基于CCD的循跡機(jī)器人小車模糊控制方法研究與實(shí)現(xiàn)
2019-09-02 03:28:44劉漢忠俞鵬謝秦韜
現(xiàn)代電子技術(shù) 2019年9期
劉漢忠 俞鵬 謝秦韜
摘 ?要: 設(shè)計(jì)一種基于STM32為主控芯片的循跡機(jī)器人小車,用CCD攝像頭作為路徑識(shí)別裝置,采用邊緣檢測(cè)算法提取路徑中線,根據(jù)小車的速度與轉(zhuǎn)彎半徑,采用模糊控制調(diào)節(jié)小車左右輪的速度差,達(dá)到路徑識(shí)別與跟蹤的目的。設(shè)計(jì)中通過(guò)建立里程計(jì)模型把小車的實(shí)時(shí)理想位置通過(guò)藍(lán)牙傳送至PC端,PC端通過(guò)數(shù)據(jù)處理將理論軌跡和實(shí)際運(yùn)行軌跡進(jìn)行對(duì)比,實(shí)驗(yàn)結(jié)果表明,小車可以依靠CCD攝像頭很好地識(shí)別任意路徑軌跡,在不同的運(yùn)行速度下,模糊控制都有較理想的循跡控制效果。
關(guān)鍵詞: CCD攝像頭; 循跡; STM32; 模糊控制; 控制器; 路徑識(shí)別
中圖分類號(hào): TN876?34; TP242.6 ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼: A ? ? ? ? ? ? ? ? ? 文章編號(hào): 1004?373X(2019)09?0095?03
Research and realization of CCD camera based fuzzy control method
for tracking robot car
LIU Hanzhong, YU Peng, XIE Qintao
(School of Automation, Nanjing Institute of Technology, Nanjing 211167, China)
Abstract: A tracking robot car taking STM32 as main control chip is designed, in which CCD camera is deemed as the path recognition device, and the edge detection algorithm is used to extract the path central line. According to the speed and turning radius of the car, the fuzzy control is used to adjust the speed difference of the left and right wheels to achieve the purpose of path recognition and tracking. The real?time ideal position of the robot car is transmitted to the PC end by establishing the odometer model. The theoretical trajectory and actual running