新型臥式下肢康復訓練機器人機械系統設計
2019-08-26 01:30:27馬艷
山東工業技術 2019年24期
馬艷

摘 要:對于長時間臥床的偏癱患者以及下肢行為較為虛弱的患者來講,研究一種臥式康復訓練機器人,能讓患者在床上進行康復訓練。因此,在各種康復訓練模式上,文章設計了新型臥式下肢康復訓練機器人機械系統,并記述了內在的構造。
關鍵詞:下肢;康復訓練;機器人;康復訓練模式,伺服系統;腦卒
DOI:10.16640/j.cnki.37-1222/t.2019.24.068
0 前言
對于治療腦卒中診斷水平在逐漸提升,在很大程度上提高了患者存活率。腦卒中偏癱患者運動功能會有所降低,這是因為改變了肌肉與神經元繼發性,當不進行有效的治療,將會留下許多并發癥,但也不能盲目的訓練,這樣的訓練方式,較為影響患者日常生活質量。然而,使用運動康復訓練能有效恢復中樞神經,預防肌肉萎縮產生。
1 康復訓練模式分析
對于下體虛弱從而無法直立行走的患者,則需要使用臥式下肢康復訓練機器人,機器人主要針對患者在躺臥狀況下對患者施行的被動的康復訓練,從而保護關節的正常活動狀況,避免影響肢體的運動情況。查閱關于下肢康復的相關書籍中以及結合機器人的相關技術,最終總結出如下類康復訓練模式。髖關節是位于大腿軸線與身體冠狀間出現的夾角部位,位于小腿軸線與大腿軸線的夾角稱為膝關節角度,對于踝關節部位的矢狀位置,需繞額狀軸展開運行,逐步向前運行,慢慢變為背屈,向后展開運動,我們稱為跖屈。如果將其放置到水平面上,應圍繞小腿來展開運動,逐漸接近中間部位,稱之為內收,外展是稱正中面位置。在康復訓練過程中,需要根據患者身體情況,合理、有效的對運動角度選擇。為了確保運動具有足夠的柔順性與舒適型,需髖關節和膝關節在起點位置控制為10度左右。
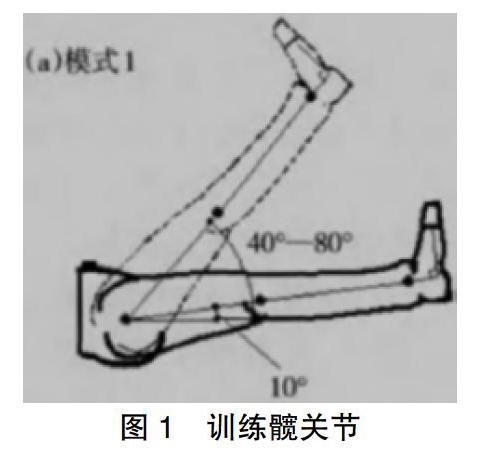
1.1 訓練髖關節
患者在訓練髖關節過程中,應維持膝關節和踝關節不變的情況下,盡量增寬髖關節中的運動角度,使得患者腿部筋絡疏通,促進血液循環間的流動,在此基礎上,髖關節最大的活動區域為80度,能對其開展任意的調節。如圖1訓練髖關節。
1.2 鍛煉膝關節
維持髖關節和踝關節不變的基礎上,適當降低亦或增大膝關節活動角度,這樣能拉伸膝關節位置韌帶,幫助疏通經絡作用。在此模式下,應保持髖關節角度在90度左右,這樣能隨意調整膝關節活動區域。
2 臥式下肢康復訓練機器人總體設計
根據以上康復訓練模式,應達到不同患者身高與病床要求,這樣能方便進行有效操作。根據人體特征來設計下肢康復訓練機器人。
2.1 設計機器人腿部機構
機器人腿部是外骨骼機械機構,經過外力的作用下,可有效改變患者下肢神經與肌肉系統,幫助患者行走,在患者腿部安置上主力裝置,能替代治療師協助患者做一些較為簡單的康復訓練運動。為患者安裝上仿生機械機器,能讓患者自由活動,對患者做腿部康復訓練也非常有幫助[1]。設計的機器人有髖關節和膝關節以及踝關節,都是大腿、小腿以及腳部組成。在各個部位,都會安裝上交流伺服電機,這樣才能使腿部來回運動,實現旋轉髖關節運動目的。為了能降低患者腿部負擔,應減小重心,合理減小關節位置的安裝尺寸,電機與減速器都應選擇傳動連接的模式。這樣電機才能帶動驅動減速器,擺動膝關節。安裝的電機1與電機2能互相協調,掌握人體踝關節軸線軌跡。交叉安裝電機1與電機2,才能控制好踝關節軸線矢狀面。減速器3與4可交叉安裝,通過電機3才能帶動驅動減速器3進行旋轉,從而實現踝關節內收以及外展運動。控制下肢中內旋和外旋運動。
2.2 系統工作原理
在機器人工作時,要先將患者腳踝部位放在支撐架上,腳面放在腳踏板上面并固定。之后使用選定好的模式進行康復,電動機械腿可以帶動患者腿向前邁進,讓患者腿部能根據機械來回運動,實現鍛煉患者關節的目的。在機器人的設計上,康復機器人適用于兩只腿的康復鍛煉,當右腿需要做康復時,應以大腿軸心到地面垂線為對稱周,控制電機中各個關節位置,旋轉腳固定板,將腿部支撐從支撐架上撥出,在另外一端耳朵插入到支撐架上。
3 機器人控制系統
設計與分析外骨骼機械腿部,了解控制當前系統,在機器中,應合理掌握系統原則,掌握控制系統中上、下結構開發式機器人控制系統。通過PCL總線實現兩者間通訊。研制的機器人控制系統,能融合PC機的信息處理,將其開放特點與運動有效結合,加強信息處理能力,這樣能使軌跡掌握的更加精準,適合各類人群。
某某運動控制器材,輸出脈沖與模擬量,掌握信號四軸運動,其中,核心部位便是邏輯計算能力中的模塊和數字信號處理,從而掌握伺服運動。通過模擬量數據采用轉換通道,能達到大腿軸扭矩傳感器扭動。作為輔導人員,應了解機器人大腿軸扭矩是怎樣的改變的,患者康復情況如何,預防扭傷患者的狀況產生。
4 結束語
綜上所述,臥式下肢康復訓練機器人,是一種集成機電系統,能有效對硬件配置以及機械結構做出詳細的說明,來達到新型臥式下肢康復,結合機器人與康復醫學相結合,能使得患者恢復到正常的生活,能達到預期目標。接下來,應更進一步的分析柔性化控制,最后將其人和機相結合。
參考文獻:
[1]潘志超,徐秀林,肖陽.下肢康復機器人研究進展[J].中國康復理論與實踐,2016,22(06):680-683.