隔水管試壓檢測過程中自動對位控制系統研究
2019-08-30 01:55:54艾志久張志東敬佳佳
制造業自動化 2019年8期
關鍵詞:檢測
艾志久,張志東,,敬佳佳
(1.西南石油大學 機電工程學院,成都 610500;2.中國石油川慶鉆探工程有限公司安全環保質量監督檢測研究院,廣漢 618300)
0 引言
在海洋油氣勘探開發裝備中隔水管是核心裝置之一。所謂隔水管,是指連接海底井口與鉆井船或鉆井平臺之間的導管,是鉆采作業時循環泥漿的安全通道[1]。由于我國材料、設計、制造、檢驗、評價等技術水平相對落后,一直以來隔水管的生產制造被個別國外石油裝備公司所壟斷,國內隔水管及其配套產品完全依賴進 口[1~5]。
對于隔水管而言,其試制樣品和產品的檢驗檢測工作,是驗證其綜合性能的關鍵環節,按照相關設計、制造、質量管理等要求,不僅需要對隔水管的基體材質、零部件等進行全面的性能檢驗,同時還需要對隔水管進行整體承壓能力、兩端法蘭密封組件性能、疲勞性能等進行試驗驗證。然而,由于國內沒有隔水管的設計制造基礎,相關的檢測及性能評價技術也屬于技術空白。因此,在隔水管研制過程中,亟需同步開發這些配套檢測及性能評價裝備,以滿足研制過程中樣品的性能測試和成熟產品的出廠檢驗。
本文針對隔水管檢測中的自動對位問題建立了封堵裝置的空間6自由度動力學模型,利用雙目視覺獲取封堵端與隔水管之間的相對位姿,并根據試壓封堵裝置的機構特征提出了基于模糊PID的對位控制策略。
1 隔水管試壓裝置動力學模型
注水端封堵裝置與試壓端封堵裝置均可利用空間六自由度剛體模型進行描述,因此本文只對注水端封堵裝置進行研究。通過高精度自動檢測與控制調節使封堵與隔水管公頭法蘭端面自動對位。
為了清楚地描述封堵裝置的運動,選取兩個坐標系,即動坐標系o-xyz和靜坐標系O-XYZ。選取動坐標系的坐標原點為封堵轉置的幾何中心,坐標軸的方向始終與裝置的慣性主軸方向平行。將靜坐標系(又稱參考坐標)固定在封堵裝置底座上。
