編隊區域防空艦空導彈沖突判斷與消解
2019-08-26 02:58:00張朱峰吳玲
現代防御技術 2019年4期
張朱峰,吳玲
(海軍工程大學 兵器工程學院,湖北 武漢 430033)
0 引言
在編隊區域防空作戰中,編隊多平臺利用艦空導彈攔截多批次空中目標時,可能發生火力沖突并構成安全問題。對艦空導彈火力沖突進行判斷和消解是充分發揮武器作戰潛能,有效完成編隊區域防空作戰任務的重要環節。
針對導彈沖突判斷和消解問題,美軍《海軍艦船通用規范》、俄軍“土星Ⅱ”火力兼容控制系統等資料提供了艦載多武器協調使用的策略和方法[1],但主要針對傳統艦炮和傾斜式發射的導彈武器系統,近年來研究越來越多的圍繞新一代武器的發射協同和火力兼容問題展開,如垂直發射武器系統火力兼容問題[2]。文獻[3-7]建立了艦艇兩兩武器間火力散布體交叉的時空模型并進行火力交叉判斷,文獻[8-9]提出了防空作戰空間資源占用和協調模型,文獻[10-11]通過協調導彈發射間隔來避免火力沖突。上述研究中,導彈彈道誤差主要考慮發射艦艇縱橫搖和導彈制導等誤差,而編隊作戰中,平臺導航誤差是否會對不同平臺發射導彈的火力沖突判定造成影響,尚未展開深入研究。此外,目前沖突消解的方法主要對導彈進行緩射或停射處理,但如何確定緩射時間仍需要快速有效的方法。
本文以垂直發射的艦空導彈為例,在編隊地理坐標系中建立了導彈飛行空間模型,著重考慮了平臺導航誤差對彈道散布的影響;建立了火力沖突判斷模型并提出了2種用于火力沖突消解的緩射時間計算方法。
1 垂直發射艦空導彈運動學模型
建立艦艇穩定坐標系,規定發射艦艇中心為坐標原點,y軸為航向線指向艦首方向,x軸在水平面內與y軸垂直并指向艦艇右舷,z軸垂直水平面指向天頂。導彈的運動模型可以表示為[12-14]
(1)
式中:vd(k)為導彈飛行速度大小;φd(k)為導彈飛行傾角;βd(k)為導彈飛行偏航角,傾角和偏航角統稱為導彈飛行姿態角;Δt為離散時間步長,它們在垂直發射艦空導彈飛行過程的各階段如下變化:
(1) 垂直上升段(t0至t1時刻),導彈飛行姿態角保持不變,導彈發動機提供的加速度為αt,則速度vd大小為
(2)
式中:t∈[t0,t1],(φd(t0),βd(t0))為導彈飛離發射架時的初始姿態角。
(2) 程序轉向段(t1~t2時刻),假定導彈飛行速度大小vd不變,其飛行姿態角將由初始姿態角(φd(t0),βd(t0))逐漸調整為制導起控點飛行姿態角(φ0,β0)。
(3) 制導飛行段(t2~t3時刻),假定導彈飛行速度大小vd不變,其飛行姿態角(φd(k),βd(k))根據一定導引方式不斷調整直至命中目標。
2 導彈飛行空間模型
導彈在飛行過程中受各種因素干擾,實際飛行彈道與理論彈道之間存在偏差,形成以理論彈道為中心的散布體。對導彈彈道進行沖突判斷和消解,需要建立囊括實際飛行彈道的導彈飛行空間模型。
2.1 導彈飛行誤差
導彈飛行誤差引起的彈道散布rd按照導彈的3個飛行階段可以描述為
(3)
式中:rss為垂直上升段彈道散布;rzx為程序轉向段彈道散布;rzd為制導飛行段彈道散布,前一飛行階段的彈道散布均將疊加到后續階段中。
2.1.1 垂直上升段

(4)
由式(4)可推得實際飛行方向與理論飛行方向的夾角γ和初始姿態角(φd(t0),βd(t0))為
(5)

(6)
2.1.2 程序轉向段
程序轉向段影響導彈飛行彈道的因素包括制導起控點飛行姿態角(φ0,β0)、目標跟蹤誤差、導彈在垂直上升段結束時的位置和速度,根據起控點諸元計算方法[14],得到導彈實際制導起控點位置與理論制導起控點位置的偏移rd(t2)。則程序轉向段導彈飛行誤差引起的彈道散布半徑為
