博物館環(huán)境中基于Wi-Fi的實(shí)時(shí)定位系統(tǒng)設(shè)計(jì)
2019-09-10 07:22:44徐方施智勇鮑賢清
科學(xué)教育與博物館 2019年2期
關(guān)鍵詞:博物館
徐方 施智勇 鮑賢清





摘 要 為了在觀眾參觀過(guò)程中提供個(gè)性化的信息和服務(wù),博物館需要通過(guò)技術(shù)手段對(duì)每個(gè)觀眾進(jìn)行實(shí)時(shí)定位。針對(duì)博物館環(huán)境,我們?cè)O(shè)計(jì)了一個(gè)基于Wi-Fi的實(shí)時(shí)定位系統(tǒng):將所有的位置測(cè)量單元設(shè)備都設(shè)定為時(shí)間同步,再根據(jù)各個(gè)設(shè)備檢測(cè)到的信號(hào),得出觀眾手機(jī)發(fā)射信號(hào)的位置和時(shí)間。運(yùn)用仿真實(shí)驗(yàn)驗(yàn)證,發(fā)現(xiàn)只要布置足夠的位置測(cè)量單元設(shè)備,該系統(tǒng)的位置精度可達(dá)厘米級(jí),時(shí)間精度可達(dá)皮秒級(jí),符合博物館場(chǎng)景的使用要求。
關(guān)鍵詞 博物館 實(shí)時(shí)定位 時(shí)間同步 行動(dòng)熱點(diǎn)
0 引言
當(dāng)今社會(huì)已經(jīng)進(jìn)入信息時(shí)代,數(shù)字技術(shù)的網(wǎng)絡(luò)化趨勢(shì)逐步滲透到各行各業(yè)中。在這一背景下,博物館應(yīng)當(dāng)與時(shí)俱進(jìn),利用高新技術(shù),更好地創(chuàng)新公共服務(wù)工作。那么,如何合理規(guī)劃路線?如何有效疏導(dǎo)人流、維持秩序?對(duì)此,基于Wi-Fi的實(shí)時(shí)定位系統(tǒng)或許能幫助我們。根據(jù)觀眾的手機(jī)行動(dòng)熱點(diǎn),實(shí)現(xiàn)復(fù)雜環(huán)境中的定位、監(jiān)測(cè)和追蹤任務(wù),進(jìn)而記錄參觀軌跡、分析觀眾身份,滿(mǎn)足不同類(lèi)型觀眾的不同需求,為分眾化研究提供必要的依據(jù),打造融合時(shí)態(tài)的全新體驗(yàn)空間。
1 利用Wi-Fi實(shí)時(shí)測(cè)量手機(jī)位置的工作原理
通過(guò)無(wú)線終端與無(wú)線網(wǎng)絡(luò)的配合,采集移動(dòng)手機(jī)的接入點(diǎn),實(shí)時(shí)獲取用戶(hù)的位置信息,從而達(dá)到監(jiān)控對(duì)象位置的目的。在電子地圖平臺(tái)的支持下,我們以P(X,Y,Z,T)的方式,表示目標(biāo)手機(jī)P在T時(shí)刻發(fā)送信號(hào)的三維坐標(biāo)。
如圖1所示,手機(jī)可以借助Wi-Fi接入不同位置測(cè)量單元設(shè)備。假設(shè)用戶(hù)的目標(biāo)手機(jī)P于Tm時(shí)刻在某處發(fā)出一已知信號(hào),此信號(hào)帶有時(shí)間戳,是手機(jī)執(zhí)行異步切換時(shí)發(fā)出的接入突發(fā)信號(hào),表示為P(Xm,Ym,Zm,Tm)。已知4個(gè)位置測(cè)量單元設(shè)備固定放置在A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3)、D(x4,y4,z4)。假設(shè)t1、t2、t3、t4分別為4個(gè)位置測(cè)量單元設(shè)備收到目標(biāo)手機(jī)P發(fā)射信號(hào)的時(shí)間,表示為A(x1,y1,z1,t1)、B(x2,y2,z2,t2)、C(x3,y3,z3,t3)、D(x4,y4,z4,t4)。
已知無(wú)線電波的傳播速度c為299 792 458 m/s,根據(jù)無(wú)線電波傳播時(shí)間△t,可計(jì)算節(jié)點(diǎn)間的距離d(d=c△t)。此時(shí),用戶(hù)的目標(biāo)手機(jī)P到A、B、C、D處的距離分別為d1=c(t1-Tm)、d2=c(t2-Tm)、d3=c(t3-Tm)、d4=c(t4-Tm)。則:
