臨近空間飛行器的魯棒控制器設計
2019-08-23 01:20:04趙宏宇鐘繼鴻王孟渝蔡志俊
空天防御 2019年3期
王 鑒,趙宏宇,鐘繼鴻,王孟渝,蔡志俊
(上海機電工程研究所,上海 201109)
0 引 言
近幾年來,臨近空間飛行器的戰略價值引起了世界各國的重視,同時也因其顯著的優點和軍民兩用的潛在價值而成為研究熱點。但從整體發展水平看,臨近空間飛行器的廣泛應用目前仍處于關鍵技術攻關階段。
臨近空間飛行器具有發射平臺多樣、飛行速度快、可機動、多彈道變化、突防能力強和能夠打擊時間敏感目標等突出優勢,對傳統的防空反導防護體系提出了嚴峻的挑戰。
臨近空間飛行器的飛行高度和馬赫數跨度范圍較大,氣動特性變化劇烈,且無法預知飛行擾動[1]。為解決這一問題,嘗試采用H∞混合靈敏度魯棒控制方法,引入加權函數,由加權函數直接反映系統的各項性能指標,研究被控對象的魯棒性,同時驗證系統的性能改善情況。
1 混合靈敏度控制思想
飛行器的不確定性反饋控制系統結構如圖1所示。

圖1 飛行器不確定性反饋控制系統結構Fig.1 Structure of flight vehicle’s uncertainty feedback control system
式中:r、e、u、d和y分別是被控系統的外部輸入、誤差信號、控制器輸出、外部擾動輸入和被控系統的輸出的測量值;G(s)為被控對象;K(s)為所設計的H∞混合靈敏度魯棒控制器。
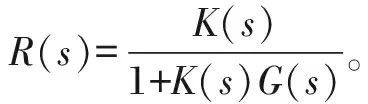
定義靈敏度函數S(s)為
(1)
式中:S(s)是干擾d與輸出y以及誤差e與輸入r之間的閉環傳遞函數。S(s)越小,系統的干擾抑制能力越強,系統的跟蹤誤差越小。
定義補靈敏度函數T(s)為
(2)
由于T(s)制約系統輸出信號的大小,因此,T(s)決定系統魯棒穩定性[2]。
綜上,為了使被控制系統具備魯棒性,且可抑制干擾輸入和精確跟蹤指令信號,希望控制系統的S(s)奇異值和T(s)奇異值能夠同時達到最小。
由于擾動具有低頻特性,模型不確定性往往是由于忽略高頻特性引起的,因此可在不同頻段設計S(s)和T(s)。引入性能加權函數WS(s)、控制器輸出加權函數WR(s)和魯棒加權函數WT(s),并修改飛行器的不確定性反饋控制系統為標準H∞控制結構,如圖2所示。
