一種基于電磁吸附的爬壁機器人的設計與研究
2020-10-27 05:45:57張加潤李占賢
科學與財富 2020年24期
關鍵詞:結構設計
張加潤 李占賢
摘 要:本文以罐體、船舶類等大型金屬設備表面的除銹、清洗、打磨為背景,研制出了一種基于電磁吸附的爬壁機器人,完成了傳動機構、腿部結構和吸附裝置的具體設計。在明確相關構件尺寸參數的前提下,利用SolidWorks軟件繪制了機器人的三維模型。介紹了其在爬行過程中腿部機構的動作原理。
關鍵詞:爬壁機器人;結構設計;運動學分析
1. 引言
眾所周知,罐體、船舶類等金屬設備的表面經常存在著除銹、清洗、打磨、焊接等相關作業需求[1-3],這些工作在以往都是由人工來完成,經常采用搭載吊籃或腰系繩索等的工作方式,工作強度高、效率低,并具有一定的危險性。因此,一種能夠代替人工進行相關作業的爬壁機器人的研制需求變得極為迫切[4-6]。
2. 爬壁機器人的整體設計方案
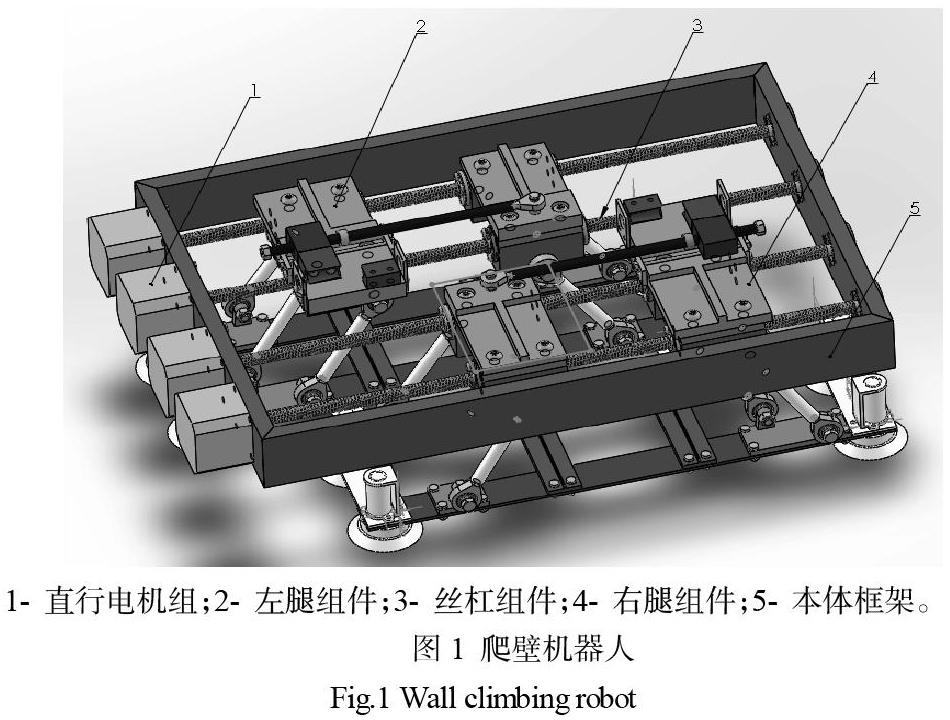
如圖1所示,為爬壁機器人的基本模型,主要由左腿組件、右腿組件、絲杠組件、直行電機組和本體框架構成。四個電機等間距并排固定在機器人框架的一端,絲杠的一端通過聯軸器與電機連接,另一端與機器人框架的基座剛性連接,左側兩滑塊與左側兩絲杠配合移動,右側兩滑塊與右側兩絲杠配合移動。
