動力陀螺式導引頭動力學建模與分析
2019-08-23 01:20:06亢有為陳東方
空天防御 2019年3期
亢有為,王 楓,陳東方,沈 莉
(1. 上海機電工程研究所,上海 201109; 2. 上海航天控制技術研究所,上海 201109)
0 引 言
導引頭技術是精確制導武器的核心技術,用來完成對目標的自主搜索、識別和跟蹤,并輸出制導律所需要的控制信號。導引頭的主要功能有:①隔離或消除彈體姿態角擾動,實現光軸空間指向的穩定;②截獲并跟蹤目標;③輸出實現導引規律所需的信息,如采用比例導引法時就需要導引頭輸出目標視線角速度。
導引頭的性能指標直接影響導彈的制導精度,而導引頭最關鍵的性能指標之一就是其解耦能力和跟蹤能力。為了進一步分析導引頭的性能,必須建立動力學模型。目前國內大部分文獻[1-6]都以陀螺的進動角作為狀態量進行建模。這種方法雖然可以描述導引頭工作的各物理環節,但并不能體現導引頭動力學的本質。本文以動力陀螺式導引頭為例,以失調角(光軸與視線軸之間的夾角)為狀態量對導引頭進行建模[7],從動力學穩定性的角度分析了影響導引頭解耦性能和跟蹤性能的因素,并通過數字仿真驗證了模型的準確性,可為動力陀螺式導引頭的設計和試驗結果分析提供理論指導。
1 動力陀螺式導引頭工作原理
導引頭從結構上可分為位標器和電子艙兩大部分,其中,位標器位于導引頭前端,負責探測和跟蹤目標,同時隔離彈體姿態運動以保持光軸的定軸性(通常簡稱為解耦能力)。位標器的功能是保持空間穩定,它是導引頭實現角跟蹤及其他功能的基礎。導引頭按照位標器實現空間穩定的方式不同,可以分為動力陀螺式、速率陀螺式、積分陀螺式、捷聯式4種[8],如圖1所示。

圖1 導引頭分類Fig. 1 Seeker classification
其中,動力陀螺式又分為動力隨動陀螺式和陀螺隨動框架式。本文主要分析動力隨動陀螺式導引頭,后文簡稱為動力陀螺式導引頭。動力陀螺式導引頭只能穩定導引頭光軸,通常用于跟蹤點源式目標,其位標器結構如圖2所示。
圖2 動力陀螺式導引頭位標器結構Fig. 2 The structure of gyro-rotor (gyro-stabilized seeker)
動力陀螺式導引頭采用三自由度陀螺作為跟蹤機構,探測器和光學系統安裝在陀螺轉子上,光軸與轉子軸重合,且基座固連于彈體,進動線圈也固連于彈體。