c2(t1-Tm)2=(x1-Xm)2+(y1-Ym)2+(z1-Zm)2
c2(t2-Tm)2=(x2-Xm)2+(y2-Ym)2+(z2-Zm)2
c2(t3-Tm)2=(x3-Xm)2+(y3-Ym)2+(z3-Zm)2
c2(t4-Tm)2=(x4-Xm)2+(y4-Ym)2+(z4-Zm)2 (1)
注:t1>Tm,t2>Tm,t3>Tm,t4>Tm。
如果目標(biāo)手機(jī)接入5個(gè)及以上位置測(cè)量單元設(shè)備,則可將二次方程組全部轉(zhuǎn)換為一次方程組,求出多組目標(biāo)節(jié)點(diǎn)P(Xm,Ym,Zm,Tm)的實(shí)時(shí)位置與時(shí)間。然后采用統(tǒng)計(jì)學(xué)中概率論的最大似然估計(jì)法,推算目標(biāo)節(jié)點(diǎn)P(Xm,Ym,Zm,Tm)的實(shí)時(shí)位置與時(shí)間的近似值。因此,目標(biāo)手機(jī)接入的位置測(cè)量單元設(shè)備越多,目標(biāo)節(jié)點(diǎn)P的測(cè)量就越精確。
2 位置測(cè)量單元設(shè)備的時(shí)間同步機(jī)制
考慮上述因素,基于Wi-Fi的實(shí)時(shí)定位系統(tǒng)運(yùn)行的關(guān)鍵在于所有位置測(cè)量單元設(shè)備的坐標(biāo)正確及時(shí)間同步。對(duì)此,我們可以通過(guò)前期的物理測(cè)量來(lái)確保坐標(biāo)正確,并通過(guò)硬件和軟件的調(diào)試來(lái)確保時(shí)間同步。
在博物館環(huán)境中,可運(yùn)用一個(gè)校正時(shí)間的位置測(cè)量單元設(shè)備,來(lái)測(cè)量并校正其他的設(shè)備。如圖2所示,假設(shè)在A處的位置測(cè)量單元設(shè)備已校正時(shí)間為t1,發(fā)出帶有t1時(shí)間戳的信號(hào)。當(dāng)B處的位置測(cè)量單元設(shè)備收到的時(shí)間為t'2(未校正),假設(shè)已校正的時(shí)間為t2,則:
c2(t2-t1)2=(x1-x2)2+(y1-y2)2+(z1-z2)2 (2)
注:t2>t1
[圖2 位置測(cè)量單元設(shè)備的時(shí)間同步機(jī)制]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-2.tif>
根據(jù)(2)式計(jì)算已校正的時(shí)間t2,其時(shí)間誤差為△t=t2-t'2。最后,將B處的位置測(cè)量單元設(shè)備的時(shí)間加上時(shí)間誤差△t,即可時(shí)間同步B處與A處的位置測(cè)量單元設(shè)備。同理,可時(shí)間同步C、D處與A處的位置測(cè)量單元設(shè)備,從而達(dá)到所有位置測(cè)量單元設(shè)備的時(shí)間同步。
3 位置測(cè)量單元設(shè)備的時(shí)間測(cè)量精度
時(shí)間同步服務(wù)器是一種高科技智能化的時(shí)間服務(wù)器,其從GPS衛(wèi)星上獲取標(biāo)準(zhǔn)時(shí)鐘信號(hào),將這些信息在網(wǎng)絡(luò)中傳輸,達(dá)到與標(biāo)準(zhǔn)時(shí)間源同步。目前,應(yīng)用較為廣泛的解決方案是網(wǎng)絡(luò)測(cè)量和控制系統(tǒng)的精密時(shí)鐘同步協(xié)議標(biāo)準(zhǔn)(IEEEl588),能夠在報(bào)文發(fā)送和接收時(shí)精確標(biāo)記時(shí)間戳,其時(shí)間精度可達(dá)8 ns。然而,對(duì)于無(wú)線電波來(lái)說(shuō),在8 ns內(nèi)仍可傳播2.4 m,故我們決定針對(duì)室內(nèi)環(huán)境,從硬件和軟件兩個(gè)角度重新設(shè)計(jì),以提高時(shí)間精度,減少位置誤差。
3.1 測(cè)量設(shè)備的參數(shù)設(shè)定
