螺旋槳-冰接觸工況下載荷試驗研究
2019-08-21 04:05:16郭春雨駱婉珍王戀舟
船舶力學 2019年8期
關鍵詞:模型
郭春雨,徐 佩,駱婉珍,王戀舟
(哈爾濱工程大學 船舶工程學院,哈爾濱150001)
0 引 言
隨著全球氣候的逐漸變暖,北極航道的開通成為可能,未來國際航運的重心必然向北極地區轉移。北海航線(NSR)的發展對于引發人們對北冰洋的興趣起到了一個積極作用。在上世紀90年代,俄羅斯、日本和幾個北歐國家組成了一個聯合項目即國際海上航線計劃(INSROP)。INSROP的任務之一就是評價作為商業航線的北海航線,它發現相比于遠東和歐洲之間南部海上航線,北極航道縮短了60%的航行距離,這意味著存在巨大的潛在經濟效益,為了追求經濟性,大量的船舶將會選擇北極航道航行。此外,北極蘊藏著豐富的石油、天然氣和煤炭等自然資源[2]。冰區船舶在低溫多冰、氣候極其惡劣的北極地區進行資源勘探、開發、運輸及科考的過程中,必將發揮越來越重要的作用。當船舶在破冰、碎冰航道以及浮冰區航行時,經常會發生部分碎冰或浮冰受到船首撞擊以及下洗水流的作用而滑向船底或處于自由面以下一定深度滑行至螺旋槳前流場中,由于吸入流的作用,高速旋轉的螺旋槳與冰發生切削作用使螺旋槳槳葉發生嚴重變形和損壞。同時,當破冰船尾部破冰時,大量的冰塊會由船舶尾部進入螺旋槳的吸入流中,這樣螺旋槳受到冰塊的沖擊和切削作用使得槳葉受損,直接影響到船舶的推進效率,甚至引起嚴重的噪聲、振動,航速和經濟技術指標下降等。因此,進行螺旋槳-冰切削作用的探討對冰區船舶推進器的設計以及強度方面的研究具有十分重要的工程意義和應用價值[3]。
國外在螺旋槳-冰切削作用的研究中已經積累了豐富的經驗,Enkvist(1970)、Edwards(1976)、Jones(1982)、Bulat(1985)和Sasajima(1985)等人[4-8]將螺旋槳模型安裝在車床上,進行螺旋槳與模型冰在空氣中的切削試驗,定性地分析和總結了螺旋槳-冰的切削過程。Laskow(1986)等人[9]在M/V Robert LeMeur號進行了實尺度試驗,對螺旋槳的冰阻塞載荷和接觸載荷進行了對比分析。Keinonen(1990)等人[10]在IMD的冰水池中研究了螺旋槳上的冰載荷,并與Robert等人的實尺度試驗數據進行了對比分析。Newbury(1993)等人[11]驗證了螺旋槳-冰相互作用過程中的水動力非接觸載荷的存在。Veitch(1995)[12]建立了槳-冰接觸載荷模型,并對螺旋槳-冰的接觸力和運動響應進行了預報。Morin(1996)等人[13]用激光傳感器測量了螺旋槳上不同位置處的冰載荷。Soininen等人[14]簡化了螺旋槳的形狀,提出了螺旋槳-冰的接觸模型,并根據此模型進行了一系列的冰槳接觸試驗。Mintchev(1999)等人[15]在愛默生空泡水筒中進行了低空泡數下螺旋槳與冰的銑削試驗。Mintchev(2001)[16]在空泡水筒中用R級螺旋槳進行了冰槳切削工況下的模型試驗。Atlar(2002)等人[17]在愛默生空泡水筒進行了一系列的螺旋槳-冰銑削試驗,驗證了空化現象對吊艙推進器的水動力性能產生影響。