基于LabVIEW的數據融合火災識別模型應用
2019-09-03 11:33:46張嘉琪王浩杰
實驗室研究與探索 2019年8期
關鍵詞:融合
王 晨, 張嘉琪, 王 麗, 王浩杰
(天津理工大學 環境科學與安全工程學院,天津 300384)
0 引 言
隨著城市化進程的不斷加快,各類建筑的數量不斷增加,高度和規模不斷擴大。火災發生的頻率也逐漸增高,造成的人員傷亡和經濟損失十分嚴重。對火災進行及時準確的探測和預防至關重要。但現有的火災預警系統存在諸多問題,火災探測器的種類單一,僅僅依靠簡單的閾值判斷對監測信息進行識別,如通過監測環境溫度、可燃氣體濃度等參數識別火災[1-3],但是實際火災預警系統中采用的大都為高靈敏度傳感器,若采用單一閾值判斷,極易受到周圍環境的干擾,導致高虛警率。如果降低傳感器的靈敏度或者傳感器損壞,在應用時傳感器反應遲鈍或無反應,則會導致高漏報率[4-6]。
傳統火災預警系統無法滿足復雜火災報警的需要,筆者提出基于多傳感器數據融合的火災識別方法,選取煙霧、溫度、CO傳感器進行火災監測,利用神經網絡及引入可靠度作為數據權重的證據理論(Dempster-Shafer,D-S)等建立火災識別模型,分別對各類傳感器進行數據融合,具有高靈敏度和抗干擾能力。同時,采用LabVIEW虛擬儀器管理平臺開發采集、處理、識別功能,實現對采集多傳感器數據統一管理及識別系統的自動化,提高火災識別的及時性、準確性[7-8]。
1 火災模型總體設計
火災識別模型總體流程如圖1所示,對各傳感器數據進行采集,首先判別是否為同類傳感器,若是同類傳感器采用BP神經網絡先一步進行數據融合,然后將得到的融合結果與其他異類傳感器數據用D-S進行融合,由輸出結果判定是否發生火災。

圖1 火災識別模型總體設計
2 數據融合在虛擬儀器中的實現
2.1 LabVIEW虛擬儀器
LabVIEW是一種圖形化的編輯程序語言,用程序圖或框圖取代程序代碼,提供實現儀器編程和數據采集系統的便捷途徑,能根據用戶需要定義具備各種功能的儀器,圖片化的界面使整個程序井然有序,生動清晰,使用該技術設計、測試、研究、計算及實現儀器系統功能,可以提高工作效率[9]。
2.2 神經網絡在虛擬儀器中的實現
神經網絡第1階段為訓練階段,隨機選取大量樣本,將其作為神經網絡的輸入和輸出。通過大量樣本,首先信號正向傳播,每層節點的輸出都只影響下層節點的輸入,選取Sigmoid型函數[10]作為神經網絡內部輸入層到隱層和隱層到輸出層之間的傳遞函數:
Ct={exp[-(∑bj·Vjt-γt)·r]+1}-1
(1)
式中:bj為隱層各神經元輸入;Vjt為隱層-輸出層連接權值;r為Sigmoid型函數的修正系數;γt為輸出層的閾值;Ct為輸出值。圖2為隱層到輸出層的Sigmoid型函數在LabVIEW虛擬儀器中的實現。如果輸出層得出數據與期望輸出值的最大誤差大于設定允許誤差值則將反向計算,即相對誤差值沿原傳輸路徑返回,通過修改各神經元的權值和閾值繼續訓練,進行輸出值與期望值的比較使誤差信號最小,最終小于系統設定的相對誤差值,或達到訓練步數的設定值,則訓練結束得到最終權值及閾值[11]。圖3為反向計算過程中權值和閾值修正過程在LabVIEW虛擬儀器中的實現。