要讓所有位置測(cè)量單元設(shè)備的時(shí)間同步,就必須事先測(cè)量位置測(cè)量單元設(shè)備本身接收信號(hào)后處理所需的時(shí)間。如圖3所示,A、B、C為三個(gè)位置測(cè)量單元設(shè)備,已知A設(shè)備與B設(shè)備的間隔為SAB,A設(shè)備與C設(shè)備的間隔為SAC,B設(shè)備與C設(shè)備的間隔為SBC。假設(shè)A設(shè)備發(fā)出信號(hào),B設(shè)備收到信號(hào),并將信號(hào)發(fā)回,再由A設(shè)備接收,整個(gè)過(guò)程所用的時(shí)間為tAB;A設(shè)備發(fā)出信號(hào),C設(shè)備收到信號(hào),并將信號(hào)發(fā)回,再由A設(shè)備接收,整個(gè)過(guò)程所用的時(shí)間為tAC;B設(shè)備發(fā)出信號(hào),C設(shè)備收到信號(hào),并將信號(hào)發(fā)回,再由B設(shè)備接收,整個(gè)過(guò)程所用的時(shí)間為tBC。測(cè)得A設(shè)備接收信號(hào)后處理所需的時(shí)間為tA,B設(shè)備接收信號(hào)后處理所需的時(shí)間為tB,C設(shè)備接收信號(hào)后處理所需的時(shí)間為tC。
[圖3 測(cè)量設(shè)備的參數(shù)設(shè)定]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-3.tif>
根據(jù)測(cè)量的時(shí)間關(guān)系,可列出方程組(3):
tA+tB
+=tAB
tA+tC
+=tAC
tB+tC
+=tBC ?(3)
通過(guò)解方程組(3),并精確測(cè)量三個(gè)已知相隔距離的位置測(cè)量單元設(shè)備收發(fā)信號(hào)所需的時(shí)間,就能計(jì)算出位置測(cè)量單元設(shè)備本身接收信號(hào)后處理所需的時(shí)間tA、tB、tC。
3.2 精確測(cè)量信號(hào)到達(dá)時(shí)間的硬件設(shè)計(jì)
如圖4所示,ARM處理器產(chǎn)生一個(gè)與時(shí)鐘同步的電脈沖,觸發(fā)發(fā)射器發(fā)射無(wú)線電波,同時(shí)電脈沖通過(guò)延時(shí)電路送入到D觸發(fā)器的輸入端CLK;發(fā)射器發(fā)射的無(wú)線電波到達(dá)目標(biāo),經(jīng)過(guò)目標(biāo)處理后,發(fā)射無(wú)線電波,返回并被接收端送入到D觸發(fā)器的輸入端D。通過(guò)改變延遲時(shí)間,使得去往D觸發(fā)器的CLK、D輸入端的信號(hào)同時(shí)到達(dá),則可認(rèn)為無(wú)線電波從發(fā)射到接收的總時(shí)間等于延遲的時(shí)間。
[圖4 硬件設(shè)計(jì)]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-4.tif>
3.3 精確測(cè)量信號(hào)到達(dá)時(shí)間的軟件設(shè)計(jì)
首次測(cè)量時(shí),ARM處理器控制發(fā)射器發(fā)射無(wú)線電波,并發(fā)出一個(gè)與時(shí)鐘同步的啟動(dòng)脈沖“start”,同時(shí)對(duì)與時(shí)鐘同步的100 MHz脈沖進(jìn)行計(jì)數(shù)。經(jīng)過(guò)一段時(shí)間后,當(dāng)ARM處理器收到返回的無(wú)線電波,就發(fā)出結(jié)束脈沖“stop”,并立即停止計(jì)數(shù)。則無(wú)線電波往返的總時(shí)間t=m×T,其中T為脈沖周期10 ns。因此,通過(guò)記錄無(wú)線電波整個(gè)往返過(guò)程的脈沖個(gè)數(shù)m,可計(jì)算出時(shí)間t。
不過(guò)利用脈沖法,可能會(huì)產(chǎn)生一個(gè)脈沖周期10 ns的時(shí)間誤差,從而造成約3 m的位置誤差。對(duì)此,我們采用MC100EP195可編程延遲芯片,其延遲時(shí)間范圍為0 ps~10 000 ps,延遲時(shí)間間隔為10 ps的整數(shù)倍。
如圖5所示,在初始狀態(tài),將延遲芯片的延遲時(shí)間間隔設(shè)為0 ps,發(fā)出無(wú)線電波后,CLK端的輸入脈沖會(huì)比D端的返回電波早到,此時(shí)輸入信號(hào)D=0,輸出信號(hào)Q=0。