trajectory are compared by means of data processing on the PC end. The experimental results show that the robot car can accurately recognize any path by means of CCD camera, and the fuzzy control can obtain the ideal tracking control effect at different running speeds.
Keywords: CCD camera; tracking; STM32; fuzzy control; controller; path recognition
0 ?引 ?言
餐廳服務(wù)機(jī)器人以及工業(yè)應(yīng)用中的AGV小車,其動(dòng)力驅(qū)動(dòng)系統(tǒng)都是建立在循跡小車這一基本模型之上的。循跡小車涉及的主要技術(shù)有傳感器技術(shù)、運(yùn)動(dòng)控制等,通常裝有紅外傳感器、超聲波傳感器、掃描激光雷達(dá)以及視覺(jué)傳感器等[1?10]。紅外和超聲傳感器通常需要安裝多個(gè),路徑識(shí)別度較低,但應(yīng)用簡(jiǎn)單。目前掃描激光雷達(dá)及視覺(jué)CCD傳感器是循跡小車發(fā)展的主流[1,3?4,7],識(shí)別度高,但使用復(fù)雜。循跡控制算法通常有基于運(yùn)動(dòng)學(xué)方程[1,3]、PID控制[8]等常規(guī)控制方法,也有一些智能控制方法[1?3]。研究循跡小車的控制算法能夠有助于更好地這些技術(shù)運(yùn)用于生活以及工業(yè)生產(chǎn)中。本文主要介紹基于線陣CCD的路徑識(shí)別方法及基于模糊控制的循跡控制方法。
1 ?系統(tǒng)原理
機(jī)器人小車采用兩輪獨(dú)立驅(qū)動(dòng)的三輪結(jié)構(gòu),兩個(gè)前輪為獨(dú)立驅(qū)動(dòng)輪,后輪為萬(wàn)向隨動(dòng)輪,當(dāng)左右驅(qū)動(dòng)輪速度一致時(shí),小車直線運(yùn)行,當(dāng)左右驅(qū)動(dòng)輪速度存在速差時(shí),小車將轉(zhuǎn)彎運(yùn)行,小車控制系統(tǒng)結(jié)構(gòu)如圖1所示,小車控制器每隔一定時(shí)間通過(guò)安裝在小車上的CCD攝像頭采集一次地面信息,采用邊緣檢測(cè)算法得到路徑中線,并計(jì)算路徑與小車前進(jìn)方向的偏差,結(jié)合給定速度,通過(guò)差速控制器計(jì)算左右輪速度差,然后經(jīng)速度分配得到左右輪實(shí)時(shí)給定速度,由驅(qū)動(dòng)系統(tǒng)帶動(dòng)小車運(yùn)行。
圖1 ?機(jī)器人小車控制系統(tǒng)結(jié)構(gòu)圖

2 ?CCD數(shù)據(jù)讀取及路徑中線確定