Mooresc(2002)等人[18]在冰水池中對大傾斜螺旋槳進行了試驗,測量了螺旋槳的推力和扭矩隨螺旋槳進速系數的變化,同時觀察到螺旋槳槳葉遭到破壞的現象。Akinturk和Wang(2003-2007)等人[19-21]在加拿大海洋技術研究所的冰水池中進行了吊艙推進器和冰的切削試驗,主要測量了螺旋槳-冰相互作用過程中螺旋槳的形狀和運轉條件(進速系數、槳葉的攻角和模型冰的切割深度)的改變過程中螺旋槳的載荷,并運用數值計算方法進行了分析。Sampson(2006-2013)等人[22-25]對螺旋槳-冰切削過程中的空泡問題進行了研究,得出了螺旋槳-冰切削過程中空泡的產生對螺旋槳的水動力性能以及強度帶來了很大的影響。
目前,國內在螺旋槳-冰非接觸和接觸方面的試驗研究非常少,螺旋槳-冰切削方面的試驗研究更是沒有。針對國內螺旋槳-冰切削方面試驗空白的情況,我們在哈爾濱工程大學拖曳水池試驗室搭建了螺旋槳-冰切削試驗的試驗平臺,進行了非凍結模型冰與螺旋槳的切削試驗,并分析了螺旋槳-冰切削過程中載荷的組成。
1 試驗設備及試驗模型
1.1 測量裝置
螺旋槳-冰切削試驗的主要目的是分析螺旋槳在空氣和水中與模型冰切削時螺旋槳受到的載荷。國外研究人員對螺旋槳-冰非接觸載荷和接觸載荷的研究主要在空泡水筒中進行,而本文進行的螺旋槳-冰接觸載荷的試驗開創性地在拖曳水池中開展。在拖曳水池中進行螺旋槳-冰的切削試驗主要有以下優點:(1)可以分別進行螺旋槳與冰在空氣中和在水中的切削試驗,便于分析螺旋槳在不同介質中受到的不同載荷;(2)在螺旋槳與模型冰的切削試驗中,每進行一次切削試驗都需要重新更換模型冰,在拖曳水池中開展切削試驗的優勢是便于拆卸和安裝模型冰,可大大節省試驗時間;(3)在螺旋槳與模型冰的切削試驗過程中會產生大量的模型冰碎屑,由于模型冰不溶于水,在拖曳水池中可以很方便地處理碎屑,減少模型冰對水池試驗用水的污染。如果在循環水槽或者空泡水筒中進行切削試驗勢必會浪費大量的時間并造成水體污染。
螺旋槳-冰的切削試驗在哈爾濱工程大學拖曳水池中進行,拖曳水池全長108 m,寬度7 m,水深3.5 m;拖車最大航速為6.5 m/s,穩速范圍0.1~6.5 m/s,穩速精度0.1%,最大平均加速度:a+>0.09 g。由于在螺旋槳-冰的切削過程中,螺旋槳受到的接觸載荷比螺旋槳-冰阻塞試驗時受到的非接觸載荷大得多,所以在測量過程中應選用量程更大的試驗設備,本次試驗過程中選擇的測量系統主要有R25-1螺旋槳動力儀和DHDAS信號測試分析系統軟件。R25-1螺旋槳動力儀具有穩定性好、測量精度高和摩擦阻力小等特點,其最大推力250 N,最大扭矩和轉速分別為10 N·m和3 500 r/min。試驗過程中能把試驗測量結果輸出到信號測試分析儀中進行分析處理,在試驗之前需要進行推力和扭矩的靜態校核。DHDAS信號測試分析系統軟件具有低通濾波、信號分析、頻譜分析、抗混濾波、傳感器標定以及超低頻濾波等功能,能夠對其測量的振動波和其他波進行過濾,測量范圍為±20 mv~±20 v。
1.2 模型冰推送裝置