(7)
2.1.3 制導飛行段
導彈垂直上升段和程序轉向段產生的速度、姿態角誤差積累到導彈制導起控點,視為導彈制導飛行段的初始擾動(Δvd,Δφ,Δβ),但飛行姿態角誤差在下一時刻將被消除[15],速度誤差Δvd成為影響制導飛行段彈道散布的主要因素。
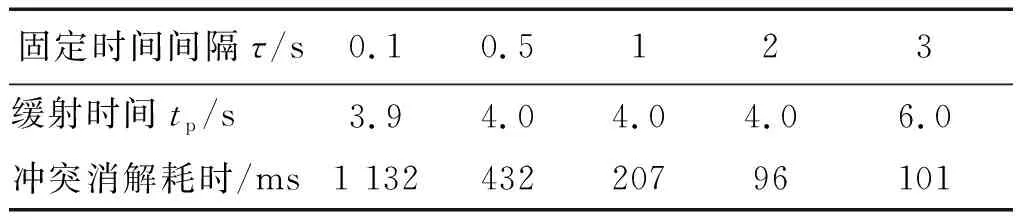
由于速度誤差Δvd的存在,導彈實際飛行時間tz與理論飛行時間t3存在差異,命中目標的實際炸點Z′與預計炸點Z也隨之變化。如圖1所示,以Oxy平面為例,若導彈實際飛行速度較快,即tz 圖1 制導飛行段彈道散布Fig.1 Ballistic dispersion in guided flight section 為滿足安全裕度,t3時刻導彈飛行誤差引起的彈道散布可以用|D′Z+ZZ′|表示,即rd(t3)=(v′+vm)·|t3-tz|,其中,v′=max{vd,vd+Δvd},vm為目標飛行速度大小,制導飛行段導彈飛行誤差引起的彈道散布半徑為 (8) 編隊火力沖突判斷與消解,需要將其他平臺艦空導彈彈道位置信息從各平臺穩定坐標系下,經坐標變換為編隊地理坐標系下的坐標。而平臺存在包括自身位置誤差和航向誤差在內的導航誤差,以及時統誤差等,相比單平臺火力沖突判斷過程,由于時統誤差較小,一般達微妙以下可不考慮,而導航誤差不能忽略。 建立編隊地理坐標系時,以編隊中心為坐標原點,y軸指向正北方向,z軸垂直水平面指向天頂,建立右手坐標系,如圖2所示。編隊內艦艇平臺導航系統向編隊指控系統提供了平臺位置坐標(Jx,Jy)和航向Cw,由艦艇穩定坐標系中的坐標(xp,yp,zp)變換到編隊地理坐標系(xb,yb,zb)的過程為 圖2 編隊地理坐標系Fig.2 Formation geographic coordinates (9) (10) 由式(9),(10)可知,經過坐標系變換,導彈在編隊坐標系中的位置與實際位置存在偏差為 由圖1可知,可能偏差隨著粒度的減小呈現急劇增大的趨勢。其原因是,在粒度較小時,顆粒密度對沉降速度的影響逐漸減弱,沉降速度的絕對值變化較小,因而在粒徑較小的范圍內出現等速沉降的頻率要遠大于粒徑較大的范圍,這導致分選效率較低。因此要實現粉煤物料按照密度分選,需擴大不同密度顆粒之間的沉降末速,減少出現等沉顆粒的比例。 (11) 假定分別存在位置誤差Δdw和航向誤差ΔCw,該點經過坐標變換后與實際位置存在的位置偏移如3所示。其中,航向誤差ΔCw對坐標變換后偏移量的影響與原坐標位置有關,原坐標位置距離原點越遠,偏移量越大。 根據垂直發射艦空導彈理論飛行彈道模型和導彈飛行誤差、平臺導航誤差,建立以理論彈道為軸線、兩類誤差引起的彈道散布極值為半徑的管道模型來描述的導彈飛行空間模型。其中平臺導航誤差將影響彈道全過程,平臺導航誤差影響導彈飛行全過程,與導彈飛行誤差一起決定了導彈飛行空間,最終可得到導彈飛行空間半徑: (12) (1) 火力沖突判斷 由導彈飛行空間模型,可以得到編隊坐標系下艦空導彈的實時位置Di(t)=(xd(t),yd(t),zd(t))和飛行空間半徑ri(t),如圖4所示。若2枚導彈的實時位置間距小于飛行空間半徑之和,則判定為2枚導彈發生了火力沖突,即 圖3 平臺導航誤差引起的位置偏移Fig.3 Position shift caused by platform navigation error 圖4 兩枚導彈沖突判定規則Fig.4 Schematic diagram of two missile collision judgment (13) (2) 火力沖突消解 目前,沖突消解通常采用緩射或停射的方式進 行。