使用歐拉角來描述封堵裝置的姿態,按照特定順序(Z-Y-X/3-2-1)進行轉動,這一過程旋轉的三個歐拉角依次用ψ、θ和φ進行表示,具體定義如圖1所示。
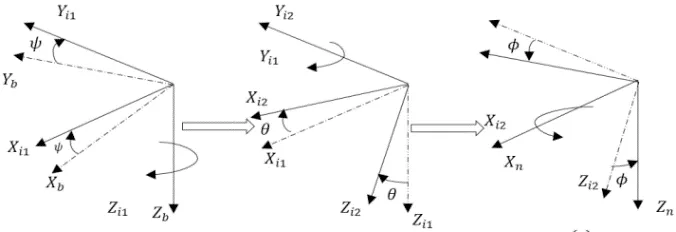
圖1 坐標轉換示意圖

旋轉運動由歐拉運動方程描述,定義ω=[p,q,r]' 為動坐標系下的角速度,則:

其中,

根據牛頓-歐拉方程,封堵裝置的動力學模型可以由式(4)、式(5)表示。
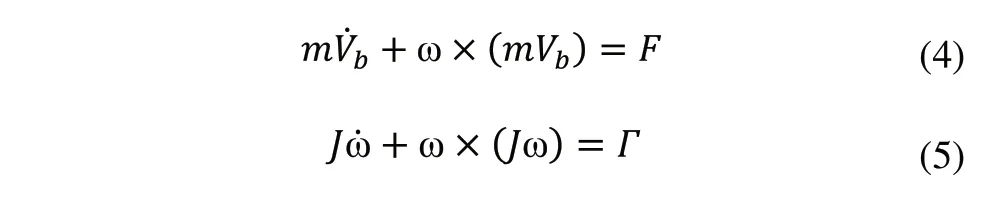
其中,J=diag(Jxx,Jyy,Jzz)為封堵裝置的慣量矩陣。F為封堵裝置受到的外力和,m為裝置質量,Vb是裝置的移動速度,Γ為裝置相對于地面坐標系的相對動 量矩。
2 電機模型
電機的電氣方程和機械方程分別為:
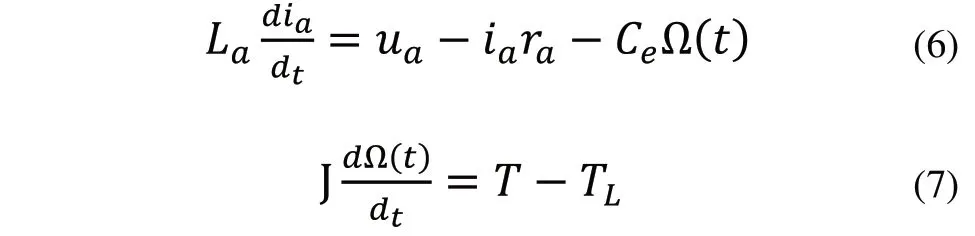
其中,T=Cria,J為折算到電動機軸上的總轉動慣量,Ce為電機電勢系數。把式(6)、式(7)進行拉普拉斯變換,并進行計算整理得直流電機轉速相對于輸入電壓的傳遞函數模型為:

3 圖像測量
隔水管對接控制需要檢測隔水管的空間姿態,本文采用雙目視覺技術進行隔水管端面空間姿態的測試。
對位檢測系統方案如圖2所示。其中①為試壓端封堵裝置,②為被試隔水管,③為導軌。按照上述模型,機器視覺系統將自動完成數據采集、圖像預處理、平行度確認、誤差獲取等工作。
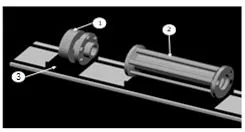
圖2 自動對位檢測系統模型示意圖
要實現對接面平行對準,則必須計算出兩端面所在平面的相對夾角大小,然后根據夾角來調整隔水管注水端法蘭面使得兩法蘭面平行對準。
為此,不妨設法蘭端面特征圓圓心的坐標(xi,yi,zi),其中i=1,2,…,6,選其中3個特征點的坐標分別為A1(x1,y1,z1),B1(x2,y2,z2),C1(x3,y3,z3),現設隔水管法蘭面的平面方程為:

則特征點三維坐標滿足平面方程(10):