圖2 隱層-輸出層傳遞程序圖

圖3 權值及閾值修正程序圖
第2階段為工作階段,可以設定訓練樣本、訓練次數、最大相對誤差等參數,能清楚地觀察到訓練樣本的計算結果,也可根據訓練好的結果輸入新的值,即可得到相對應的輸出量。采用LabVIEW虛擬儀器開發的神經網絡控制前面板如圖4所示。

圖4 神經網絡控制前面板圖
2.3 基于可靠度的D-S證據在虛擬儀器中的實現
針對傳統D-S,若證據完全沖突時無法合成或高度沖突會導致出現與常理相悖結果的特點,引入可靠度的量化值作為權重[12],對各基本概率分配進行加權平均,再使用D-S融合規則進行融合。
首先設定火災發生所有情況的集合為識別框Ω,Ω={A1,A2,A3},集合內的每個元素代表火災發生的一種情況,通常為有火災、無火災、不確定,集合內的各個元素互斥。其次結合模糊理論,用高斯型隸屬度函數表示各個傳感器監測值與火災基本概率分配的信任度函數[13],圖5為各傳感器信任度函數在LabVIEW虛擬儀器中的實現。


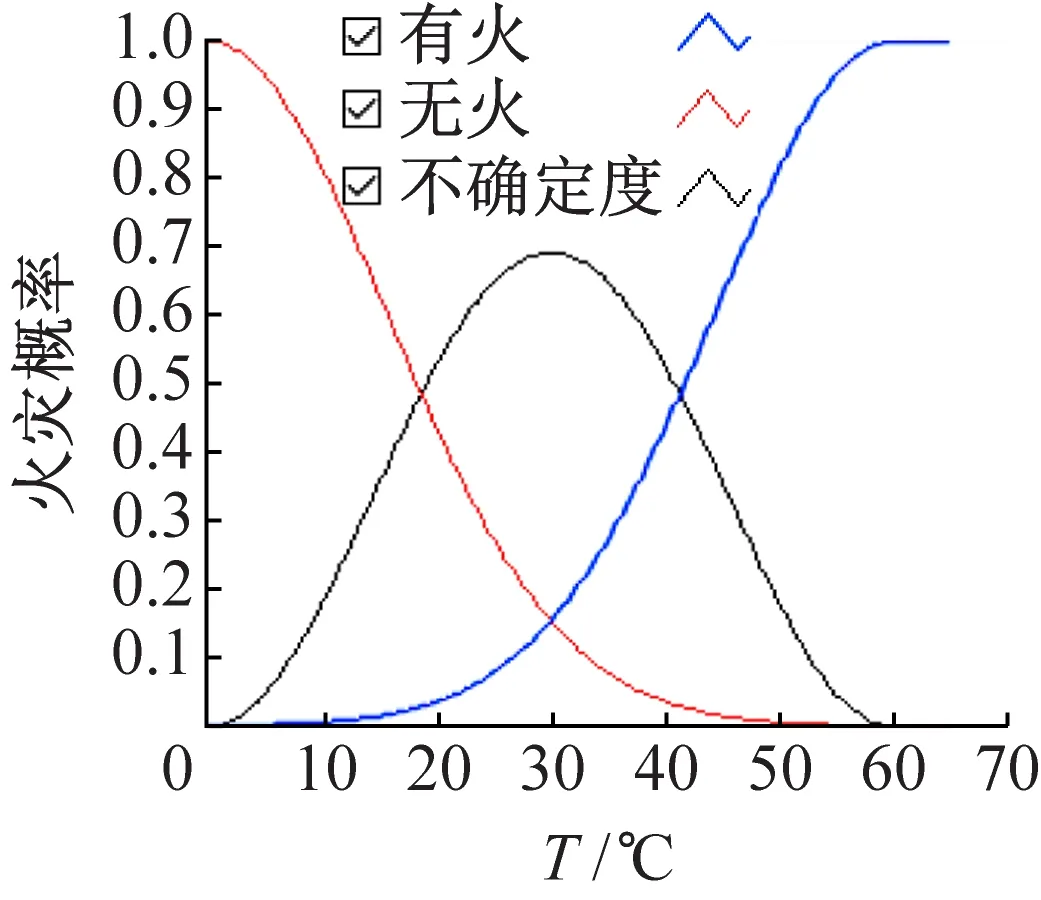
圖5 各個傳感器輸出信任度函數
然后引入可靠度作為權值。傳感器的可靠度通過數據監相互支持度進行量化,支持度是相似度的函數,一個傳感器基本概率分配與其他傳感器的相似度越高,則支持度越高[14]。
相似度可通過相關系數法得到,傳感器m1與mj傳感器間相似度為:
(2)
式中:Ai為火災發生的第i種情況;mj(Ai)為第j個傳感器對第i種情況的基本概率分配。sim(m1,mi)為m1傳感器與mi傳感器之間的相似度。相似度的取值范圍為[0,1],表示兩個傳感器基本概率分配完全相同或完全沖突。傳感器m1的支持度與可靠度[15]為
(3)