試驗過程中為了模擬真實冰的運動狀態設計了模型冰推送裝置,該推送裝置在模型冰運動過程中需要經受極大的抽吸力,同時能夠提供可控制的推進速度以及精確的移動距離。推送裝置主要包括KK線性模組、AC伺服電機、控制系統、模型冰固定裝置以及固模架等。試驗過程中為了實現螺旋槳-模型冰的切削,需要實現螺旋槳與模型冰之間的相對運動。本次試驗通過KK線性模組的運動來實現模型冰的運動,KK線性模組選用的型號為KK8610C-940A1-M2-F0,絲桿導程10 mm,滑塊最大移動距離為550 mm,移動速度可調,其移動速度和位移的精度分別為±0.01 mm/s和±0.01 mm。在電機的選擇過程中,首先借助CFD軟件計算單塊模型冰(200 mm×280 mm×80 mm)在水中運動時受到的阻力以及考慮絲桿滑塊的突然減速和加速的情況,預估了電機需要的功率。同時為了滿足模型冰的不同推進速度以及低速運行,最終選擇了輸出功率400 W,額定扭矩1.27 N·m,額定轉速3 000 r/min的AC伺服電機,KK線性模組、AC伺服電機以及固模架如圖1(a)所示。
其中,模型冰推送裝置中最重要的組成部分是控制系統,該控制系統可以實現模型冰不同方向、不同速度和不同位移大小的相對運動。控制系統可實現模型冰的四種運動類型即點動向前、點動向后、連動向前和連動向后。其中,點動控制是人為控制模型冰的移動距離,以便調節模型冰與螺旋槳之間的相對距離。連動控制是模型冰在線性模組的控制下自行移動設置的距離,以便模擬冰的真實運動過程。該控制系統主要由驅動器、伺服控制線和六個不同的控制開關構成,各組成成分如圖1(b)所示。在組成成分中驅動器為最重要的元件,試驗過程中為了實現螺旋槳-冰切削過程中的各種工況,需要在驅動器內部自行編寫代碼。本次試驗為了實現模型冰的三種不同的移動速度和距離,在驅動器內部自行編寫了pdl代碼,代碼的功能可以實現模型冰以5 mm/s、10 mm/s和15 mm/s的速度移動,模型冰連續運動的距離分別為1 mm、5 mm和200 mm,從而可以實現螺旋槳和模型冰在非接觸狀態和接觸狀態下的運動。
由于螺旋槳與模型冰的切削過程是一個非常復雜的過程,為了更好地控制螺旋槳-冰的切削過程和更好地測量試驗數據,需要對模型冰進行固定,保證模型冰在切削過程中不發生相對滑動。本文設計了一套模型冰固定裝置,如圖1(c)所示,模型冰的連接端采用殼式連接,可以有效地減小模型冰的滑動。同時,為了保證螺旋槳-冰切削時的穩定性以及實現螺旋槳與模型冰的不同切削深度,該連接裝置采用板狀連接,且設置不同的連接孔,可以實現螺旋槳-冰不同切削深度的試驗要求,模型冰連接裝置如圖1(d)所示。
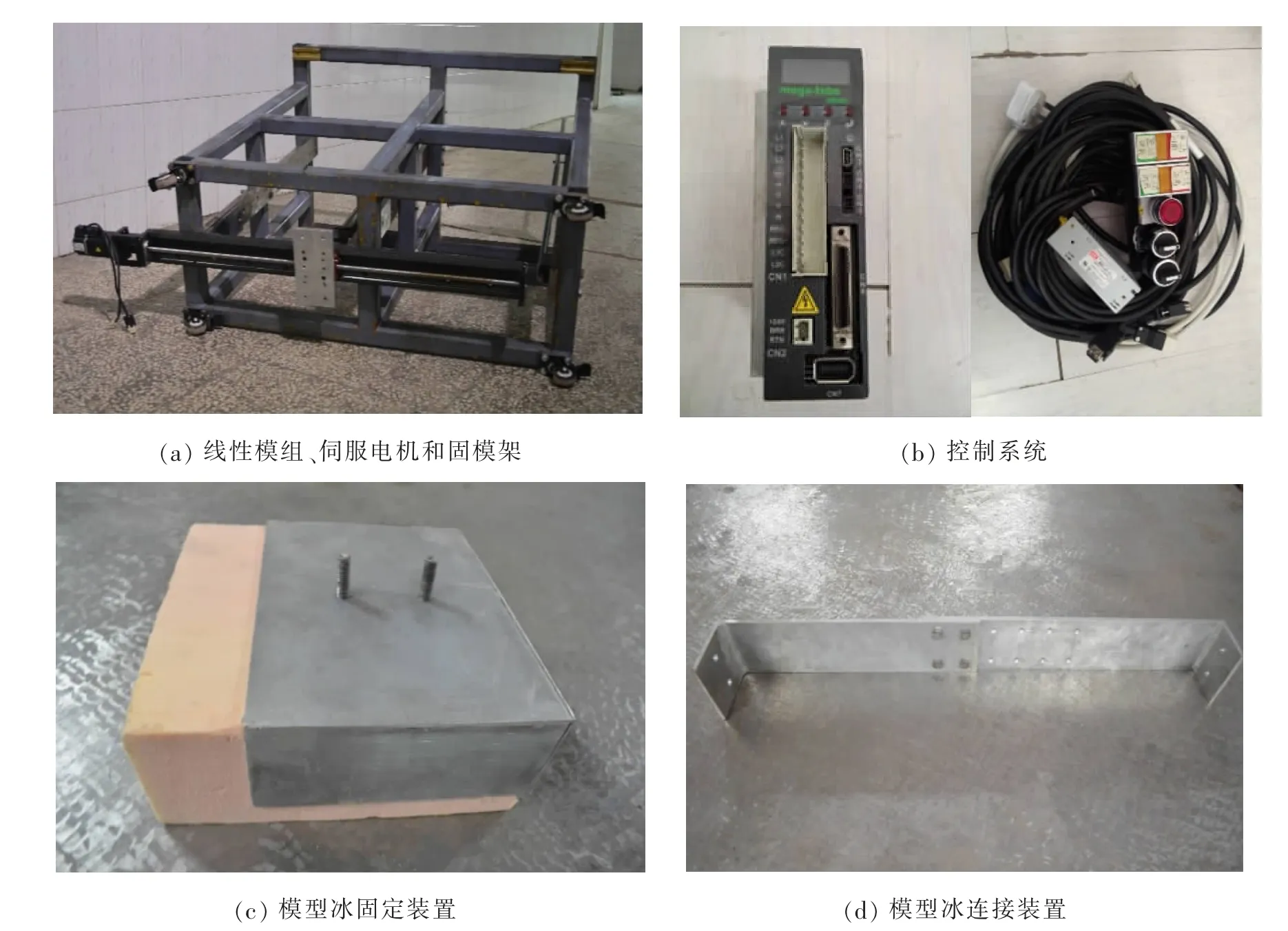
圖1 模型冰推送裝置Fig.1 Model ice feeding mechanism
1.3 螺旋槳
本次試驗所用的螺旋槳模型是根據某海事巡邏船原型槳按1:6縮尺比并進行局部修改得到的,螺旋槳的相關尺寸和參數如表1所示。

表1 螺旋槳的主要幾何參數Tab.1 Main geometrical parameters of propeller