由方程組(10)可解得隔水管法蘭面的平面方程參數。則隔水管注水端法蘭面的平面法向量為:=(o1,n1,l1),同理可得到隔水管法蘭面的法向量=(o2,n2,l2)。
由此可以通過雙目視覺模型,采用所得相關參數定義該理想位姿為基準位姿,并使用x,y,θ表示,那么最終的移動偏差量( x, y,θ)可由下式計算得到:
其中x,y為法蘭端面中心坐標,θ為法蘭端面所處的方位角。再使用x',y',θ'表示隔水管對接過程中從實時圖像中檢測到的位姿,那么在全局坐標系中,給出使封堵配合隔水管法蘭端面徑向對中的位移向量可表示為(- x,- y,0),旋轉向可表示量為(0,0, - θ)。
4 模糊PID控制系統
4.1 模糊PID
傳統的PID控制方法針對的魯棒性不夠理想。因此,為了完善控制系統經常將普通PID控制器和模糊控制器結合使用,提高控制系統的性能[6]。其工作原理如圖6所示。
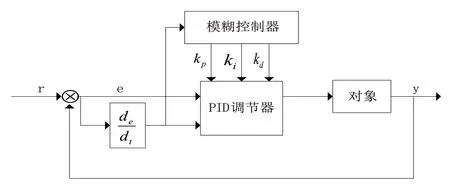
圖6 模糊PID控制原理圖
模糊PID控制是找出PID三個參數kp、ki、kd與誤差e和誤差變化率ec之間的模糊關系,在運行中通過不斷檢測e和ec,根據模糊控制規則來對三個參數進行在線修改,以滿足不同e和ec時對控制參數的不同要求,而使被控對象有良好的動、靜態性能。
4.2 姿態調節的模糊解耦
由于隔水管外形尺寸較大,而且各執行機構本身的加工、裝配存在誤差,這將導致機構X、Y、Z三軸之間并非完全垂直,故在姿態的調節上存在耦合問題。因此,在控制系統中需要利用模糊解耦算法解決耦合 問題。
將解耦后的系統作為新的被控對象而不改變系統本身特性,加入模糊解耦補償器的控制系統結構如圖7所示。
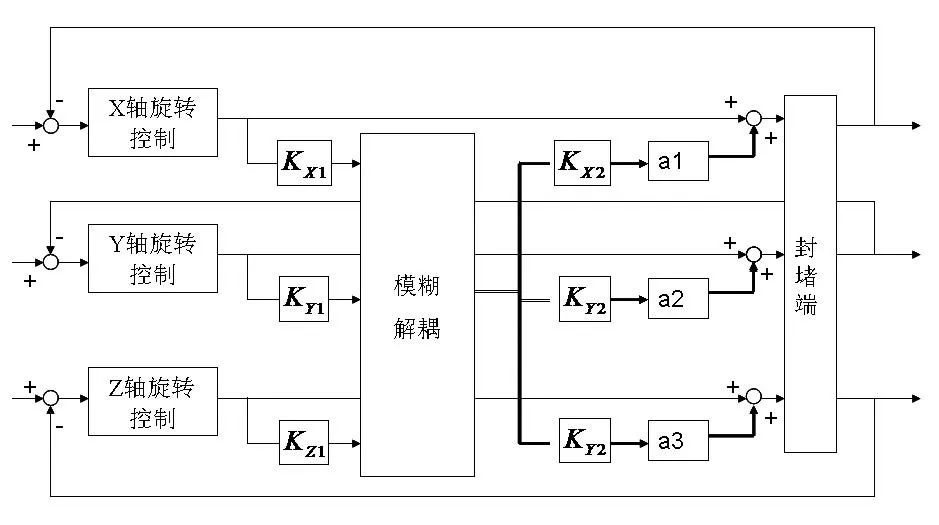
圖7 包含模糊解耦補償作用的系統框圖
模糊解耦補償器可以看作一個MISO模糊控制器,通過調節參數KX1、KY1、KZ1作為模糊解耦補償器的輸入,該補償器的輸出量通過KX2、KY2、KZ2的調節后與各軸旋轉控制器的控制量疊加。其中數a1、a2、a3的取值為1或者-1,該變量的決定了對旋轉控制器的輸出補償的符號。