[圖5 初始時(shí)的脈沖]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-5.tif>
如圖6所示,當(dāng)ARM處理器產(chǎn)生m×10 ns的延時(shí),利用延遲芯片按10 ps的步長(zhǎng),每次設(shè)置延遲時(shí)間間隔t2后,再重新測(cè)量,直到輸出信號(hào)Q=1。
[圖6 脈沖信號(hào)同時(shí)到達(dá)時(shí)]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-6.tif>
則無(wú)線電波從發(fā)射(“start”)到接收(“stop”)之間的時(shí)間間隔t總=m×T+t2。這樣,在理論上測(cè)量的時(shí)間精度可達(dá)10 ps,位置精度相當(dāng)于3 mm。
4 基于Wi-Fi的實(shí)時(shí)定位系統(tǒng)
首先,制作博物館內(nèi)部的電子地圖。接著,在電子地圖中標(biāo)出所有的位置測(cè)量單元設(shè)備,并確定時(shí)間的同步。如圖7所示,通過(guò)接收觀眾手機(jī)發(fā)出的信號(hào),傳送到后臺(tái)的數(shù)據(jù)庫(kù),并計(jì)算出當(dāng)時(shí)的位置和時(shí)間。在博物館環(huán)境中,人的步行速度一般不會(huì)太快,約為1.25 m/s。假設(shè)每隔10 ms,手機(jī)發(fā)送一次信號(hào),觀眾移動(dòng)的距離每次僅為1.25 cm,所以基本可視為能夠?qū)崟r(shí)取得手機(jī)的位置信息。而有了時(shí)間參數(shù),就能捕捉目標(biāo)對(duì)象的運(yùn)動(dòng)軌跡,再由業(yè)務(wù)營(yíng)運(yùn)支撐系統(tǒng)為各位觀眾提供相應(yīng)的推送服務(wù),如展品介紹、活動(dòng)宣傳等。
[圖7 基于Wi-Fi的實(shí)時(shí)定位系統(tǒng)]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-7.tif>
5 仿真實(shí)驗(yàn)的驗(yàn)證
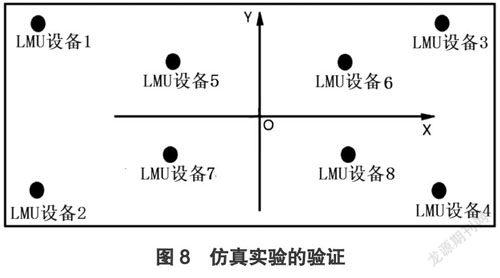
如圖8所示,選取室內(nèi)環(huán)境,設(shè)定區(qū)域面積長(zhǎng)22 m、寬12 m,放置高度為1 m的8個(gè)位置測(cè)量單元設(shè)備。以位置測(cè)量單元設(shè)備1的時(shí)間為基準(zhǔn),同步其他設(shè)備。假設(shè)0 cm的位置對(duì)應(yīng)整個(gè)區(qū)域的中心,將1個(gè)待定位目標(biāo)手機(jī)放置在由計(jì)算機(jī)控制的電動(dòng)平移臺(tái)上,高度設(shè)為1 m,按照正常人的步行速度,從0 cm開(kāi)始移動(dòng),每100 ms移動(dòng)一次,每次移動(dòng)12.5 cm,直到500 cm。
[圖8 仿真實(shí)驗(yàn)的驗(yàn)證]<O:\Macfile-f\CY\2019年\科學(xué)教育與博物館\2019-2\徐方-8.tif>
然后,測(cè)量目標(biāo)在X軸位置移動(dòng)時(shí)的位置誤差和時(shí)間誤差。每組實(shí)驗(yàn)如此重復(fù)10次,取平均值。由于觀眾身高差異等因素,△Z的誤差在厘米級(jí),大致可確定觀眾所在的樓層,所以△Z的誤差可以忽略不計(jì)。由表1可知,△X與△Y相差不大,位置誤差在(-3.46 cm,3.82 cm)的范圍內(nèi),造成的時(shí)間誤差在(-170 ps,174 ps)的范圍內(nèi)。
6 結(jié)論
針對(duì)博物館環(huán)境,我們?cè)O(shè)計(jì)了一個(gè)基于Wi-Fi的實(shí)時(shí)定位系統(tǒng),通過(guò)監(jiān)測(cè)并追蹤觀眾的手機(jī)位置及運(yùn)動(dòng)軌跡,提供各種便捷、多元的服務(wù),以達(dá)到對(duì)展品的一種時(shí)間與空間敘事。運(yùn)用仿真實(shí)驗(yàn)驗(yàn)證,發(fā)現(xiàn)只要布置足夠的位置測(cè)量單元設(shè)備,該系統(tǒng)的位置精度可達(dá)厘米級(jí),時(shí)間精度可達(dá)皮秒級(jí),符合博物館場(chǎng)景的使用要求。
