC2000E:攝像機(jī)通過網(wǎng)口和主機(jī)進(jìn)行數(shù)據(jù)交換;信號(hào)的輸入、輸出控制及攝像機(jī)的供電均由I/O接口實(shí)現(xiàn);指示燈用于指示攝像機(jī)的工作狀態(tài)。MER系列相機(jī):GIGE千兆網(wǎng),500萬像素,1 628(H)×1 236(V),cCMOS類型,幀率為14fps,外部觸發(fā)或軟觸發(fā),工作電壓12V。Computar鏡頭:12mm,1∶1.4,2/3定焦。平面LED光源。顯示器、鼠標(biāo)、鍵盤、點(diǎn)動(dòng)按鈕。
2.2 硬件連接
將視覺控制器連接到24V開關(guān)電源上,連接好相機(jī)的電源線、I/O控制線(由機(jī)器人外部觸發(fā))和千兆網(wǎng)線[2]。相機(jī)的千兆網(wǎng)線必須連接到相機(jī)專用千兆網(wǎng)口中(GbE3口),視覺控制器與機(jī)器人控制器間用普通網(wǎng)線連接。顯示器連接到顯示器接口,鍵盤、鼠標(biāo)連接到USB口。控制按鈕SB1、SB2分別連接到機(jī)器人控制器的數(shù)字輸入端IN1、IN2。
3 軟件組成
本項(xiàng)目所需的軟件有相機(jī)驅(qū)動(dòng)、加密狗驅(qū)動(dòng)、ADTvision和LUA機(jī)器人程序編輯調(diào)試[3]。
3.1 相機(jī)驅(qū)動(dòng)設(shè)置
雙擊啟動(dòng)桌面上的
如果網(wǎng)卡IP地址和相機(jī)地址不在同一網(wǎng)段時(shí),相機(jī)IP地址會(huì)以紅色顯示。此時(shí),可以修改網(wǎng)卡的IP地址,也可以直接在該界面修改相機(jī)的IP地址,必須保證網(wǎng)卡IP地址和相機(jī)IP地址的前3個(gè)數(shù)字段一致,最后一個(gè)可以不同。修改好IP地址后,相機(jī)的IP地址如果以黑色顯示則表示修改成功,此時(shí)點(diǎn)擊保存設(shè)置就可以退出該程序。
同理,視覺控制器與機(jī)器人間普通網(wǎng)口的IP地址也必須在同一網(wǎng)段內(nèi),既可以在視覺控制器的網(wǎng)絡(luò)連接中修改,也可以修改機(jī)器人的IP地址,以保證兩個(gè)IP地址在同一網(wǎng)段中。
在本任務(wù)中,筆者使用相機(jī)(192.168.1.112)和機(jī)器人(192.168.0.123)的默認(rèn)IP地址,將控制器中與相機(jī)關(guān)聯(lián)的IP地址設(shè)置為192.168.1.10,與機(jī)器人關(guān)聯(lián)的IP設(shè)置為192.168.0.10。
3.2 視覺系統(tǒng)的圖像采集
視覺系統(tǒng)的作用是將被攝取目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號(hào);圖像系統(tǒng)對這些信號(hào)進(jìn)行各種運(yùn)算以抽取目標(biāo)的特征,進(jìn)而根據(jù)判別的結(jié)果來控制現(xiàn)場的設(shè)備動(dòng)作。
3.2.1 ADTvision軟件界面。ADTvision軟件界面上邊為工具欄,左邊為工具箱,中間為作業(yè)流程區(qū)。
工具箱共有以下4大類。圖像工具用于圖像采集、存儲(chǔ)和相機(jī)參數(shù)設(shè)置等;定位工具用于模板操作以及設(shè)置定位算法參數(shù);標(biāo)定工具將像素坐標(biāo)轉(zhuǎn)化成用戶坐標(biāo);通信工具設(shè)置串口和網(wǎng)口參數(shù),與外部設(shè)備進(jìn)行通信。