目標輻射或反射的信號經光學系統聚焦于探測器焦平面,探測器將目標信號轉化為失調角電信號;電子艙對失調角信號進行處理,生成成比例的誤差跟蹤電流并輸出給與彈體固連的進動線圈;通過陀螺磁場與進動線圈磁場的相互作用,陀螺的轉子軸向視線方向進動,從而減小光軸與視線軸之間的失調角,實現導引頭對目標的閉環跟蹤。動力陀螺式導引頭工作原理如圖3所示。
圖3 動力陀螺式導引頭工作原理Fig. 3 The working principle of gyro-stabilized seeker
動力陀螺式導引頭的一個重要特點是依靠位標器陀螺轉子的定軸性來實現光軸的穩定和解耦,同時利用陀螺的進動性來實現光軸轉動跟蹤。動力陀螺式導引頭存在以下缺點:首先,定軸性和進動性存在矛盾,動力陀螺式導引頭的解耦能力主要依靠陀螺的定軸性來保證,但提高定軸性會影響進動性,因而這類導引頭的快速跟蹤能力有限;其次,由于內框式導引頭的進動線圈固連于彈體,導引頭控制力矩會隨導引頭光軸與彈體軸之間失調角的增大而減小,這種電磁形式控制力矩獲取方式使得導引頭無法產生較大的控制力矩,從而導致動力陀螺式導引頭在大離軸角下無法實現對大機動目標的跟蹤。
2 導引頭動力學建模
2.1 坐標系定義
根據導引頭動力學建模的需要,本文定義了以下5個坐標系[9]。
1)Ogab——慣性坐標系。原點位于導彈質心,Og指向導彈飛行方向,Oa的正向豎直向上,Ob依據右手定則而得。
2)Ox1y1z1——彈體坐標系。原點位于導引頭回轉中心;Ox1軸為彈體的縱向對稱軸,指向彈頭方向為正;Oy1軸位于彈體縱向對稱面內,與Ox1軸垂直,向上為正;Oz1軸與Ox1軸、Oy1軸構成右手坐標系。彈體坐標系由慣性坐標系依次通過偏航角ψ,俯仰角?和滾轉角γ獲得。
3)OXYZ——導引頭光軸坐標系。原點位于導引頭回轉中心,OX軸為光學系統軸,OY軸為內環軸,OZ軸通過右手定則得到。該坐標系是彈體坐標系繞Oy1軸轉φry和繞OZ軸轉φrz后形成的。
4)導引頭陀螺坐標系。陀螺坐標系是由導引頭光軸坐標系繞OX軸轉γX后形成的。
5)Oxyz——目標視線坐標系。原點位于導引頭回轉中心,Ox軸為目標視線軸,Oy軸在彈體縱平面內與Ox垂直,Oz軸通過右手定則確定。該坐標系是彈體坐標系繞Oy1軸轉φsy和繞Oz軸轉φsz后得到。
上述各坐標系間的關系如圖4所示。