參考文獻(xiàn)
[1]施智勇.一種基于測(cè)距的無(wú)線傳感網(wǎng)絡(luò)的高精度定位改進(jìn)算法[D].上海:上海師范大學(xué)信息與機(jī)電工程學(xué)院,2018.
[2]王辰,劉宇馳,金舟.基于無(wú)線定位的個(gè)性化導(dǎo)覽關(guān)鍵技術(shù)及其在博物館中的應(yīng)用[J].計(jì)算機(jī)應(yīng)用研究,2016(5):1419-1423.
[3]沈曉峰,王建.基于WiFi的實(shí)時(shí)定位技術(shù)在博物館中的應(yīng)用[J].計(jì)算機(jī)與網(wǎng)絡(luò),2015(20):54-57.
[4]施智勇,潘曉聲,張謙.利用延時(shí)法進(jìn)行高精度脈沖激光測(cè)距[J].光學(xué)精密工程,2014(2):252-258.
[5]朱中一.基于WiFi的室內(nèi)定位技術(shù)在博物館的應(yīng)用[J].軟件產(chǎn)業(yè)與工程,2013(3):38-41.
Design of the real-time positioning system based on Wi-Fi in museums// XU Fang, SHI Zhiyong, BAO Xianqing
First-Author's Address College of Education in Shanghai Normal University, E-mail: xufang@shnu.edu.cn
Abstract In order to provide the public with personalized information and services during the visit, museums need to locate each visitor in real time through technical means. Based on Wi-Fi, a real-time positioning system is designed. Firstly, all position measurement units are synchronized, and the time and position of the signal transmitted are calculated according to the signal sent by the visitors' mobile phones. According to the simulation experiment, as enough position measuring units are arranged, the position accuracy of the system can reach centimeters, and the time precision of the system can reach picoseconds, which meets the use requirements of the museum scene.
Keywords museums, real-time location, time synchronization, Wi-Fi
猜你喜歡
金橋(2022年6期)2022-06-20 01:35:58
好日子(2022年3期)2022-06-01 06:22:06
今日農(nóng)業(yè)(2022年4期)2022-06-01 06:12:38
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:44
金橋(2022年2期)2022-03-02 05:43:00
金橋(2022年2期)2022-03-02 05:42:52
小太陽(yáng)畫(huà)報(bào)(2020年4期)2020-04-24 09:28:22
走向世界(2018年11期)2018-12-26 01:12:44
中外文摘(2017年20期)2017-09-30 06:40:48
童話(huà)王國(guó)·原創(chuàng)版(2016年4期)2016-11-23 16:06:06