創(chuàng)建作業(yè)流程時(shí),根據(jù)實(shí)際工作需要,用鼠標(biāo)拖動(dòng)工具箱中相應(yīng)的工具到流程列表即可,右鍵菜單中可以刪除不需要的工具。一般情況下,只需要采集圖像、邊緣定位、坐標(biāo)定位和以太網(wǎng)4個(gè)工具即可。本任務(wù)中需要選取采集圖像、區(qū)域定位、邊緣定位、以太網(wǎng)4個(gè)工具。
3.2.2 以太網(wǎng)設(shè)置。當(dāng)視覺控制器作為服務(wù)器時(shí),需要設(shè)置正確的服務(wù)器IP地址。此時(shí),需要將視覺控制器中普通網(wǎng)口的IP地址設(shè)置到這里,并且要先打開網(wǎng)口,外部設(shè)備才能連接到服務(wù)器進(jìn)行通信,主要參數(shù)設(shè)置如下。服務(wù)器IP:192.168.0.123;服務(wù)器端口:110;協(xié)議類型:UDP;連接模式:客戶端;站號(hào):1;本地IP:192.168.0.10;本地端口:2000。
無論是串口通信還是網(wǎng)口通信,在軟觸發(fā)時(shí),如果外部設(shè)備發(fā)送的是“[0]”命令,則視覺軟件執(zhí)行一次0號(hào)相機(jī)的定位操作,并將定位結(jié)果傳回給外部設(shè)備;如果外部設(shè)備發(fā)送的是“[1]”命令,則視覺軟件執(zhí)行一次1號(hào)相機(jī)的定位操作,并將定位結(jié)果傳回給外部設(shè)備。
3.2.3 采集圖像及其設(shè)置。采集圖像主要是通過設(shè)置、調(diào)節(jié)攝像機(jī)以獲取清晰的現(xiàn)場圖片。
將“采集圖像”拖取到作業(yè)流程界面,“打開設(shè)備”進(jìn)行參數(shù)設(shè)置,然后“保存參數(shù)”并“加載參數(shù)”。使用硬件觸發(fā)定位,觸發(fā)模式為on。靜態(tài)IP設(shè)置為相機(jī)IP,即192.168.1.112。
3.2.4 邊緣定位創(chuàng)建模板。邊緣定位創(chuàng)建模板主要是根據(jù)目標(biāo)的形狀輪廓來尋找定位目標(biāo),適合用來尋找有任意旋轉(zhuǎn)角度、任意縮放比例、任意對比度反差和局部遮擋的目標(biāo),不適合尋找邊緣模糊和有噪聲的目標(biāo)。
點(diǎn)擊工具欄中“連續(xù)采集”按鈕<C:\Users\hnkj\Desktop\河南科技(創(chuàng)新驅(qū)動(dòng))2019年第19期_103998\Image\image3_1.png>,將模板對象放在相機(jī)下,進(jìn)行圖像連續(xù)采集。將“邊緣定位”拖取到作業(yè)流程界面。打開“邊緣定位”設(shè)置窗口,其中“模版匹配最低分”表示圖像中找到的目標(biāo)和模版的匹配率,可設(shè)“0—100”,設(shè)置過低會(huì)造成誤識(shí)別,設(shè)置過高會(huì)造成識(shí)別不了,一般設(shè)置為70—80。
創(chuàng)建模板,輸入模板名稱,雙擊模板在“邊緣模板學(xué)習(xí)”窗口設(shè)置,選擇“單ROI模式”和“圓形ROI”,用圓形框選取瓶蓋外緣形成清晰的綠色邊緣為所需的模板,點(diǎn)擊“創(chuàng)建模板”完成模板創(chuàng)建的流程。
經(jīng)分析,本任務(wù)4個(gè)圖形中除了空心三角形和實(shí)心三角形的輪廓比較相似,其他圖形相互的輪廓都有很大區(qū)別。所以,根據(jù)“邊緣定位”工具特性,空心三角形和空心長方形使用“邊緣定位”工具創(chuàng)建模板,實(shí)心圓形可以用“邊緣定位”也可用“區(qū)域定位”。本任務(wù)中實(shí)心圓形使用“邊緣定位”工具創(chuàng)建模板,模板名為對應(yīng)的圖形編號(hào)。
3.2.5 區(qū)域定位創(chuàng)建模板。區(qū)域定位模板主要是根據(jù)目標(biāo)區(qū)域的像素灰度來尋找定位目標(biāo),適合用來尋找有噪聲和污損的目標(biāo),不適合尋找任意旋轉(zhuǎn)角度和縮放比例的目標(biāo),通常情況下都會(huì)需要任意的角度信息。