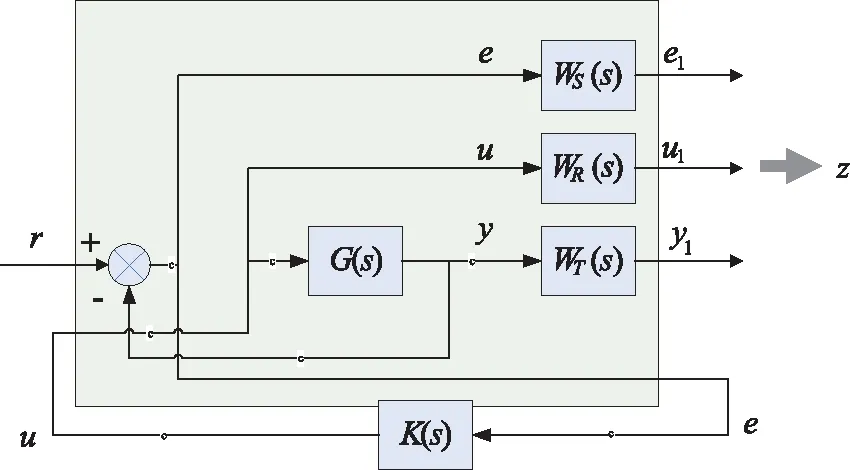
圖2 標準控制結構Fig.2 Standard control structure
圖2中,z是被控制的輸出;e1、u1、y1分別為e、u、y被控制的輸出。
則系統從輸入r到輸出z的傳遞函數為
(3)
H∞混合靈敏度最優控制問題的本質為:設計控制器K(s),使被控對象系統穩定,并且滿足Tzr<γ(γ為系統的性能指標),提高系統性能。
2 縱向H∞混合靈敏度魯棒控制器設計
2.1 飛行器縱向運動方程
以某型臨近空間飛行器為被控對象,通過求取飛行器在給定高度和飛行速度的平衡狀態,在平衡點對其數學模型進行小擾動線性化處理,并忽略機體和舵面下洗的動力系數小量,得到飛行器空中飛行的縱向短周期運動的狀態空間方程為[3]
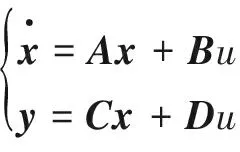
(4)

2.2 縱向H∞混合靈敏度魯棒控制器設計
縱向控制器的首要任務是保證飛行器精確跟蹤整個飛行基準彈道。
臨近空間飛行器的飛行包線寬廣,氣動特性變化劇烈,是復雜的時變不確定性系統,其不確定性包括:模型的動態特性偏差、大包線內的飛行參數劇烈變化以及大氣擾動等不確定性干擾。采用H∞混合靈敏度魯棒控制方法,引入加權函數,使得被控系統具備魯棒性和較高的系統性能,可快速跟蹤指令信號,有效抑制各項不確定性干擾。
基于實際情況,如果在高度回路設計魯棒控制器,將會導致系統縱向控制器的階次過高,不符合實際工程應用需求。因此,在俯仰角回路采用H∞混合靈敏度魯棒控制設計方法。為了使系統穩定,并且降低控制器階次,采用比例法設計系統的增穩回路。
俯仰角回路H∞混合靈敏度魯棒控制器的設計結構如圖3所示[4]。
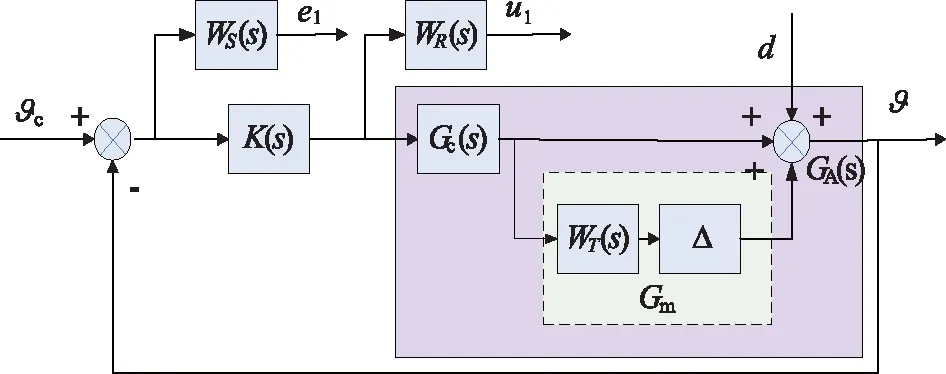
圖3 H∞混合靈敏度魯棒控制器的結構Fig.3 Structural block diagram of mixed sensitivity robust controller