圖4 坐標系間的關系Fig. 4 The relationship between coordinate systems
2.2 導引頭動力學模型建立
假定導引頭已進入跟蹤狀態,如圖5所示,從彈頭方向看去,目標信號在探測器上成像或形成脈沖。經解算,目標在光軸坐標系下偏航和俯仰方向上的失調角分別為α和β。為使導引頭光軸指向目標視線,需要在OY軸正向上施加控制力矩MY來減小偏航方向上的失調角α;在OZ軸正向上施加控制力矩MZ來減小俯仰方向上的失調角β。控制過程為:將由電子艙功率放大后的電流信號發送到力矩器,產生一個進動力矩,施加在陀螺框架軸上,使陀螺發生進動,從而驅動導引頭光學系統不斷跟蹤目標。
圖5 陀螺運動分析簡圖Fig. 5 The schematic diagram of gyro motion analysis
進入力矩器的電流與導引頭失調角成正比,記為
I=k0·A
(1)
式中:I為進入力矩器的兩個方向上的電流信號;A為兩個方向上的失調角信號,A=α,β;k0為對應的比例系數,在光軸坐標系中得出
(2)
式中:k1為導引頭失調角力矩器轉換系數;k為失調角與力矩的轉換系數。ωp為光軸系下視線角速度矢量,彈體系中的視線角速度矢量與ωp轉換關系為
(3)
視線系中的視線角速度矢量與ωp轉換關系為
(4)
由于導引頭中的失調角α和β都較小,經過小角度假設,式(4)等價為
(5)
聯立式(3)~(5),簡化可得
(6)
(7)
(8)
用Ω表示轉子相對于彈體的自轉角速度,求出轉子的絕對角速度在陀螺坐標系上的投影為
(9)
由剛體定點轉動歐拉動力學方程得到在光軸坐標系下的導引頭動力學方程為
(10)
其中
(11)
式中:MX、MY、MZ為相對于光軸系各軸的外力矩;HX,HY,HZ為導引頭轉子相對于光軸系各軸的動量矩,并令HY=HZ=H;JX,JY,JZ為導引頭轉子相對于光軸系各軸的轉動慣量,并令JY=JZ=Jr。
(12)
(13)
聯立方程(6)~(13),不考慮旋轉磁場對進動的影響,忽略內環及外環框產生的轉動慣量,RY(t)、RZ(t)為高階小量,令

(14)
3 動力陀螺式導引頭動力學分析
動力陀螺式導引頭的動力學性能決定了導引頭的跟蹤性能。導引頭動力學模型是4階的,其中兩個模態屬于導引頭的高階模態,即章動。正是由于導引頭高階模態的存在,當其開環增益增大時導引頭會趨向于不穩定,從而限制了導引頭的跟蹤能力。導引頭高階頻率的衰減是導引頭動力學設計時必須考慮的因素,在保證導引頭性能穩定的前提下,可通過增大導引頭開環增益來提高導引頭的跟蹤性能。