區(qū)域定位模板的創(chuàng)建步驟與邊緣定位模板的創(chuàng)建基本相同,只是在用圓形框選取模板區(qū)域時(shí),區(qū)域模板圓形框必須包含瓶蓋邊沿,形成的綠色邊緣為所需模板。
經(jīng)分析,本任務(wù)中的實(shí)心三角形使用“區(qū)域定位”工具創(chuàng)建模板,以便于與空心三角形進(jìn)行區(qū)分,模板名為對應(yīng)的圖形編號(hào),創(chuàng)建模板。
3.3 相機(jī)作業(yè)設(shè)置
選擇“絕對位置”,勾選“模板名稱”。
3.4 AR8520機(jī)器人參數(shù)設(shè)定
3.4.1 視覺配置。在機(jī)器人工程目錄下添加視覺,進(jìn)入“視覺配置”,選擇“CAM0”相機(jī),“UDP”網(wǎng)絡(luò)模式,IP為視覺控制器中與機(jī)器人連接的IP,網(wǎng)絡(luò)觸發(fā)格式要與“相機(jī)作業(yè)設(shè)置”中輸出內(nèi)容勾選的一致。
3.4.2 編寫機(jī)器人程序并加載。打開“LUA機(jī)器人程序編輯”軟件,編寫程序并保存后,使用示教器將保存的程序加載到機(jī)器人控制器中,并對相關(guān)位置點(diǎn)進(jìn)行示教。
4 總結(jié)
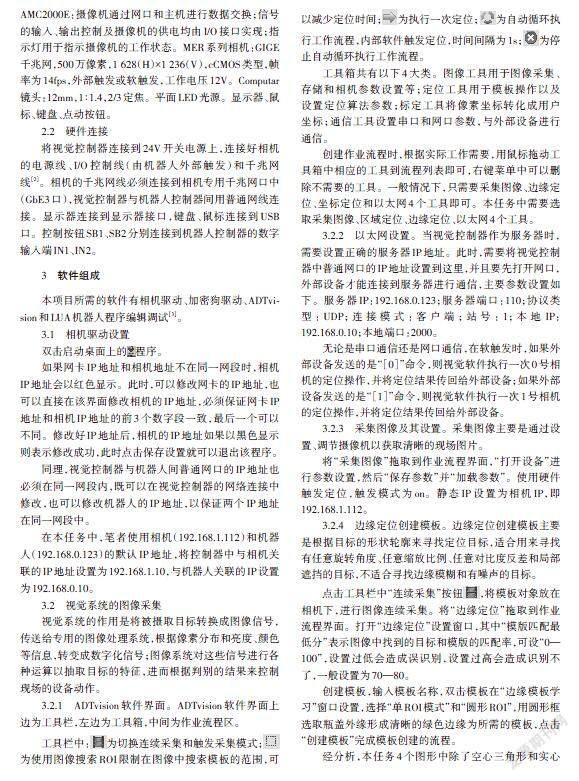
本任務(wù)主要由視覺控制器、相機(jī)和機(jī)器人組成,視覺控制器作為服務(wù)器,貫通著三者間的通信連接。工作過程如圖2所示。
本任務(wù)的設(shè)計(jì)內(nèi)容可以分為三部分:第一部分,相機(jī)和機(jī)器人與視覺控制器之間的以太網(wǎng)通信設(shè)置;第二部分,不同圖形模板的創(chuàng)建;第三部分,機(jī)器人程序設(shè)計(jì)。
在視覺控制器中設(shè)置IP地址時(shí),由于控制器既與機(jī)器人連接又與相機(jī)連接,因此,控制器中有2個(gè)“本地連接”,其中“本地連接”狀態(tài)中“速度”為100.0Mbps的為與機(jī)器人連接端口,“速度”為1.0Gbps的為與相機(jī)連接端口。這主要是因?yàn)榭刂破髦邢鄼C(jī)專用網(wǎng)口為千兆網(wǎng)口。
在機(jī)器人“視覺配置”中,網(wǎng)絡(luò)觸發(fā)格式要與網(wǎng)絡(luò)接收格式對應(yīng)。
在創(chuàng)建圖像模板采集前,應(yīng)先完成“以太網(wǎng)”設(shè)置并將網(wǎng)口打開,因?yàn)樵诒救蝿?wù)中,筆者將視覺控制器作為服務(wù)器。
注釋:
①所謂3C就是電腦Computer、通信Communication和消費(fèi)性電子Consumer Electronic。
②SCARA(Selective Compliance Assembly Robot Arm,選擇順應(yīng)性裝配機(jī)器手臂)是一種圓柱坐標(biāo)型的特殊類型的工業(yè)機(jī)器人,最適用于平面定位。
③柔性制造是指在計(jì)算機(jī)支持下,能適應(yīng)加工對象變化的制造系統(tǒng)。
參考文獻(xiàn):
[1]何家恒.基于眾為興ar5215機(jī)械臂及avs1100視覺抓取應(yīng)用[J].科技視界,2017(6):28-29.
[2]翟敬梅,董鵬飛,張鐵.基于視覺引導(dǎo)的工業(yè)機(jī)器人定位抓取系統(tǒng)設(shè)計(jì)[J].機(jī)械設(shè)計(jì)與研究,2014(5):45-49.
[3]李亞偉.基于機(jī)器視覺的工件分揀系統(tǒng)研究[D].上海:上海工程技術(shù)大學(xué),2016.