當沖突發生時,需要確定任務優先級較低的導彈能否通過緩射來避免沖突,并確定緩射時間tp。由于導彈緩射形成新的彈道,需要重新進行空間沖突判斷,因此緩射時間的確定是一個迭代計算過程。根據問題的已知條件,給出以下2種緩射時間確定方法。 1) 基于固定間隔時間計算tp 2) 基于已知沖突信息計算tp 根據沖突時2彈飛行空間半徑之和(r1(t)+r2(t))和2彈實際距離|D1(t)D2(t)|,當它們差值最大時,確定Rmax=r1(t)+r2(t),則緩射時間 (14) 式中:vd為待緩射導彈的飛行速度。 若考慮沖突判斷和消解計算時間tj,則實際輸入給武器系統的緩射時間為tp-tj。 當同時存在多條需進行火力沖突判斷的彈道時,按防空任務優先級從高到低,分別將導彈與所有優先級較高的導彈進行沖突判斷與消解,其流程如圖5所示。 圖5 火力沖突消解流程Fig.5 Fire conflict resolution process 規定平臺位于坐標系原點,仿真初值設置為:空中目標位于(24,40,10)km,速度200 m/s,航向200°,俯沖0°。假定誤差服從正態分布,相關誤差標準差σ設定為:平臺導航系統中定位誤差40 m,航向誤差0.2°;平臺縱搖3°,橫搖3°;導彈發動機加速度誤差0.15g,目標定位跟蹤測距誤差50 m,高低角誤差0.25°,偏角誤差0.5°。將上述誤差設定為仿真的基礎誤差組。由式(1)~(12),對導彈飛行空間進行2 000次仿真,選取誤差極值為3σ,得到該導彈攔截過程中飛行空間管道半徑和實際彈道散布如圖6所示。 圖6 導彈飛行空間模型Fig.6 Missile flight space model 仿真結果表明,導彈飛行空間模型囊括99.9%的實際飛行彈道,用于火力沖突判斷是有效的。 為進一步分析平臺導航誤差對導彈飛行空間及對后續沖突判斷的影響,在4.1節基礎誤差組的基礎上將平臺導航誤差劃分為不同大小的7組誤差再進行仿真,其中組1為零誤差,組4為基礎誤差,如表1所示。不同誤差條件下導彈飛行空間半徑仿真結果如圖7和表2所示。 表2中飛行空間半徑后括號內的數字表示與零導航誤差相比飛行空間半徑的放大倍數。從圖7和表2可以看出,導航誤差越大,對飛行空間半徑的影響越大。相比零誤差,當平臺導航誤差達到(40 m,0.2°)時,上升段和轉向段結束時的飛行空間半徑分別增大16.5%和27.1%;平臺導航誤差達到(100 m,0.5°)時,上升段和轉向段結束時的飛行空間半徑增大80.0%和73.8%。制導段由于導彈制導系統會對彈道進行修正,因此平臺導航誤差對制導段結束時的飛行空間半徑影響較小。 表1 平臺導航誤差組Table 1 Platform navigation error group 圖7 不同平臺導航誤差下的導彈飛行空間半徑Fig.7 Flight space radius under different navigation errors 誤差組上升段飛行空間半徑/m轉向段飛行空間半徑/m制導段飛行空間半徑/m1283.4(100.0%)670.8(100.0%)1 181(100.0%)2286.6(101.1%)712.8(106.3%)1 181(100.0%)3295.8(104.3%)757.3(112.9%)1 184(100.3%)4330.3(116.5%)852.4(127.1%)1 193(101.0%)5380.9(134.4%)953.3(142.1%)1 208(102.2%)6442.2(156.0%)1 058(157.7%)1 228(104.0%)7510.2(180.0%)1 166(173.8%)1 254(106.2%) 考慮到艦空導彈火力沖突判斷是基于導彈飛行全過程彈道進行判斷,因此編隊作戰條件下火力沖突判斷不能忽略平臺導航誤差的影響。 