1.4 模型冰
(1)模型冰密度測量
螺旋槳-冰的切削過程中模型冰的密度對螺旋槳與模型冰的切削轉化為螺旋槳與實際冰的切削起著非常重要的作用,因此,在試驗之前需要準確測量模型冰的密度。本次試驗中選用的模型冰為酚醛保溫板,如圖1(c)。由于模型冰不溶于水,所以采用天平量筒法即質量除體積的方法,選取10塊大小為100 mm×40 mm×12 mm的模型冰為樣本,每塊模型冰的編號分別為1~10號,分別使用電子天平和量筒測量模型冰的質量和體積。然后計算每塊模型冰樣本的密度,最后分別計算出模型冰密度的均值、方差和中位數,如表2所示。
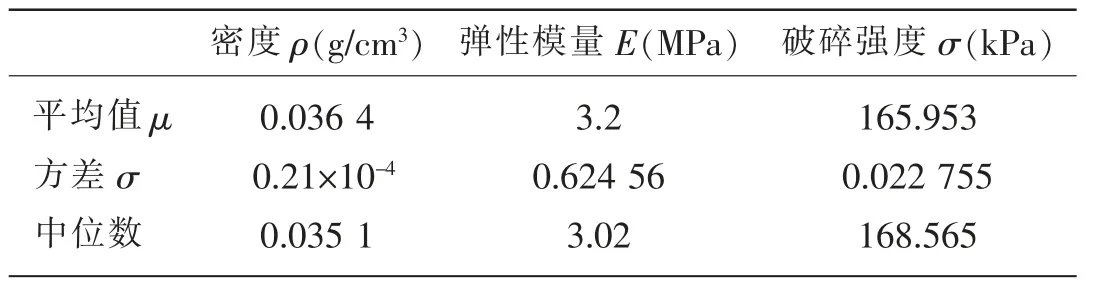
表2 測量的模型冰特性值Tab.2 Tested model ice properties
(2)模型冰特性測量
在螺旋槳-冰接觸載荷和非接觸載荷的研究過程中,由于試驗條件的限制無法直接利用海冰進行螺旋槳-冰的切削試驗,但是可以充分借助模型冰進行試驗。模型冰具有性質穩定、制作方便和價格便宜等優點,在螺旋槳和破冰船的研究過程中被廣泛使用,但是實驗后需要進行尺度換算。螺旋槳-冰切削試驗中僅僅把σ看成變量進行換算,σ為模型冰的單軸壓縮強度或者破碎強度,因此,在試驗之前需要測量模型冰的破碎強度。本文中的模型冰單軸壓縮強度試驗在哈爾濱工程大學力學測試中心進行,使用的試驗儀器是:INSTRON 5500電子萬能試驗機,試驗過程中嚴格按國標GB/T 6344-2008/ISO 1798:2008(輕質泡沫聚合材料拉伸強度和斷裂伸長率的測定)要求,制作了10塊大小為100 mm×100 mm×13 mm的模型冰,模型冰的壓縮試驗如圖2所示,(a)表示壓縮試驗前模型冰的厚度,(b)表示壓縮試驗后模型冰的厚度,試驗后測得的模型冰的應力-應變關系圖,如圖3所示。同時根據國標中壓縮強度和壓縮彈性模量的換算公式,計算出模型冰的破碎強度和彈性模量,整理后的試驗數據如表2。
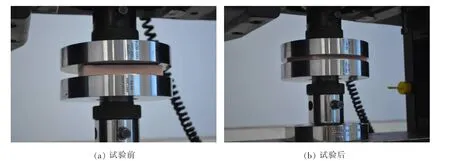
圖2 模型冰的壓縮試驗Fig.2 The compression tests on model ice
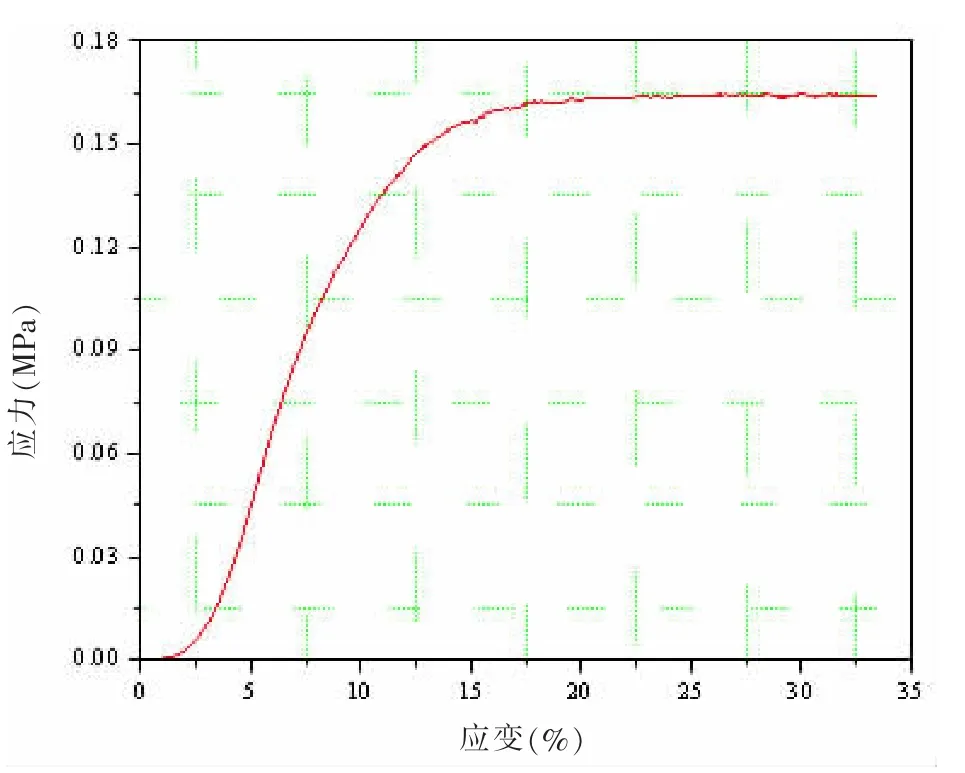
圖3 模型冰的應力-應變關系Fig.3 The stress-strain relationship curves of model ice
2 試驗基本介紹
2.1 試驗分析
本次試驗分別分析了螺旋槳不同轉速、模型冰不同移動速度、模型冰不同的切削深度以及螺旋槳不同進速系數時,螺旋槳-冰在空氣中和在水中切削工況下螺旋槳推力和扭矩的變化規律。由于篇幅的原因,本文僅僅列舉了模型冰以不同的速度移動時螺旋槳-冰在空氣中和在水中切削時的變化規律。試驗過程中選擇大小為200 mm×280 mm×80 mm的模型冰為研究對象,螺旋槳轉速為1 000 r/min,模型冰移動速度分別為5 mm/s和15 mm/s,模型冰移動距離設為200 mm(螺旋槳在模型冰前50 mm,在模型冰內運動150 mm),模型冰切割深度為25 mm,螺旋槳進速系數分別為:J=0(在空氣中切削)和J=0.4(在水中切削時,拖車航速為V=1 m/s)。