將模糊解耦補償器的被控變量的誤差以及誤差的變化率作為輸入語言變量,將對象的控制量作為模糊解耦補償器的輸出語言變量。模糊解耦補償器的輸入輸出語言變量的模糊子集表示為{NB,NM,NS,O,PS,PM,PB}。
4.3 模糊化與解模糊規則的選取
4.3.1 模糊化規則
通常采用隸屬度法對連續輸入信號進行模糊化,即將精確輸入量通過查表或者函數計算所得的隸屬度值作為模糊化后的值。
為了減小計算量,增加控制的實時性,并設置誤差E的隸屬函數為三角形隸屬函數,如圖8所示。
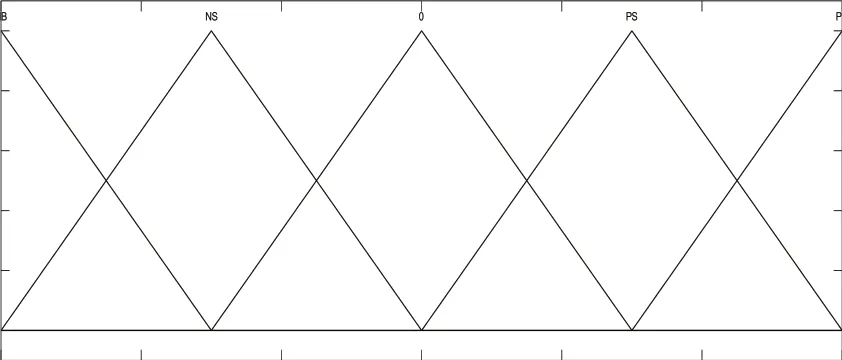
圖8 誤差變量E的隸屬度曲線
4.3.2 解模糊化規則
在重心法去模糊化中,每一個由模糊控制器產生的模糊結論都會對最終輸出的結論有影響,它更符合人類的思維方式[9]。因此本文采用重心法,重心法去模糊化過程可描述為將每個模糊控制器得出的結論乘其隸屬程度,將這些結果求和后除總隸屬程度之和得出最終的結論,公式如下:

式(15)中,n為輸出模糊集中元素個數;μc(ci)為ci元素的隸屬度;ci為輸出模糊集中的元素。
5 實驗分析
5.1 視覺自動對位檢測系統試驗分析
在試驗時,利用本裝置對H級3米長隔水管(試驗樣品)進行了現場試驗。為驗證檢測系統的精度,在現場通過人工精準控制自由度的方式,對已對位的隔水管進行角度為5.00°的旋轉,對旋轉后的隔水管進行法蘭端特征圓圓心的計算,得出旋轉后隔水管法蘭端面所在平面方程。計算得出兩平面的測試夾角大小為5.09°,誤差僅為1.8%(0.09°),符合隔水管自動對接過程中端面平行度檢測的設計精度要求。
計算出精確的隔水管對接控制時需要執行的移動偏差和角度偏差。通過模板計算,計算出待測端面的位姿、角度偏差eθ以及移動偏差ex和ey,檢測結果如表1 所示。
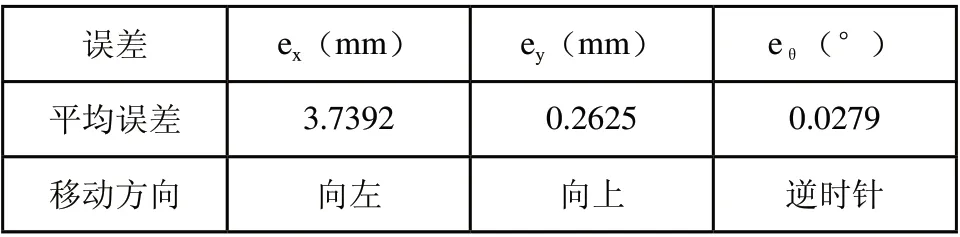