圖3中:?c為輸入俯仰角指令;Gc(s)為標稱控制對象;GA(s)為實際控制對象;Gm為非結構型輸出端不確定性模型;d為外界干擾輸入;?為回路實際俯仰角輸出。
增加角速度和攻角內反饋回路作為系統的增穩回路,控制模型不確定的范圍。
在保證系統穩定性的
前提下,降低系統縱向控制器的階次。最終設計的標稱控制對象Gc(s)如圖4所示。

圖4 標稱控制對象Gc(s)結構Fig.4 Block diagram of nominal control object Gc(s)
2.3 選取標稱控制對象
標稱控制對象的選取過程為:首先,分析飛行器的飛行包線并選定合適的特征點;其次,繪制特征點處數學模型的奇異值Bode圖,選取奇異值居中的那個特征點作為標稱控制對象[5]。
某型臨近空間飛行器從0Ma開始加速爬升,當飛行速度為4Ma時進行高空巡航飛行[6]。由于飛行器在加速爬升階段的飛行高度和飛行馬赫數跨度范圍較大,氣動特性變化劇烈。為此,選取加速爬升階段的6個飛行狀態作為特征點,設計縱向通道的H∞混合靈敏度魯棒控制器。所選取的6個特征點的飛行狀態如表1所示。

表1 6個飛行狀態特征點Tab.1 Six flight state characteristic points
繪制選定特征點的奇異值 Bode 圖,如圖5所示。
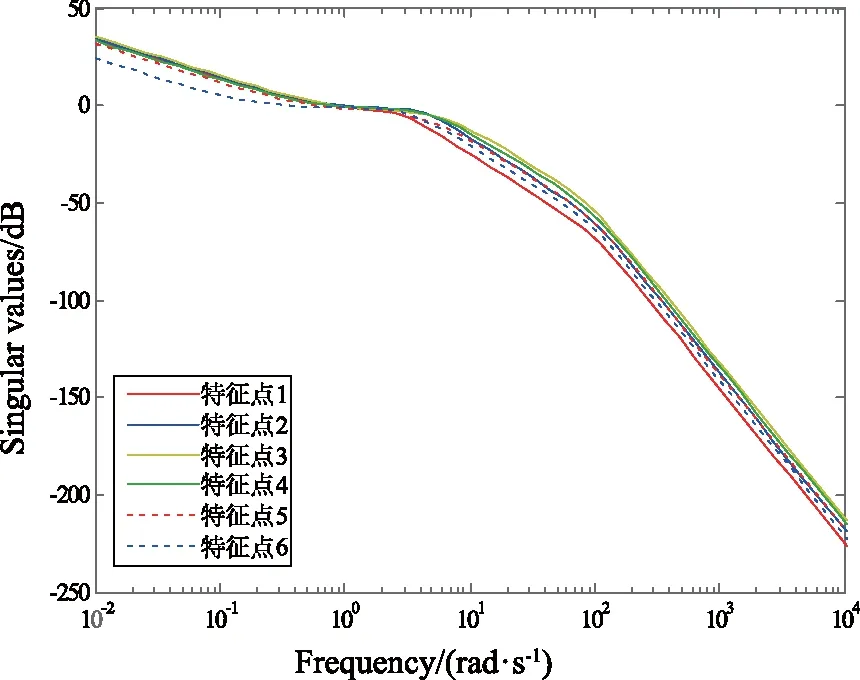
圖5 選定的6個特征點的奇異值Bode圖Fig.5 Singular value Bode graphs of six selected characteristic points
由圖5可以看出,雖然6個特征點的曲線規律類似,但是飛行器的空域跨度較大,綜合衡量,選取特征點4(Ma=1.5,H=10 km)所對應的狀態空間模型作為標稱控制對象,進行H∞混合靈敏度魯棒控制器的設計分析。
2.4 選取加權函數
H∞混合靈敏度魯棒控制器設計的本質是由加權函數直接反映系統的各項性能指標要求。當選定標稱控制對象后,加權函數的選取就成為設計控制器至關重要的一步,合理的加權函數可以提高系統的動態品質、系統魯棒性以及系統的抗干擾能力等。