在綜合考慮水池長度、拖車速度以及雷諾數等各項因素下,螺旋槳轉速設為n=1 000 r/min,試驗水溫為15℃,螺旋槳的雷諾數依據公式(1)進行計算。

式中:VA為螺旋槳進速(m/s);n為螺旋槳的轉速(r/s);D為螺旋槳的直徑(m);b0.75R為螺旋槳槳葉在0.75R處的葉切面弦長(m);ν為水的運動粘性系數(m2·s-1)。
當螺旋槳進速VA=0 m/s時,計算得到的雷諾數滿足我國上海交通大學船舶流體力學研究室規定的雷諾數Re=3×105的要求,使螺旋槳處于充分湍流的流場狀態。
2.2 模型律
把螺旋槳與模型冰切削試驗的數據轉化為實際海冰的過程中和普通冰水池試驗的轉化方法相同,以螺旋槳直徑為基礎的弗魯德數被廣泛運用到螺旋槳-冰的切削過程中,如公式(2)所示,其中f代表實尺度,m代表模型尺度,縮尺比為λ=Df/Dm,冰的性能和螺旋槳力和扭矩的物理特性都可以通過實尺度和模型尺度表示出來。實際螺旋槳與模型槳的縮尺比為λ=6,由于模型冰和實際海冰的密度不同,根據Zufelt等(1996)[26]和Vroegrijk(2011)[27]表明的把模型冰的壓縮強度和彈性模量的縮尺運算公式,求得

冰的壓縮強度和彈性模量分別為24.89 kPa和480 MPa(實際海冰:σ=100-2 500 kPa,E=500 MPa),與實際海冰特性具有差異,但是仍然可以定性地用于分析螺旋槳-冰切削試驗時螺旋槳受到的載荷類型。
3 試驗結果及分析
3.1 螺旋槳與模型冰在空氣中切削
以螺旋槳的系泊狀態即螺旋槳進速為0 m/s,螺旋槳的轉速設為1 000 r/min,模型冰移動速度為15 mm/s,模型冰切割深度為25 mm,切削長度為150 mm時的工況為例,繪制出螺旋槳-冰在空氣中切削時模型冰移動速度V,螺旋槳轉速n、螺旋槳推力T和螺旋槳扭矩Q隨時間t的變化曲線,繪制出的效果圖如圖4,得出的試驗數據如表3所示。
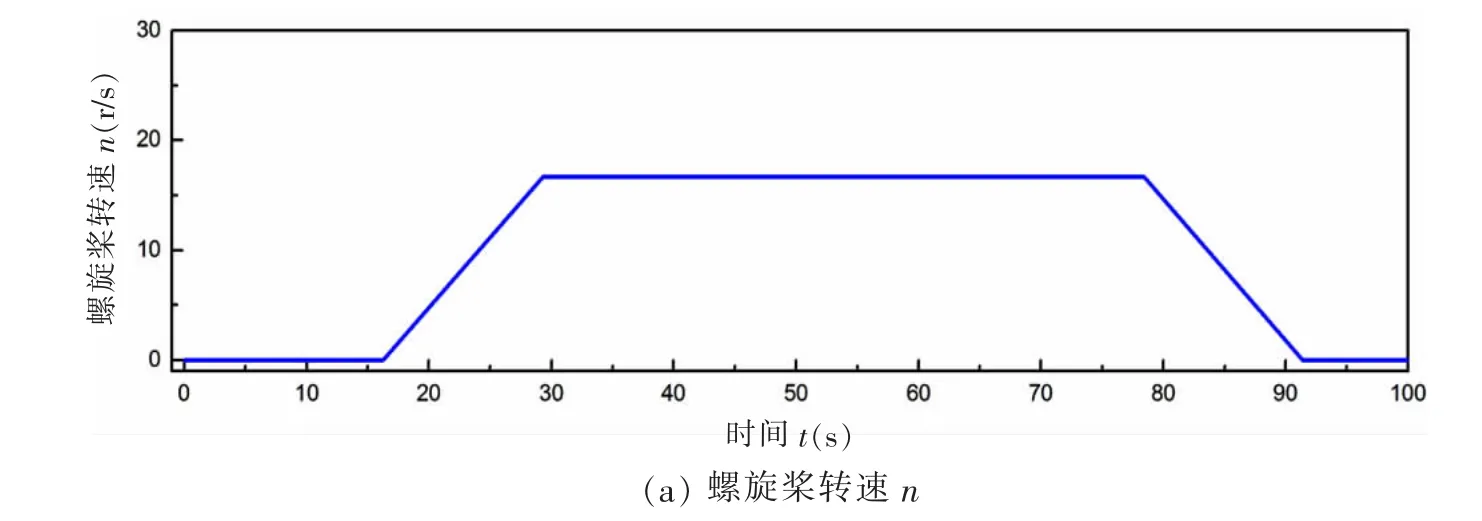
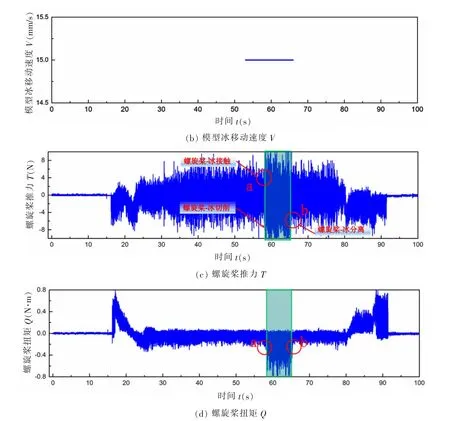
圖4 螺旋槳-冰在空氣中切削Fig.4 Propeller-ice milling in-air
圖4為螺旋槳與模型冰在空氣中切削時的試驗數據,圖中可以清晰看出模型冰移動速度、螺旋槳轉速、推力和扭矩隨時間t的變化規律。圖中詳細列舉了螺旋槳從開始旋轉到與模型冰進行切削再到螺旋槳停止旋轉的整個過程,整個階段大約花費100 s的時間。圖中展示出在t=58 s時螺旋槳導邊與模型冰開始接觸(如圖4中a點所示),螺旋槳推力曲線和扭矩曲線突然上升或下降,在經過該點后螺旋槳進入切削區域,當螺旋槳的葉梢與模型冰接觸時螺旋槳開始進入穩定的切削階段,切削時間大約為8 s,切削結束后(圖4中b點所示)螺旋槳進入穩定的旋轉階段,圖中整個綠色框圖內表示螺旋槳與模型冰的整個切削過程。