3.1 解耦性分析
為了研究導引頭的穩定性,可先假定目標視線角速度為零,目標視線的角速度分量ωsx、ωx1很小可以忽略,忽略干擾力矩MdY、MdZ和高階小量RY(t)、RZ(t)的影響,且由于Jr、C和k、H相比較小,可暫時忽略其影響。對式(14)進行拉氏變換可得
(15)
式中:
分析可知,隨著陀螺動量矩H及k的增大,導引頭穩定性能越來越好。由于在實際導引頭中C值較小,彈體擾動主要是通過干摩擦力矩影響失調角。由于自動駕駛儀信號取自失調角信號,所以希望彈體擾動所引起的失調角為0。在實際應用中,可以獲得導引頭未進動時的干摩擦力矩或通過一定的辨識方法獲得導引頭進動過程中的干摩擦力矩。利用上述干摩擦力矩對彈體擾動引起的失調角進行補償,可以減小彈體擾動對導引頭解耦性能的影響。
3.2 跟蹤性分析
導引頭跟蹤性能主要考慮導引頭的品質因數、最大跟蹤角速度、響應時間常數、跟蹤精度。
導引頭品質因數定義為
Q=ω/a
(16)
式中:ω為視線角速度,單位為(°)/s;a為跟蹤狀態下導引頭光軸指向相對于目標視線的滯后角度,單位為(°),通常稱為失調角。
為了研究導引頭的跟蹤能力,先不考慮彈體的擾動,目標視線的角速度分量ωsx、ωx1很小可忽略,同時忽略干擾力矩MdY、MdZ及高階小項RY(t)、RZ(t)的影響。考慮目標視線機動的頻率不大,對式(14)進行拉氏變換可得
(17)
忽略干摩擦力矩對失調角的影響,并且失調角角速度的頻率不大于轉折頻率k1/H時,控制系統穩態時得到
(18)
將式(18)代入式(16)可得
(19)
從動力學角度分析式(14)的穩定性,由式(14)得出控制系統的特征多項式為
Δ(s)=[s(Jrs+C)]2+(k+Hs)2=
(20)
根據勞斯判據得到穩定性條件為
(21)
假設4次方程的根分為模值較大與模值較小的兩組,依據近似求根法將式(20)分別近似為:
1) 對于模值很大的根,原式(20)可近似為
(22)
求解得到
(23)
2)對于模值很小的根,原式(20)的近似為
H2s2+2kHs+k2=0
(24)
求解得到
(25)
4 測試與仿真分析
