基于Smart3D的山西工程職業學院唐槐校區三維實景建模研究
2019-08-26 01:20:29董陽武
山東工業技術 2019年22期
董陽武
摘 要:利用無人機傾斜攝影測量技術進行快速三維實景建模,是測繪地理信息熱點方向之一,具有速度快、精度高、過程自動化等特點。本文以山西工程職業學院唐槐校區東北角為試驗場地,利用Phantom 4 Pro無人機獲取傾斜影像數據,Smart3D 軟件生成滿足1:500大比例尺測圖標準的三維實景模型,并對成果精度分析驗證,總結了建模過程中關鍵技術要點和潛在問題,取得了一定成果。
關鍵詞:傾斜攝影測量;三維實景建模;Smart3D;精度分析
DOI:10.16640/j.cnki.37-1222/t.2019.22.083
1 引言
隨著無人機技術的快速發展,無人機傾斜攝影三維建模正成為較為火熱的研究領域。該方式具有自動化程度高、效率高、精度高、靈活、成本低的特點,彌補人工建模的諸多不足。該建模方式受到越來越多的關注和發展[1]。
Smart3D 軟件是我國廣泛使用的傾斜攝影建模軟件,能在無需人工干預的情況下自動建立城市實景三維模型,具有科學的計算機視覺三維重建過程,經過空三加密、點云匹配、紋理映射等流程環節,自動化、高精度地完成三維重建[2]。此外,美國的Photomesh、瑞士的 Pix4D Mapper、俄羅斯的 Photo Scan等軟件均是在世界上享有盛譽的傾斜攝影測量軟件。
本文以山西工程職業學院唐槐校區東北角為試驗場地,利用Phantom 4 Pro無人機獲取傾斜影像數據,用Smart3D 軟件進行三維實景生產,用南方 RTK儀器在試驗區測量30個檢測點坐標高程值,用實測數據與模型采集數據對比分析,對試驗結果進行精度評定。并總結了建模過程中關鍵技術要點和潛在問題,取得了一定成果。
2 三維實景數據生產
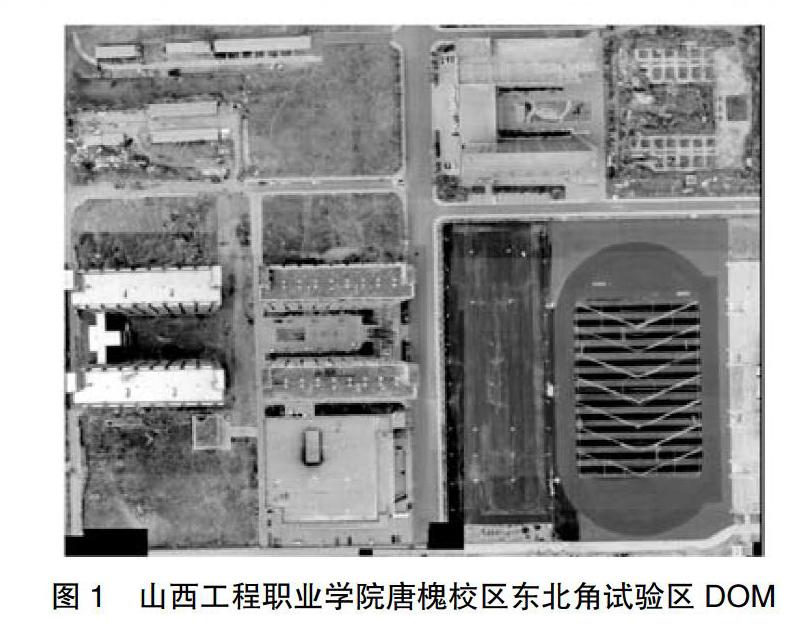
2.1 測區基本概況
此試驗區為山西工程職業學院唐槐校區東北角。試驗區主要有圖書館、體育場、部分學生及教職工宿舍、部分教學樓等建筑,地物類型較多,難易程度適中,適合三維建模試驗。經緯度坐標范圍為 112.6031°E~112.6075°E,37.6778°N~37.6806°N。如圖1所示。
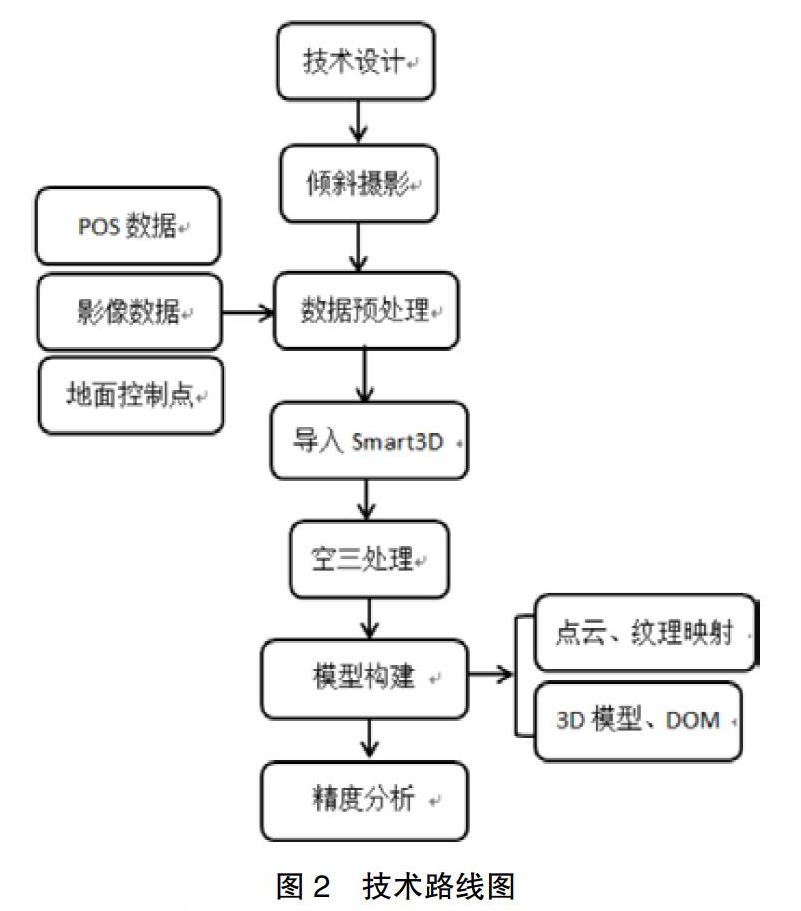
2.2 技術路線
具體技術路線如圖2所示[3]。
2.3 無人機外業航飛
本文試驗于 2018 年4 月24日進行了航飛作業。采用Phantom 4 Pro無人機,相機型號為FC6310,傳感器大小為12.8mm,相機焦距為24mm,航向和旁向重疊度均為80%,地面分辨率為2.47cm 。本次試驗獲得312張帶POS坐標的傾斜影像。布設控制點5 個,坐標系統為西安 80,1985 國家高程基準。
2.4 Smart3D建模