1) 設計性能加權函數WS(s)
WS(s)是對靈敏度函數S(s)的加權函數,根據系統性能的要求而選取。WS(s)應具有積分特性或者高增益低通特性,以增強對干擾的抑制能力。在低頻段,WS(s)的增益值應盡量大,以使S(s)盡量小,這樣可以有效抑制干擾的影響或精確地跟蹤輸入信號。在高頻段,為了使被控系統的超調量在一定的范圍內,宜將WS(s)的幅值設置在0.1~0.8區間范圍內,此時對應的S(s)的增益為0 dB,且在全頻域范圍內,S(s)的最大奇異值小于WS-1(s)的最大奇異值[7]。
本文在保證系統魯棒穩定的前提下,設計的性能加權函數為
(5)
在Matlab/Simulink中繪制WS-1(s)和S(s)的奇異值特性曲線,如圖6所示。

圖6 WS-1(s)和S(s)的奇異值特性曲線Fig.6 Singular value characteristic curve of WS-1(s) and S(s)
由圖6可知,靈敏度函數S(s)的最大奇異值在全頻域內小于WS-1(s)的最大奇異值,設計的WS(s)滿足性能加權函數的設計要求。
2) 選取魯棒加權函數WT(s)
WT(s)是對補靈敏度函數T(s)的加權函數,代表乘性攝動的范數界,反映系統對魯棒穩定性要求,即系統高頻性能需求。因此,在高頻段,選取具有高通特性的WT(s)函數,以消除模型不確定性的影響。此外,為了抑制高頻干擾的影響,WT(s)應具備較大的高頻段增益及較小的低頻段增益。在低頻段,模型參數變化引起的等效模型誤差的最大奇異值應大于WT(s)的最大奇異值。
模型不確定性用輸出端乘性不確定性表示時,Gc(s)和Gci(s)的關系為
Gci(s)=(I+Gmi(s))Gc(s)
(6)
即
Gmi(s)=(Gci(s)-Gc(s))Gc-1(s)
(7)
式中:i=1,2,3,5,6;Gc(s)為標稱控制對象數學模型;Gci(s)為其他特征點數學模型;Gmi(s)為非結構型輸出端不確定型模型;I為單位矩陣。