圖中螺旋槳推力曲線的變化趨勢與Sampon和Atlar的實驗結果存在差異,差異的主要原因是螺旋槳的轉速過高,當螺旋槳轉速n=800 r/min時,螺旋槳推力曲線的變化趨勢和國外研究人員的實驗結果相同。螺旋槳扭矩的變化趨勢相似,證明了螺旋槳-冰切削試驗的試驗平臺搭建具有可行性。圖中展示了原始信號在整個時間域內的振動特性,特別是在切削過程中我們可以看出振動信號更加明顯。螺旋槳-冰在空氣中切削時,我們通常認為螺旋槳受到直接的冰接觸載荷和接觸區域碎冰擠壓產生的擠壓載荷,這兩種載荷的大小和螺旋槳的轉速、冰的移動速度以及冰的切割深度有很大關系。為了進一步研究螺旋槳-冰在空氣中切削時的物理過程,我們分別列舉了模型冰不同移動速度時螺旋槳-冰的切削工況,試驗過程中不同的切削狀態如圖5所示(V代表模型冰移動速度,H代表螺旋槳-冰的切削深度)。
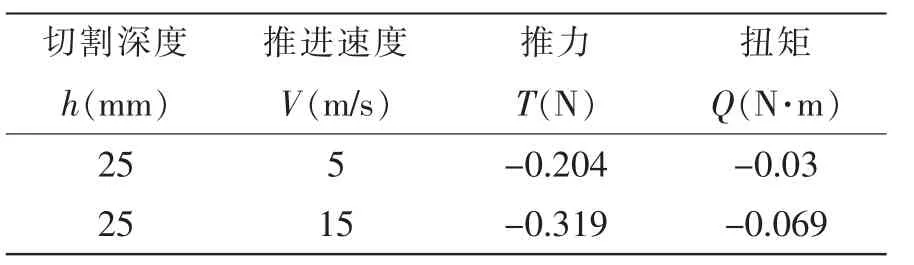
表3 螺旋槳推力和扭矩(在空氣中切削)Tab.3 The thrust and torque of propeller(in-air milling)
圖5分別展示了模型冰以5 mm/s和15 mm/s運動時螺旋槳-冰的切削過程。圖中1處紅色方框可以看出,不同的推進速度導致螺旋槳切割后的模型冰的破碎形狀不同,推進速度為5 mm/s時,破碎的模型冰呈現出碎屑狀,且破碎程度較大。推進速度為15 mm/s時,螺旋槳切割后的模型冰呈現出片狀,且長度較長。其次,從圖中2處的紅色方框內可以看出,模型冰推進速度不同,破碎后的冰被擠壓出的速度不同,甚至在3位置處時可以看出推進速度為15 mm/s時模型冰碎屑被擠壓出較遠的區域。破碎后的模型冰從切削區域被擠出時不同的擠出速度表明螺旋槳受到的擠載荷不同。同時,結合表3的數據(負號僅代表方向)表明,模型冰移動的速度越快,螺旋槳推力和扭矩越大。由此可以得出,模型冰移動速度越快螺旋槳受到的擠壓載荷越大。其中,螺旋槳推力增加的原因是產生擠載荷,而螺旋槳扭矩的增加則歸因于機械的冰接觸載荷。
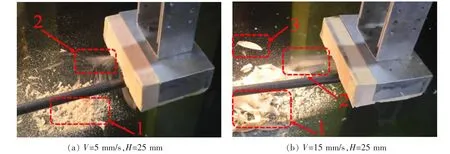
圖5 螺旋槳-冰在空氣中切削Fig.5 Propeller-ice milling test in air
3.2 螺旋槳與模型冰在水中切削
螺旋槳-冰在水中切削時螺旋槳和模型冰的浸沒深度為1.5倍的螺旋槳直徑,螺旋槳航速為1 m/s,其他設置與螺旋槳-冰在空氣中切削時的設置完全相同。螺旋槳-冰在水中切削時,螺旋槳轉速、模型冰移動速度、螺旋槳推力和扭矩隨時間t的變化曲線如圖6所示。
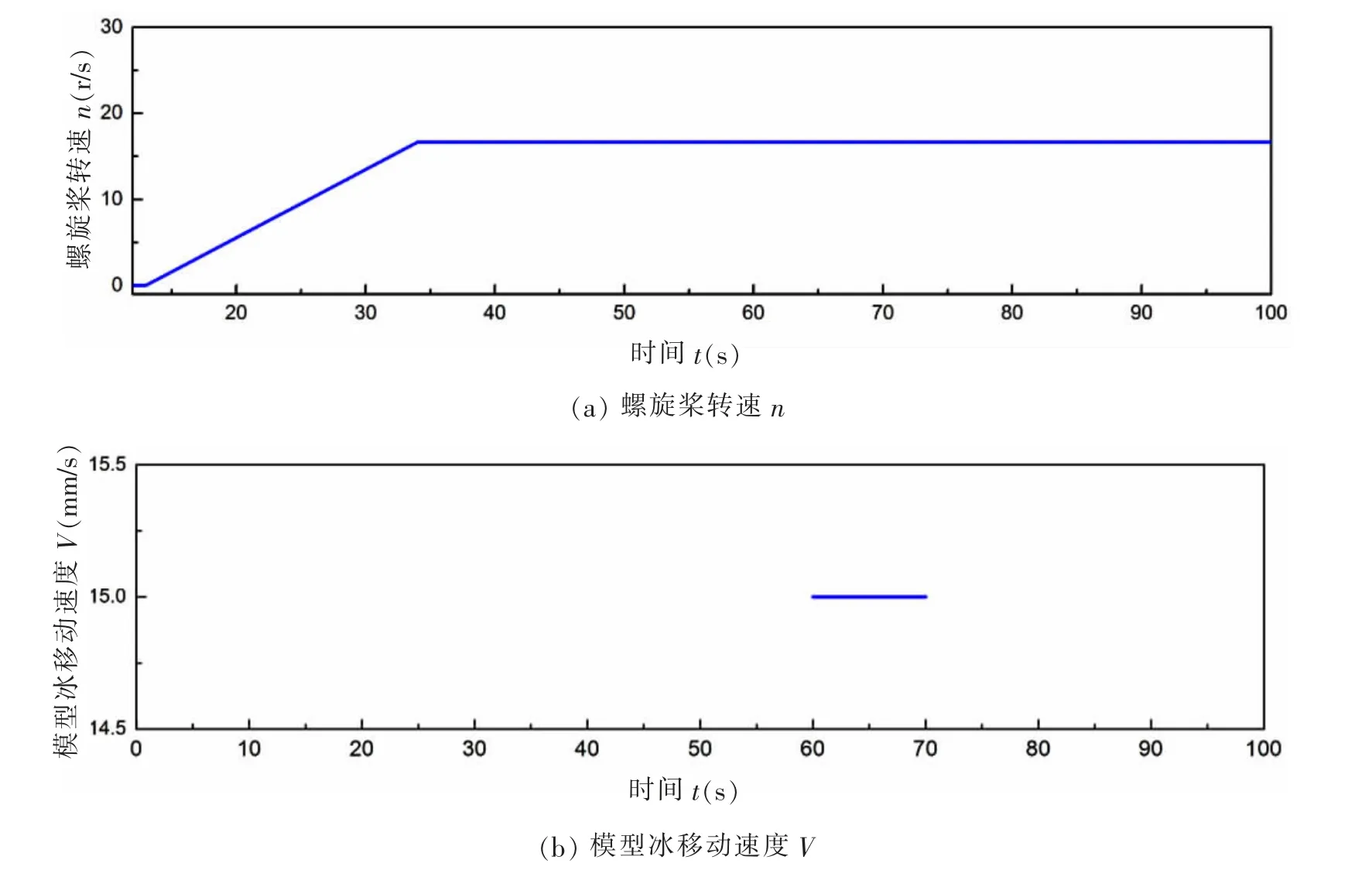
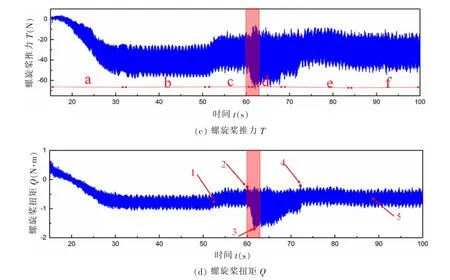
圖6 螺旋槳-冰在水中切削(V=1 m/s)Fig.6 Propeller-ice milling test in water(V=1 m/s)