準(zhǔn)確獲得路徑信息是循跡的基礎(chǔ),用CCD傳感器可以獲得較為完整的路面信息。本文設(shè)計(jì)中采用TSL1401線陣CCD,其內(nèi)部由一個(gè)128×1的光電二極管陣列、相關(guān)的電荷放大器電路和一個(gè)內(nèi)部的像素?cái)?shù)據(jù)保持器構(gòu)成。對(duì)它施加特定的時(shí)序,就能將128個(gè)像素點(diǎn)的灰度值的模擬信號(hào)輸出。再利用STM32自帶的A/D轉(zhuǎn)換器將模擬信號(hào)變?yōu)閿?shù)字信號(hào),每一個(gè)像素點(diǎn)的灰度值在0~255之間。對(duì)讀到的CCD數(shù)據(jù)采用邊緣檢測(cè)算法提取路徑中線。白色與黑色的灰度值不同,黑色接近0,白色接近255,在黑色軌跡線與白色背景的交界處就會(huì)出現(xiàn)灰度值數(shù)值上的一個(gè)跳變。將128個(gè)像素點(diǎn)用0~127進(jìn)行坐標(biāo)標(biāo)注,可以確定黑線左右跳變的坐標(biāo)值,用公式:中線=[(左坐標(biāo)+右坐標(biāo))2],就可以確定黑線的位置。因此,如果黑線在中間,那么這個(gè)值為64,如果黑線偏左或偏右,這個(gè)值就會(huì)減小或增大。
3 ?差速控制器設(shè)計(jì)
3.1 ?模糊變量及模糊控制規(guī)則確定
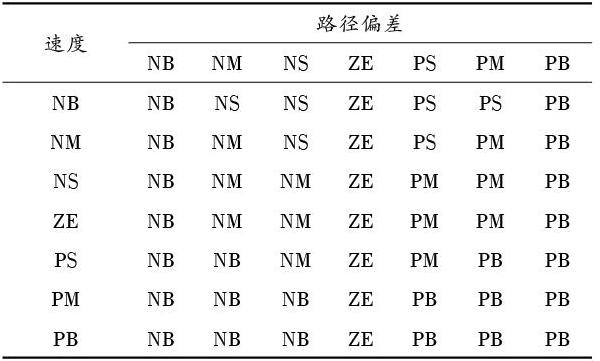
本文設(shè)計(jì)的循跡小車差速控制器采用模糊控制算法,將小車與路徑中線的偏差及給定小車運(yùn)行速度作為模糊控制器的輸入變量,左右輪速度差作為模糊控制器的輸出變量。模糊變量論域選取[-6,6],該論域上選取三角形隸屬度函數(shù)確定變量的7個(gè)值,即PB,PM,PS,ZE,NS,NM,NB。通過(guò)推理確定模糊控制規(guī)則,例如,當(dāng)小車速度較快時(shí),在轉(zhuǎn)彎處為了防止偏離路徑,那么速度差就應(yīng)該大一點(diǎn);速度低時(shí),速度差就能稍微小一點(diǎn)。轉(zhuǎn)彎半徑由速度差決定,因此如果偏差很大,那么無(wú)論高速低速,速度差也應(yīng)該很大。最終確定的模糊控制規(guī)則如表1所示。
表1 ?模糊控制規(guī)則庫(kù)
3.2 ?量化因子確定
如前所述,中線值為64,表示小車在路徑中央,取路徑偏差=中線-64,偏差值為負(fù)表示黑線偏左,為正表示黑線偏右,因此偏差的變化范圍是[-64,64]。通過(guò)實(shí)驗(yàn),小車運(yùn)行速度范圍取[21,27],驅(qū)動(dòng)輪速度差的變化范圍是[-81,81],由于各變量離散論域范圍是[-6,6],因此可以很方便地計(jì)算出各變量的量化因子。
3.3 ?模糊控制表確定及模糊推理
模糊控制規(guī)則確定以后,利用Mamdani推理原理及重心法計(jì)算出模糊控制輸出值,得到模糊控制表,將該模糊控制表以二維數(shù)組的形式存儲(chǔ)在STM32中。實(shí)際工作過(guò)程中,控制器只需要對(duì)路徑偏差和運(yùn)行速度進(jìn)行量化、查表就可以得到速度差的量化等級(jí),再乘以量化因子就可以得到兩驅(qū)動(dòng)輪的實(shí)際速度差。
4 ?速度分配