對標準控制對象Gc(s)選取加權函數WT(s)時,首先,根據WT(s)的最大奇異值與模型參數變化引起的等效模型誤差的最大奇異值的關系,初步設計魯棒加權函數WT(s),即計算選定的特征點處Gmi(s)的奇異值,并保證在有效頻段內Gmi(s)的最大奇異值大于WT(s)的最大奇異值。然后,在高頻段,為了抑制高頻干擾的影響,WT(s)的高頻增益應盡量高,并結合實際情況,選取低階次的WT(s)。
設計的魯棒加權函數為
(8)
在Matlab/Simulink中繪制非結構型輸出端不確定型模型Gmi(s)的奇異值與WT(s)的奇異值的關系,如圖 7所示。
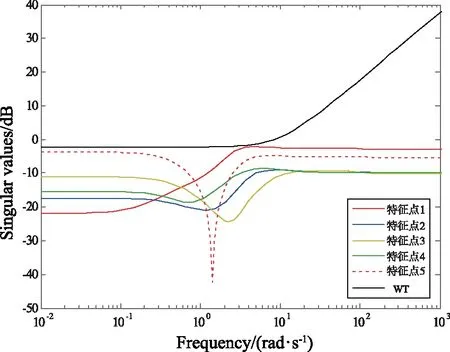
圖7 Gmi(s)與WT(s)的奇異值關系圖Fig.7 Singular value relation diagram of Gmi(s)and WT(s)
由圖7可知,設計的WT(s)滿足非結構型輸出端不確定型模型的設計要求。此外,繪制WT-1(s)和T(s)的奇異值特性曲線,如圖8所示。
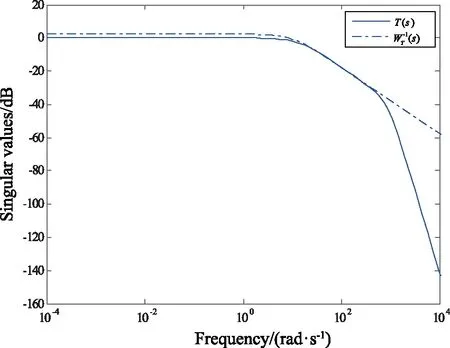
圖8 WT-1(s)和T(s)的奇異值特性曲線Fig.8 Singular values characteristic curvesof WT-1(s) and T(s)
由圖8可知,補靈敏度函數T(s)的最大奇異值在全頻域內小于WT-1(s)的幅值,滿足設計要求,并且靈敏度函數WT-1(s)的最大奇異值在全頻域內小于T(s)的最大奇異值,證明選取的加權函數在保證系統魯棒性的情況下可使系統的性能最優化。
3) 選取控制器輸出加權函數WR(s)
為了使設計的控制器具備工程意義,防止控制器的輸出過大,需引入控制器輸出加權函數WR(s)以限制控制量的大小。此外,引入WR(s)還應保證系統具有足夠的帶寬。通常,WR(s)選為一個合適的常數形式。
本文中,控制器輸出加權函數取值為
WR(s)=0.000 1
(9)
選定加權函數后,以標稱控制對象為縱向控制器設計對象,通過Matlab的魯棒控制工具箱的augtf及hinfsyn函數設計H∞混合靈敏度魯棒控制器[8]。根據混合靈敏度H∞次優控制理論,設計的H∞混合靈敏度魯棒控制器為
(10)
3 魯棒控制器性能仿真驗證