將POS數據、傾斜影像、地面控制點導入 Smart3D工程進行空三加密,使用 POS 數據平差,軟件自動進行相機校驗和像片模型相對定向。將控制點具體位置標定在相關影像上。第二次空三,使用控制點平差,進行模型絕對定向。經過空三加密后獲得密集點云,構建不規則三角網TIN,生成白模,完成紋理映射,生成實景3D模型[4](圖3)。
3 精度分析
3.1 空三精度評價
空三精度決定3D模型質量,需對空三進行精度控制和分析。本次試驗使用控制點5個。5個控制點X 坐標中誤差為0.004m,Y 坐標中誤差為0.008m,平面中誤差為0.009m;高程中誤差為0.001m;重投影均方根中誤差為0.31px;3D 中誤差0.009m。精度達到要求。
3.2 模型精度評價
為了檢驗模型精度,測區選用30個地物點,用RTK實測其坐標高程值。對檢測坐標和三維模型采集點獲取坐標對比,進行精度評定[5]。評定公式為:
其中,M為成果中誤差;n為檢查點總數;為較差。對檢查點采集值和檢測值較差波動分布統計,、和分別在-0.08~0.09m、 -0.07~0.10m和-0.09~0.06m之間波動,平面中誤差為0.06m,高程中誤差為0.05m,滿足1:500地形圖成圖精度要求[6]。
4 成果及關鍵技術問題總結
(1)此技術方法具有速度快、成本低、自動化程度高、模型精度高、紋理清晰等優點,能完全滿足1:500比例尺地形圖成圖精度要求。
(2)有時Smart3D空三計算失敗,可能由于影像畸變能力較弱,相機校準參數偏離真值等問題[7]。可以采用其他軟件比如photoscan空三加密,成果導入 smart3D進行高精度自動化的三維建模。
(3)為獲得較好的3D模型和表面紋理,應使航帶具有合理的航向重疊度和旁向重疊度[8]。
(4)對于攝影盲區和河流湖泊的建模等常會出現空洞區域,需導入第三方修模軟件(比如Meshmixer、3DMAX)進行處理優化。
參考文獻:
[1]范攀峰,李露露.基于Smart3D的低空無人機傾斜攝影實景三維建模研究[J].測繪通報,2017(S2):77-81.
[2]任東風,楊帆,潘紅汐.基于 Smart3D 的遼工大北校區三維實景建模研究[J].測繪與空間地理信息,2019(02):16-18.
[3]熊強,王雙亭等.基于Smart3D的傾斜攝影測量模擬系統三維建模[J].測繪工程,2018(07):55-59.
[4]鄭盼.基于Smart3D軟件的無人機傾斜攝影三維建模及精度評價[D].成都:成都理工大學,2018.
[5]關麗,丁燕杰,張輝等.面向數字城市建設的三維建模關鍵技術研究與應用[J].測繪通報,2017(02):90-94.
[6]趙澤華,趙鵬全,趙永貴.基于Smart 3D的無人機航測地形圖方法[J].地礦測繪,2018(04):22-24.
[7]李瑩,林宗堅,蘇國中等.Smart3D數據的三維模型重建[J].測繪科學,2017(09):88-93.
[8]ACKERMANNF.Practical Experience with GPS-sup-ported Aerial Triangulation[J].Photogrammetric Re-cord,1994,16(84):861-874.