基于導引頭動力學模型開展數字仿真,通過對比數字仿真結果和半實物結果驗證所建立模型的正確性,并分析導引頭的解耦性能和跟蹤性能。將導引頭實際參數代入導引頭動力學模型式(14),并考慮導引頭控制系統中采樣保持、力矩器的限幅和功率放大器的一階慣性延遲。模型中采用陀螺轉子動量矩H=26.46 N·cm·s,導引頭轉子繞赤道軸的轉動慣量Jr=0.049 N·cm·s2,摩擦力矩Mgm=0.098 N·cm,比速度摩擦力矩系數C=1.1×10-2N·cm/(rad·s-1),在Simulink下進行仿真計算。
在俯仰方向視線角速度為10 (°)/s,偏航方向視線角速度為0 (°)/s時,輸入和輸出結果如圖6所示。其中:UU為視線角速度輸入信號;Uy為偏航方向輸出信號;Uz為俯仰方向輸出信號。仿真結果顯示輸出信號存在一定量的超調,但達到穩態后與輸入信號吻合較好,且偏航和俯仰兩個方向的耦合度較低。
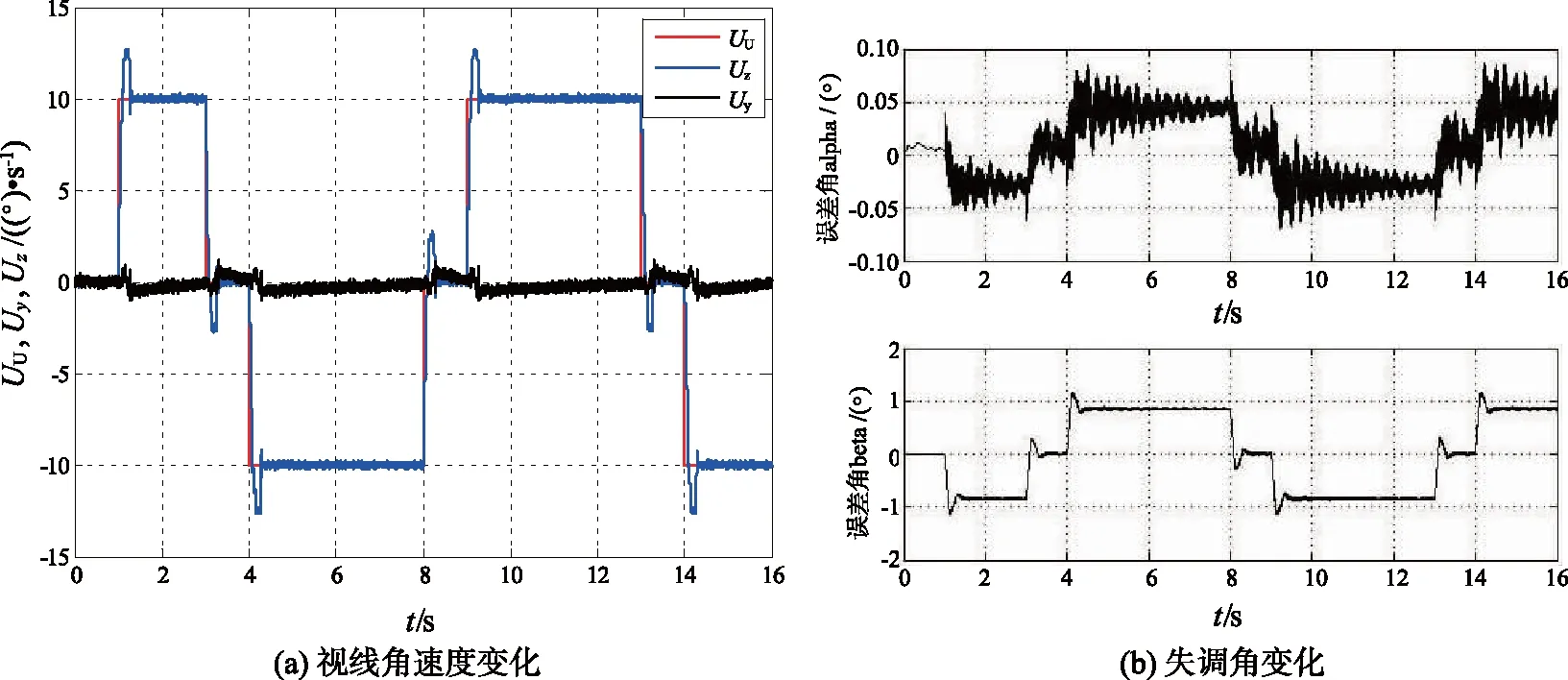
圖6 視線角速度輸入輸出和失調角變化Fig.6 The input-output of LOS angular velocity and the variation of misalignment angle
在偏航方向視線角速度為0 (°)/s,俯仰方向為8 (°)/s時,進行數學仿真與半實物仿真,結果如圖7所示。兩組曲線基本相同,數學仿真輸出延遲時間約0.1 s,超調2 V,而且輸出幅值都有波動,波動幅值為0.25 V。數學仿真結果與半實物仿真結果存在差別的原因是:實際電路中的零偏誤差、高斯噪聲、陀螺內外環軸與框架間的干摩擦以及比速度摩擦力矩系數不精確等。
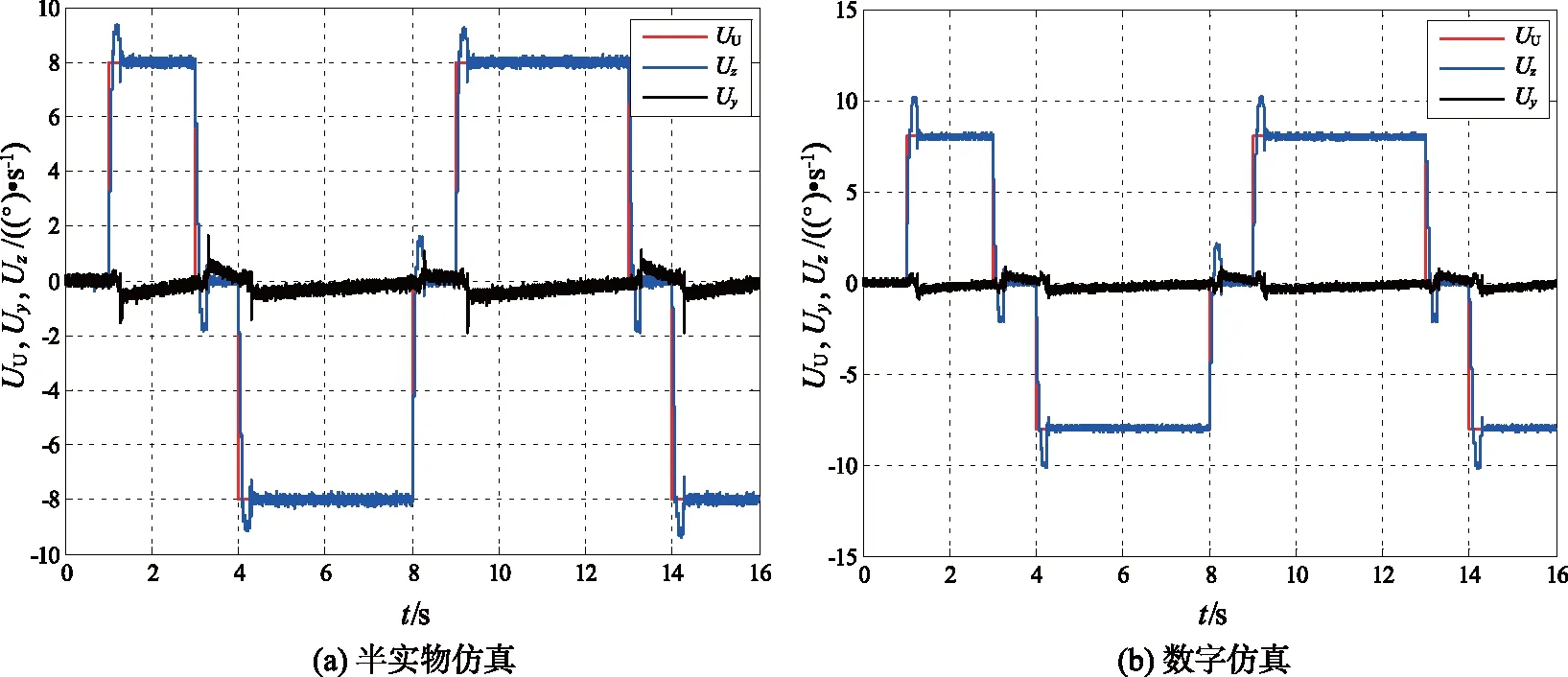
圖7 半實物與數學仿真結果對比Fig. 7 The comparison of hardware-in-loop simulation and mathematical simulation
5 結束語
本文介紹了動力陀螺式導引頭的工作原理,重點分析了動力陀螺式導引頭的動力學模型,通過分析得出影響導引頭解耦性能和跟蹤性能的重要參數。分析表明,導引頭轉子轉動慣量和導引頭阻尼系數對導引頭穩定性有決定性的影響。通過對比數字仿真和半實物仿真結果,驗證了所建動力學模型和解析結果分析的準確性,并分析了數字仿真和半實物仿真存在偏差的原因。