螺旋槳-冰在水中切削時主要經歷三個階段:阻塞階段、鄰近階段和切削階段,在每個階段螺旋槳受到載荷的變化趨勢基本不同。下面我們分別以螺旋槳推力和扭矩隨時間t的變化曲線為例進行分析,根據試驗過程螺旋槳推力曲線的變化趨勢將螺旋槳-冰的切削過程分為6個階段,每個階段的變化趨勢如圖6(c)所示。在圖中a階段代表螺旋槳的轉速由0旋轉到1 000 r/min以及拖車的加速階段。b階段為拖車航速進入穩速階段即航行速度V=1 m/s,螺旋槳轉速為n=1 000 r/min,該階段為螺旋槳的阻塞階段,在阻塞范圍內螺旋槳推力和扭矩值與螺旋槳敞水試驗值(T=41 N,Q=0.6 N·m)相比顯著增加,增加的主要原因是模型冰對螺旋槳的阻塞影響,螺旋槳在旋轉過程中受到的載荷主要包括螺旋槳敞水載荷和模型冰對螺旋槳阻塞產生的載荷。其次,隨著時間的增加,模型冰開始以V=15 mm/s的速度逐步靠近螺旋槳,如圖6中c階段,隨著螺旋槳-冰之間的距離減小,螺旋槳受到的推力和扭矩值逐漸減少,減小的主要原因與模型冰的尺寸、螺旋槳的直徑以及拖車航速有關,由于試驗過程中選擇的模型冰尺寸為200 mm×280 mm×80 mm,螺旋槳直徑為D=150 mm,模型冰的寬度約為螺旋槳直徑的1.9倍。當拖車航速為1 m/s,模型冰以15 mm/s相對運動時,模型冰在螺旋槳盤面前產生的大部分湍流沿著模型冰兩側以及螺旋槳區域外側向后流動,使螺旋槳槳前來流相對均勻,軸向來流速度增加,導致局部進速系數增加,使螺旋槳推力和扭矩減小。而拖車航速為V=1 m/s,模型冰相對靜止時,模型冰產生的湍流更多地進入到螺旋槳槳前,使軸向來流速度減小,局部進速系數減小,從而使b階段螺旋槳受到的推力和扭矩大于c階段螺旋槳受到的推力和扭矩。該過程與拖車航速為V=0 m/s,模型冰以15 mm/s相對運動時螺旋槳與冰切削時的變化趨勢不同。在該階段內螺旋槳受到載荷主要有敞水載荷和模型冰尾流對螺旋槳阻塞產生的載荷。
阻塞階段完成后螺旋槳與模型冰開始進行切削,d階段紅色方框為螺旋槳與模型冰從接觸到切削的階段,在切削過程中螺旋槳推力和扭矩顯著增加,增加的主要原因除敞水載荷和螺旋槳受到的阻塞載荷作用外,在螺旋槳-冰切削過程中還產生的一些附加載荷作用在螺旋槳槳葉上,這些載荷主要由螺旋槳-冰接觸區域的碎冰擠壓產生,碎冰切削后充當粘性流體從接觸區域高速擠出到達螺旋槳葉背,導致了螺旋槳槳葉升力的增加。這種力是螺旋槳導邊和模型冰之間直接接觸作用產生的,但是該情況下螺旋槳槳葉的受力比水動力的影響要小,主要位于螺旋槳槳葉導邊接觸區域附近。在切削過程中螺旋槳將同時受到接觸載荷、擠壓載荷、水動力非接觸載荷和敞水載荷的影響。在螺旋槳-冰切削完成后螺旋槳在模型冰的凹槽內繼續旋轉,直到模型冰從接觸區內移出,該過程如圖6中e階段所示。該階段內螺旋槳推力和扭矩出現了先減小后增加的趨勢,螺旋槳在模型冰凹槽內逐漸退出的過程中,螺旋槳槳前軸向來流速度逐漸增加,使螺旋槳局部進速系數增加,從而使螺旋槳受到的推力和扭矩減小。當螺旋槳從模型冰凹槽內退出且模型冰逐漸遠離螺旋槳時,導致螺旋槳槳前流場更加紊亂,軸向來流速度進一步減小,螺旋槳受到的推力和扭矩有逐漸增加的趨勢。當模型冰相對靜止時,螺旋槳再次進入阻塞階段,如圖中f階段,但是該階段與b階段不同,該階段為凹槽模型冰(即切割后的模型冰)對螺旋槳的阻塞影響。從圖6(c)中可以看出,該階段螺旋槳受到的推力和扭矩小于b階段螺旋槳受到的推力和扭矩,減小的原因是更多的水流通過模型冰凹槽進入螺旋槳槳前,使其軸向來流增加,局部進速系數增加,從而使螺旋槳受到的推力和扭矩相對減小。此時,螺旋槳受到敞水載荷和凹槽模型冰對螺旋槳的阻塞載荷。