為防止轉(zhuǎn)彎過(guò)快導(dǎo)致運(yùn)行不平穩(wěn),本文設(shè)計(jì)采用的方法是讓一個(gè)輪子速度不變,另一個(gè)輪子減去速度差,由此得到兩個(gè)輪子的給定速度值。例如,小車在直行進(jìn)入左轉(zhuǎn)時(shí),右輪速度不變,左輪速度就要減去速度差。同理,右轉(zhuǎn)時(shí),左輪速度不變,右輪速度減去速度差。這樣小車在轉(zhuǎn)彎時(shí)的平均速度就減小了,入彎或者出彎就會(huì)比較平穩(wěn)。
5 ?驅(qū)動(dòng)輪速度調(diào)節(jié)算法
如圖1所示,驅(qū)動(dòng)輪電機(jī)給定速度由模糊控制器輸出速度偏差值經(jīng)速度分配得到,驅(qū)動(dòng)輪電機(jī)實(shí)際速度可以通過(guò)電機(jī)編碼器計(jì)算得到,因此電機(jī)驅(qū)動(dòng)器占空比[uk]可以由式(1),式(2)計(jì)算得到:
6 ?里程計(jì)模型建立
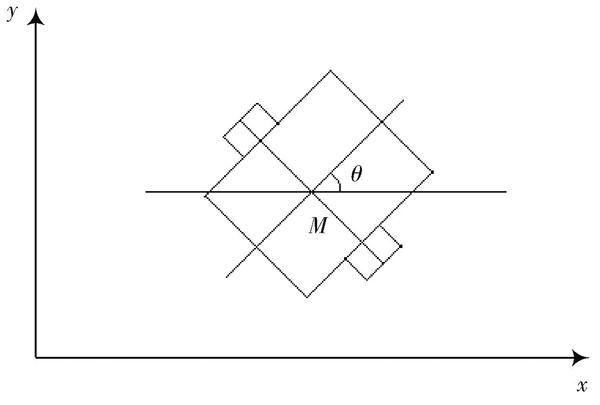
小車的理想位姿可以通過(guò)里程計(jì)模型確定,如圖2所示建立一個(gè)坐標(biāo)系,小車的位姿可以表示為[[x,y,θ]]。[(x,y)]表示坐標(biāo),[θ]表示航向角。[M]為左右輪連線中點(diǎn)。
圖2 ?小車模型示意圖
7 ?尋跡實(shí)驗(yàn)
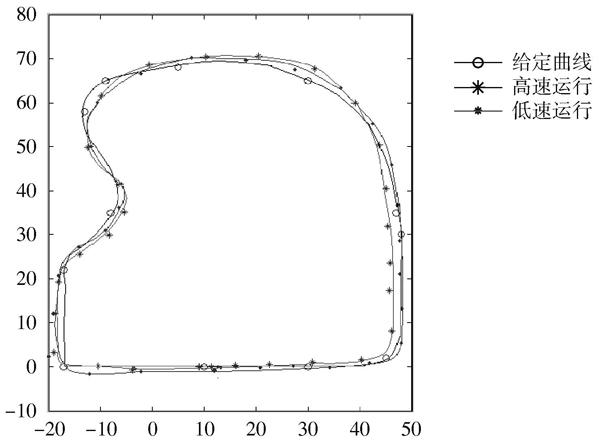
為了測(cè)試循跡小車控制算法并不失一般性,在實(shí)驗(yàn)中特意設(shè)計(jì)一條不規(guī)則的黑色路徑,讓小車分別以較低速和較高速按照該路徑運(yùn)行。小車循跡實(shí)驗(yàn)圖如圖3所示,在運(yùn)行過(guò)程中,每隔0.5 s將左右輪轉(zhuǎn)過(guò)的距離[Δs1]和[Δs2]通過(guò)藍(lán)牙發(fā)送到PC端,PC端接收到數(shù)據(jù)后利用式(3)~式(7)計(jì)算出小車的實(shí)時(shí)理想位姿[[x(k),y(k),θ(k)]T],并用Matlab將各時(shí)刻坐標(biāo)點(diǎn)繪制成曲線,如圖4所示。可以看出,基于模糊控制的小車循跡算法在低速和高速情況下,循跡跟蹤誤差都較小,說(shuō)明模糊控制循跡效果較好。
圖3 ?小車循跡實(shí)驗(yàn)圖
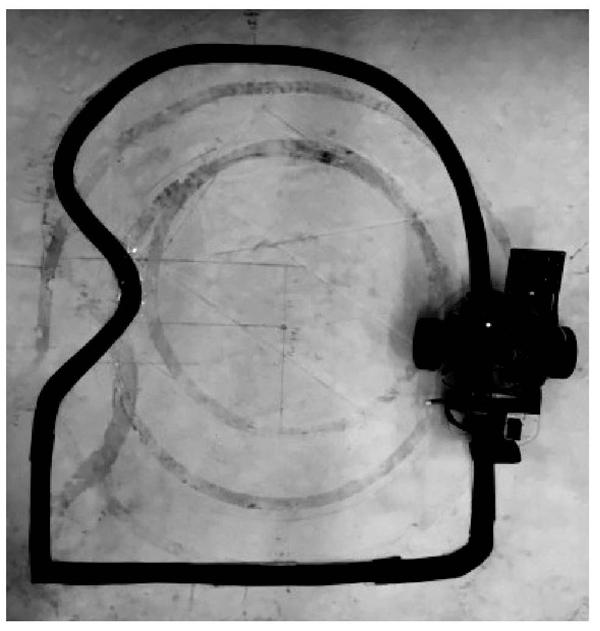
圖4 ?小車循跡曲線圖
8 ?結(jié) ?論
本文設(shè)計(jì)通過(guò)對(duì)線陣CCD數(shù)據(jù)的讀取,利用邊緣檢測(cè)原理很好地識(shí)別了路徑中線,在模糊控制算法下,小車能很好地在任意黑色引導(dǎo)線上進(jìn)行路徑跟蹤,并且響應(yīng)較快、跟蹤誤差較小、運(yùn)行穩(wěn)定。實(shí)驗(yàn)結(jié)果表明,基于模糊控制的小車循跡控制算法效果好,在服務(wù)機(jī)器人運(yùn)動(dòng)控制場(chǎng)合具有一定的應(yīng)用價(jià)值。
參考文獻(xiàn)
[1] 王建彬.四輪全向移動(dòng)機(jī)器人的運(yùn)動(dòng)控制與運(yùn)動(dòng)控制規(guī)劃研究[D].廣州:廣東工業(yè)大學(xué),2014.