為了進一步驗證設計的H∞混合靈敏度魯棒控制器的性能指標,采用某型臨近空間飛行器的線性化模型進行性能仿真驗證。
利用Matlab軟件,仿真驗證在H∞混合靈敏度魯棒控制器的控制下某型臨近空間飛行器在6個選定特征點的時域頻域響應特性。
1) 時域響應特性驗證
各特征點的單位階躍響應如圖9所示。在H∞混合靈敏度魯棒控制器的控制下,系統在選定特征點處的時域響應特性良好,超調量較小,上升時間較短,響應較快。
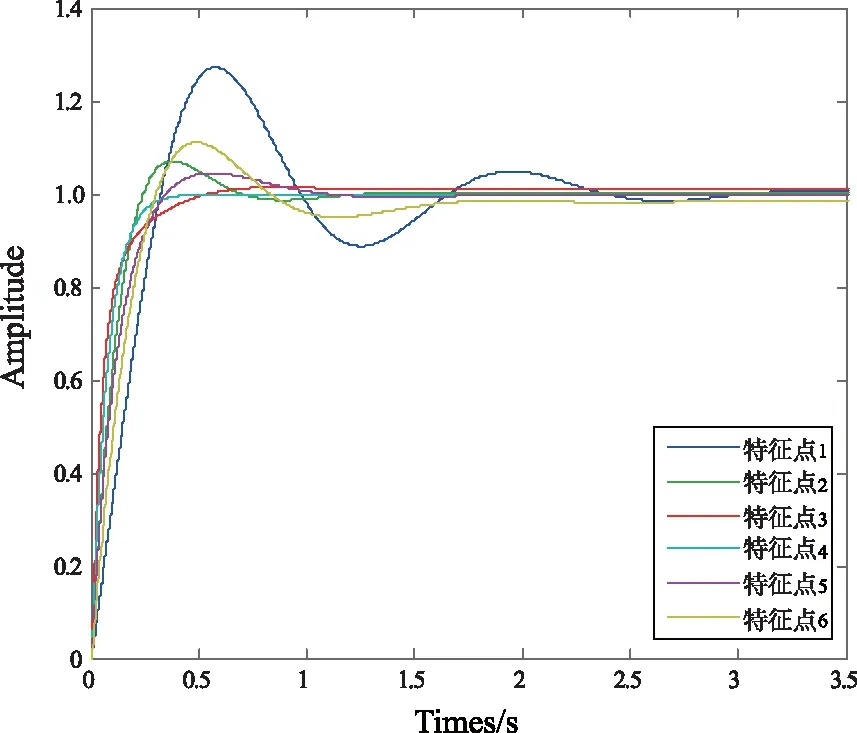
圖9 各特征點的單位階躍響應Fig.9 Unit step response of each characteristic point
2) 頻域響應特性驗證
各特征點的頻域響應如圖10~15所示。
(1) 特征點1(Ma=0.5,α=3°)
由圖10可知,幅值裕度γ=43.6 dB(頻率F=471 rad·s-1),相角裕度h=42.2°(F=5.11 rad·s-1)。
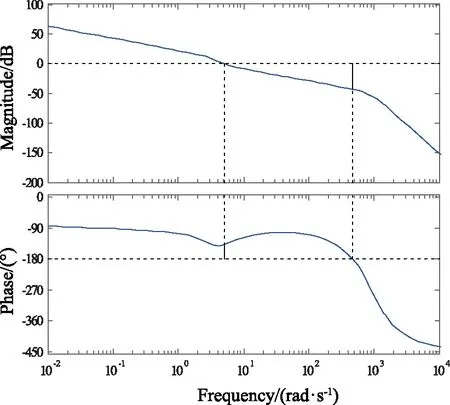
圖10 特征點1頻域響應曲線Fig.10 Frequency domain response curve of characteristic point 1
(2) 特征點2(Ma=0.8,α=0°)
由圖11可知,γ=35.8 dB(F=471 rad·s-1),h=73.8°(F=9.29 rad·s-1)。
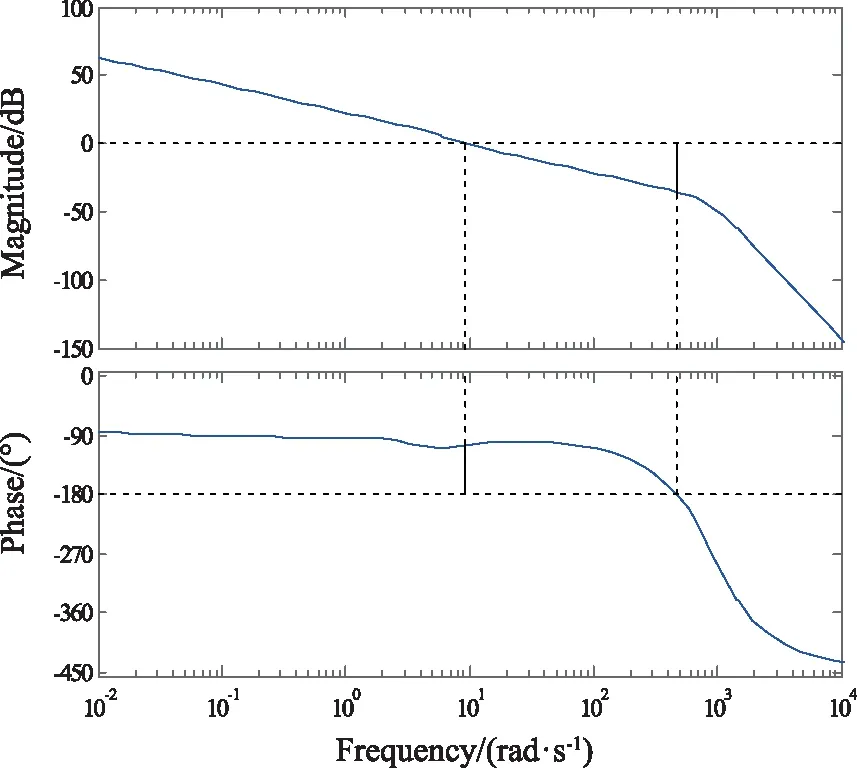
圖11 特征點2頻域響應曲線Fig.11 Frequency domain response curve of characteristic point 2
(3) 特征點3(Ma=1.2,α=0°)
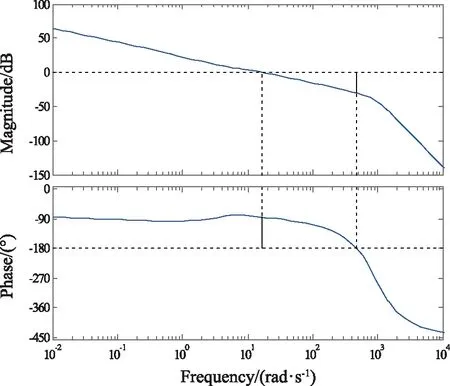
圖12 特征點3頻域響應曲線Fig.12 Frequency domain response curve of characteristic point 3
由圖12可知,γ=30.2 dB(F=471 rad·s-1),h=94.8°(F=16.6 rad·s-1)。