為了進一步了解螺旋槳-冰的切削過程,以圖6(d)為例分析螺旋槳與模型冰相對運動情況。圖中位置點1表明模型冰開始逐步靠近螺旋槳,隨著模型冰的移動,到達位置點2。在位置點2之前,螺旋槳受到的載荷較小,而位置點2之后,螺旋槳推力和扭矩突然增加,表明螺旋槳與模型冰開始進行切削,因此,位置點2被稱為最大鄰近點。經過位置點2后直接進入位置點3,位置點3表示螺旋槳導邊與模型冰開始進行切削。當螺旋槳葉梢與模型冰接觸時,螺旋槳開始進入穩定的切削階段,圖中紅色方框詳細展示出力的變化趨勢。切削完成后,螺旋槳從模型冰凹槽內逐漸移出,點4表明螺旋槳從模型冰凹槽內完全移出,而位置點4和位置點5之間時間段內為模型冰逐漸遠離螺旋槳。到達位置點5之后螺旋槳與凹槽模型冰無相對移動,切削后的模型冰對螺旋槳產生穩定的阻塞影響。在整個螺旋槳-冰的切削過程中,螺旋槳推力曲線和扭矩曲線的變化趨勢和Sampon,Atlar和Wang等人描述的試驗現象略有差異,存在這種差異的主要原因與選擇的模型冰材料、模型冰切割深度、模型冰推進速度以及螺旋槳轉速有關。同時,也說明了螺旋槳-冰切削過程的復雜性。綜上所述,可以得出螺旋槳-冰相互作用的過程中模型冰在不同位置時螺旋槳受到的載荷不同,這些載荷主要包括:接觸載荷、從接觸區域擠出的受損冰的擠壓載荷、水動力非接觸載荷和平均敞水水動力載荷。這些載荷在螺旋槳槳葉和冰切削的過程中可能同時發生在槳葉的不同位置。
4 結 論
本文針對國內螺旋槳-冰切削試驗方面的空白,在哈爾濱工程大學拖曳水池內搭建螺旋槳-冰切削試驗的測量平臺,詳細敘述了測量平臺的試驗設施和模型冰特性的測量,同時對螺旋槳-冰在空氣中和水中的切削過程進行了詳細的描述。得出的主要結論如下:
(1)通過與其他學者的試驗結果對比,證明了本文在拖曳水池中搭建的試驗平臺能夠較好地控制螺旋槳-冰的切削過程,能夠穩定地測量螺旋槳-冰切削過程中螺旋槳受到的推力和扭矩,驗證了在拖曳水池中進行螺旋槳-冰切削試驗的可行性和可靠性。
(2)本文詳細分析了螺旋槳-冰在空氣中和水中切削時螺旋槳受到的載荷,得出模型冰移動的速度越快螺旋槳受到的擠壓載荷越大。同時,掌握了螺旋槳-冰切削過程的一些基本載荷,加深了對螺旋槳-冰切削過程的理解。其次,本次試驗觀察到的試驗現象以及得到的螺旋槳推力和扭矩變化曲線可為數值模擬方法提供參考。
(3)本次試驗僅僅是對螺旋槳-冰切削過程中的一次嘗試,測量精度上可能還有很多不足之處,有待進一步提高。對于未來的工作將會研究更多因素(如:模型冰不同角度運動、螺旋槳不同位置處碰撞,不同形狀的模型冰、螺旋槳不同轉速、拖車不同航速以及吊艙推進器操舵時的切削等)條件下螺旋槳-冰的切削試驗。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19