取參考系為編隊地理坐標系,設2艘艦艇航向45°,位置坐標分別為(0.5,1) km和(5,4) km,裝備的艦空導彈加速度為11g,垂直上升段結束時間t1=5 s,程序轉向段結束時間t2=8 s。T0時刻,出現2批空中目標:目標1位于(30,44,10) km,速度300 m/s,航向230°,俯沖為0°;目標2位于(20,33,10) km,速度200 m/s,航向220°,俯沖為-5°。 設導彈1和導彈2分別打擊目標1和目標2,仿真步長為0.1 s,理論飛行彈道仿真如圖8所示。 圖8 導彈理論飛行彈道仿真Fig.8 Missile theoretical flight trajectory simulation (1) 火力沖突判斷仿真 設定沖突檢測步長為0.1 s,由式(13)仿真得導彈1在飛行51.2 s后與導彈2發生沖突,2枚導彈沖突判斷耗時T(2)=9 ms。多枚導彈火力沖突判斷時,每枚導彈要與所有任務優先級更高的導彈進行兩兩判斷,則n枚導彈完成沖突判斷需要用時:T(n)=0.5n(n-1)T(2),n取不同值時仿真10次的平均計算耗時如表3所示。 表3 火力沖突判斷用時Table 3 Time of check of fire conflict 通常情況下區域協同防空需要進行沖突判斷的彈道數不多,沖突判斷計算耗時可滿足作戰實時性要求。 (2) 火力沖突消解仿真 假定導彈1任務優先級較低,由圖5沖突消解流程,分別采用2種方法確定緩射時間。 1) 基于固定間隔時間計算tp 設置不同固定時間間隔τ的沖突消解結果如表4所示。 表4 不同τ的沖突消解結果Table 4 Conflict resolution results of different τ 其中,設置迭代的固定時間間隔τ=0.1 s可檢驗最短需要的緩射時間,即tp min=3.9 s。 2) 基于已知沖突信息計算tp 由式(14),在第1次迭代中求得Rmax=2 280 m,緩射時間tp=4.5 s,接近最短需要的緩射時間,一次迭代即消解了沖突,用時58 ms。 (3) 仿真結論 由仿真結果可知: 1) 2種確定緩射時間的方法都可以完成沖突消解。 2) 固定緩射時間τ過小會導致迭代次數過多,沖突消解計算時間過長;τ太大,會導致緩射時間過長,影響作戰效率;實際中應參考防空任務時間窗口設置τ值。 3) 通過沖突判斷的先驗信息計算緩射時間,一定程度上可降低計算的盲目性,能夠較快實現沖突消解。 此外,多枚導彈火力沖突消解,要按任務優先級由高到低依次對每一枚導彈進行沖突消解,其耗時與導彈數量、兩兩導彈沖突消解時間及沖突的復雜程度有關。 本文在建立導彈理論彈道模型的基礎上,分析了導彈彈道誤差,建立了導彈飛行空間模型,提出了一種編隊區域防空導彈火力沖突判斷和消解的方法。仿真結果表明,平臺導航誤差對導彈飛行空間有影響,在編隊火力沖突判斷中不應忽視,編隊防空導彈火力沖突判斷和2種導彈緩射時間計算耗時短,方法有效,可以為編隊火力兼容和多平臺協同作戰中的武器運用提供參考。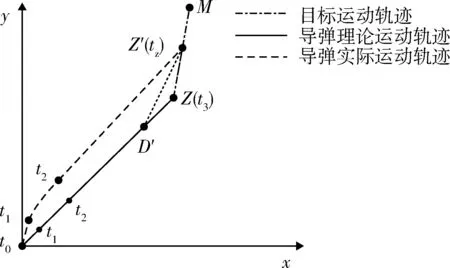
2.2 平臺導航誤差

3 導彈區域防空火力沖突判斷與消解

4 算例仿真
4.1 垂直發射艦空導彈飛行空間模型仿真
4.2 平臺導航誤差對飛行空間影響仿真
4.3 導彈火力沖突判斷與消解仿真

5 結束語