(4) 特征點4(Ma=1.5,α=0°)

圖13 特征點4頻域響應曲線Fig.13 Frequency domain response curve of characteristic point 4
由圖13可知,γ=32.5 dB(F=471 rad·s-1),h=87.6°(F=12.9 rad·s-1)。
(5)特征點5(Ma=2,α=3°)
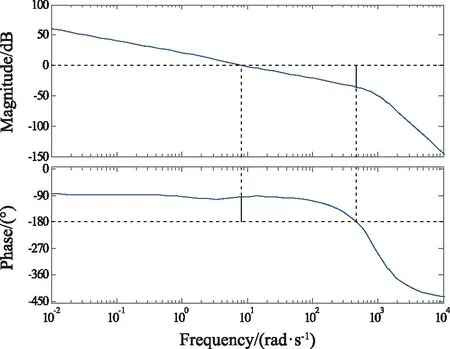
圖14 特征點5頻域響應曲線圖Fig.14 Frequency domain response curve of characteristic point 5
由圖14可知,γ=35.8 dB(F=471 rad·s-1),h=85.1°(F=8.15 rad·s-1)。
(6) 特征點6(Ma=4,α=3°)
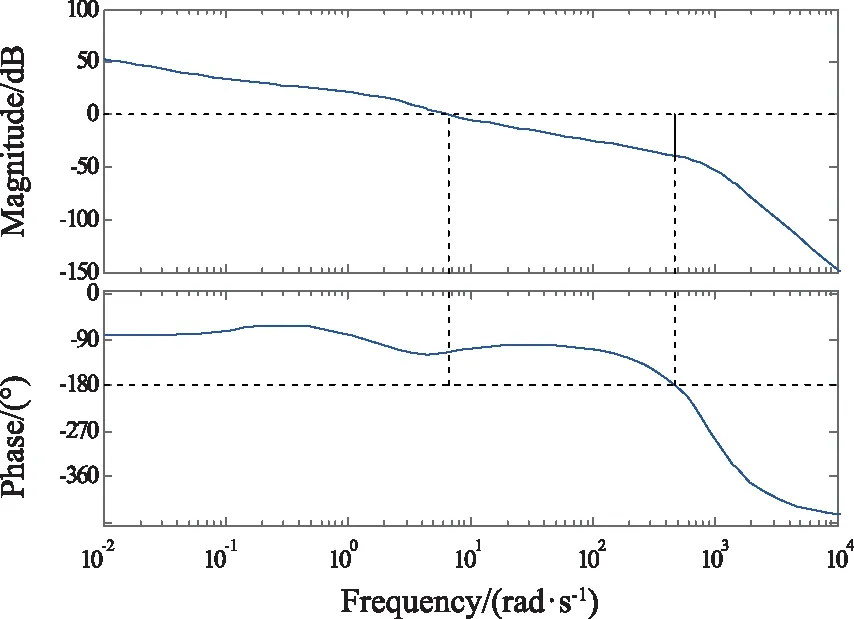
圖15 特征點6頻域響應曲線圖Fig.15 Frequency domain response curve of characteristic point 6
由圖15可知,γ=39.2 dB(F=471 rad·s-1),h=65.6°(F=6.56 rad·s-1)。
由圖 10至圖 15可知,在H∞混合靈敏度魯棒控制器的控制下,系統在6個選定的特征點處的頻域特性響應良好。幅值裕度大于30 dB,相角裕度基本大于60°,最大可達94.8°,具備較強的魯棒性。
綜上,在所設計的H∞混合靈敏度魯棒控制器的控制下,某型臨近空間飛行器可快速地響應指令信號,并且系統具備較強的魯棒性,系統的時域頻域特性滿足工程指標。
4 結束語
本文首先介紹了應用H∞混合靈敏度魯棒控制的意義及其控制思想;然后,通過選取合適的標稱控制對象和設計合理的加權函數,設計了飛行器縱向H∞混合靈敏度魯棒控制器;最后,仿真驗證了飛行器的時域頻域響應特性。結果表明,設計的控制器可使被控對象具備良好的時域頻域特性,具有很好的工程參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