(4)
式中:sup(mi)為mi傳感器的支持度,Dcrd(mi)為mj傳感器的可靠度。最后用D-S進行融合。將可靠度作為傳感器的權值,對基本概率分配進行加權平均,得到修正后的不同火災情況的基本概率分配為{m′(A1),m′(A2),m′(A3)}。對修正后的基本概率分配進行n-1次D-S數據融合,其融合規則如下式所示[16]:
(5)

(6)
最終得出融合結果,并判斷火災是否發生。圖6為基本概率分配加權平均及融合過程在LabVIEW虛擬儀器中的實現。

(a) 基本概率分配修正程序圖

(b) D-S證據理論融合程序圖
3 應用實例及結果分析
將由煙霧、溫度、CO等傳感器組成的兩套監測系統安裝于實驗室左右屋頂正上方,在實驗室一角燃燒材料,主要分為明火燃燒和陰燃。經過多次同等條件下的燃燒實驗,得到火災初期其煙霧、CO、溫度等傳感器的測試數據,通過修正得到明火與陰燃實驗中傳感器響應曲線,如圖7所示。由響應曲線可以看出,明火情況下,火災初期燃燒不充分,溫度最先開始上升,其次CO氣體和煙霧體積分數迅速上升。隨著燃燒的繼續,CO氣體和煙霧體積分數開始降低,而溫度持續上升。陰燃情況下,火災特征不明顯,與明火情況相同溫度首先開始上升,其次煙霧體積分數迅速上升,CO氣體變化不明顯。隨著燃燒的繼續,煙霧體積分數趨于平穩,CO體積分數緩慢上升后下降,溫度持續上升。

(a) 煙霧傳感器響應

(b) CO傳感器響應

(c) 溫度傳感器響應
圖7 明火及陰燃實驗中各傳感器響應曲線
采用虛擬儀器根據信任度曲線得到明火和陰燃兩種情況下單一傳感器的火災概率和使用多傳感器數據融合得出的火災概率結果如圖8所示。從圖中可以看出,在閾值為0.5時,明火情況下煙霧傳感器、溫度傳感器、CO傳感器這3種單一傳感器最早能在40S識別火災,融合后能在33S識別火災;陰燃情況下,單一傳感器最早在143S識別火災,融合后能在131S識別火災,兩種火災情況下,融合后的火災識別都比單一傳感器火災識別更靈敏;并且單一傳感器的變化對融合后的火災識別有影響,但影響波動較小,若某一傳感器出現故障,仍能準確識別火災,抗干擾能力強。

(a) 明火情況下單一傳感器及融合火災概率

(b) 陰燃情況下單一傳感器及融合火災概率
4 結 語
本文采用神經網絡和以可靠度為權值的D-S構建的火災識別模型解決了單一傳感器虛報率和漏報率高的問題,融合后的火災識別模型更靈敏,能減少人為干擾造成的影響,采用虛擬儀器技術開發識別系統,實現了自主監測、自主融合、自主預警的目標,計算效率高、準確率高、操作簡單,能滿足市場開發及使用的需求。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38