表1 檢測偏差值
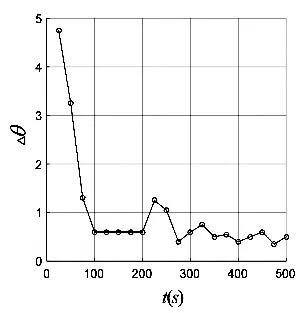
圖9 角度誤差隨時間的變化圖
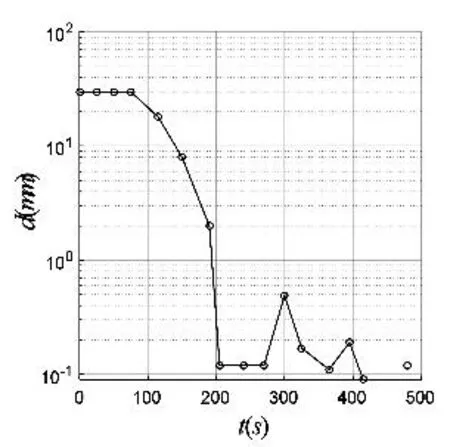
圖10 位置誤差隨時間的變化
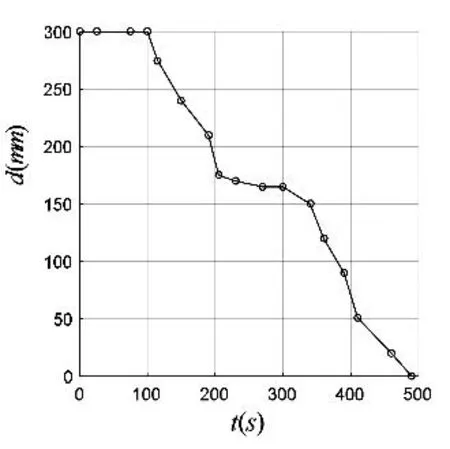
圖11 封堵與隔水管法蘭之間相對位移隨時間的變化
5.2 模糊PID對位控制系統試驗分析
封堵與隔水管法蘭之間角度誤差、位置誤差隨時間變化曲線如圖9和圖10所示,封堵與隔水管法蘭之間相對位移隨時間的變化曲線如圖11所示。
由圖9可知:在初始對位階段,經過90s后角度誤差快速減小;當兩端面之間的角度誤差小于1°后,系統認為兩端面已經處于平行狀態,且各副管位置已對中。由圖10可知,在調整角度誤差時位置誤差誤差未做調整。位置誤差在100s的時間減小到0.3mm以內,達到了精度要求。由圖11可知,在位置誤差調整的同時,注水端與隔水管開始靠近。
為了驗證自動對位系統的穩定性與可靠性,對系統進行10次試驗,將角度誤差隨時間變化的數據記錄在表2中。由表2可知,10次試驗角度誤差的初始值不同,但經過400s的調節,角度誤差都能小于1°,并且可以穩定在0°~1°的誤差帶以內。因此,可以表明該系統的穩定性與可靠性。
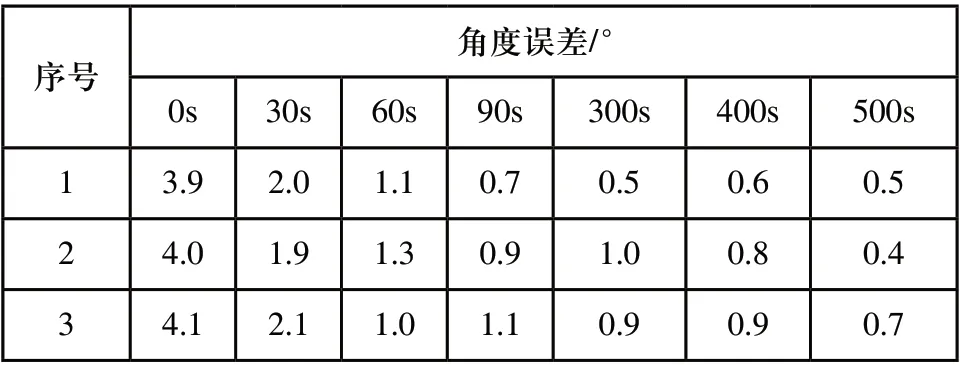
表2 多次試驗結果角度分析
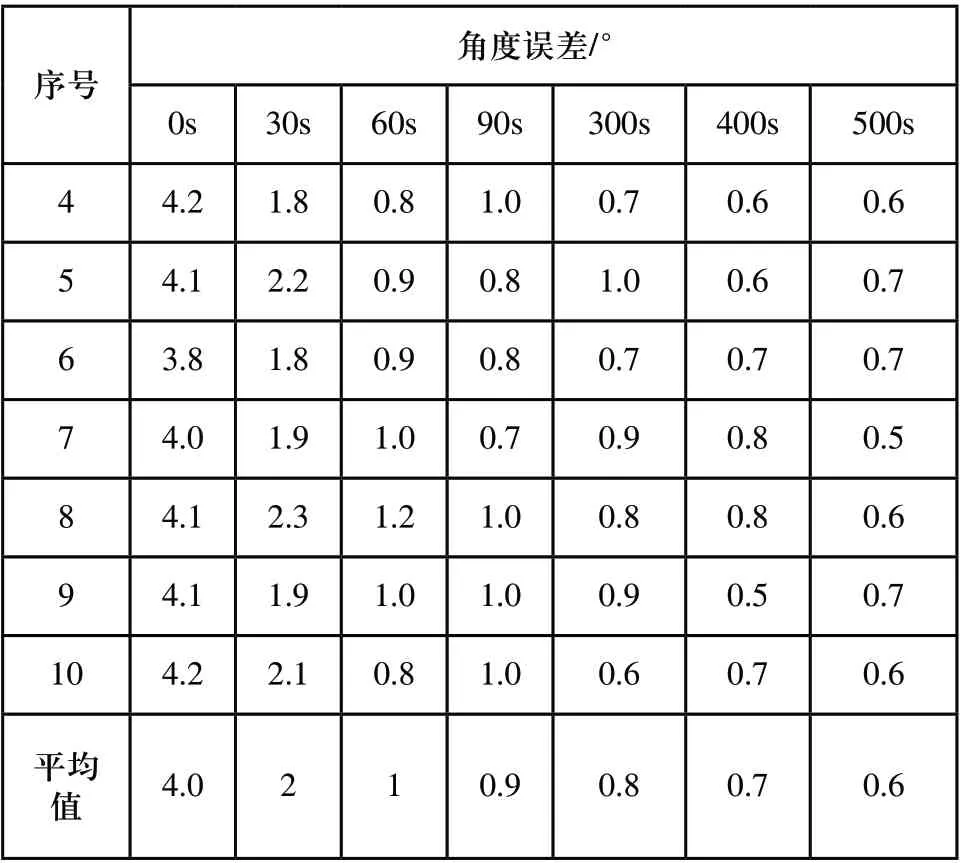
表2(續)
6 結論
本文針對空間6自由度的隔水管,利用模糊解耦消除其各軸之間的耦合,從而針對每個軸設計模糊PID控制器以實現隔水管的自動對位。對位過程中采用雙目視覺對位置及平行度進行實時檢測,從而提高了裝置的自動化水平和工作效率。一定程度上解決了試壓裝置的關鍵技術問題,達到了預期的要求。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