WANG Jianbin. Study on motion control and motion control planning of four?wheeled omnidirectional mobile robot [D]. Guangzhou: Guangdong University of Technology, 2014.
[2] 肖蕾.輪式移動(dòng)服務(wù)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)研制[J].制造業(yè)自動(dòng)化,2013(19):38?41.
XIAO Lei. Development of motion control system for wheeled mobile service robot [J]. Manufacturing automation, 2013(19): 38?41.
[3] 王珊珊.輪式移動(dòng)機(jī)器人控制系統(tǒng)設(shè)計(jì)[D].南京:南京理工大學(xué),2013.
WANG Shanshan. Design of wheeled mobile robot control system [D]. Nanjing: Nanjing University of Science and Technology, 2013.
[4] 楊寧,石冰飛,朱平,等.基于CCD的自動(dòng)循跡小車的軟件設(shè)計(jì)[J].自動(dòng)化與儀表,2012,33(1):52?55.
YANG Ning, SHI Bingfei, ZHU Ping, et al. Software design of the auto tracking car based on CCD [J]. Process automation instrumentation, 2012, 33(1): 52?55.
[5] 王琰,郭燕.基于C51單片機(jī)的智能循跡小車設(shè)計(jì)與實(shí)現(xiàn)[J].機(jī)電一體化,2013,19(8):60?63.
WANG Yan, GUO Yan. The design and implementation of the intelligent tracking car based on single?chip microcomputer C51 [J]. Mechatronics, 2013, 19(8): 60?63.
[6] 張江林.基于LM393控制的太陽(yáng)能循跡小車設(shè)計(jì)與實(shí)現(xiàn)[J].現(xiàn)代電子技術(shù),2015,38(10):121?123.
ZHANG Jianglin. Design and implementation of solar tracing car controlled by voltage comparer LM393 [J]. Modern electro?nics technique, 2015, 38(10): 121?123.
[7] 趙萬(wàn)欣,陳思屹.基于TSL1401線性CCD的智能巡線小車[J].工業(yè)控制計(jì)算機(jī),2014,27(2):121?122.
ZHAO Wanxin, CHEN Siyi. Small intelligent patrol line vehicle based on TSL1401 linear CCD [J]. Industrial control computer, 2014, 27(2): 121?122.
[8] 冷雪鋒.基于PID的STM32智能小車機(jī)器人的設(shè)計(jì)[J].自動(dòng)化技術(shù)與應(yīng)用,2016,35(11):122?126.
LENG Xuefeng. Design of STM32 intelligent car robot based on PID [J]. Techniques of automation and applications, 2016, 35(11): 122?126.
[9] 張國(guó)強(qiáng),白明雄,康琦,等.基于MSP430單片機(jī)的智能壓路小車設(shè)計(jì)[J].現(xiàn)代電子技術(shù),2014,37(22):98?100.
ZHANG Guoqiang, BAI Mingxiong, KANG Qi, et al. Design of intelligent roller based on MSP430 microcontroller [J]. Mo?dern electronics technique, 2014, 37(22): 98?100.
[10] 徐昌華.高可靠小車紅外光循跡設(shè)計(jì)原則[J].現(xiàn)代電子技術(shù),2013,36(23):158?160.
XU Changhua. Design principles of car infrared tracking with high reliability [J]. Modern electronics technique, 2013, 36(23): 158?160.