電機、轉動絲杠和滑塊組成機器人的驅動裝置。在圖1中,四個電機從上到下依次表示為OF、OB、IF、IB。其中左腿所連電機OF、OB驅動左腿上兩滑塊的移動,右腿所連電機IF、IB驅動右腿上兩滑塊的移動。前、后兩滑塊的一組對角孔設置內螺紋,另一組設為通孔。
腿部組件是爬壁機器人的動作執行裝置。為了保證機器人爬行過程結構緊湊,腿部組件采用類似等腰梯形的機構,對稱排列在機器人本體框架的左右兩側。通過電機以不同轉速帶動絲杠的轉動,可以調節前、后滑塊之間的距離,從而實現機器人的抬腿與落腿動作。
2.1 傳動機構的設計
傳動機構決定著機器人的運動精度,為了確保機器人作業的效率和質量。傳動機構的設計尤為重要。
其中,該機器人的傳動機構主要由四個電機組、聯軸器、本體框架、絲杠和滑塊組成。四組傳動機構并排放置,在本體框架的左、右兩側分別安裝前、后兩個滑塊,該傳動機構可以將電機的轉動轉化成滑塊的直線運動。其中,當包括滑塊在內的整個右腿機構在吸附力的作用下與壁面保持相對靜止時,電機的轉動便實現機器人本體框架相對滑塊(也即壁面)的移動,即機器人完成了沿壁面的爬行。
2.2 腿部結構的設計
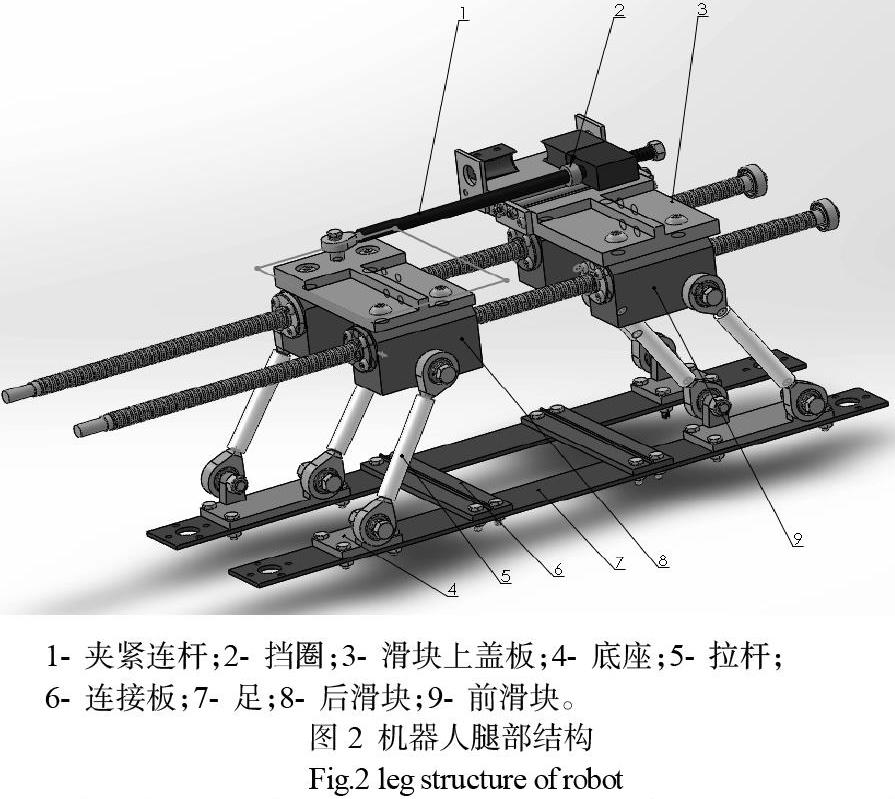
根據機器人作業環境的不同,其行走機構的設計也不盡相同。本文提出了一種并聯足式爬壁機構,其設計如圖2所示。
腿部組件主要由拉緊連桿、擋圈、連接板、推拉閥、吸盤、電磁鐵、足部、前、后滑塊、滑塊上蓋板等組成。每條腿上裝有六個拉桿,雙拉桿與單拉桿交替排列并成對角分布。其中,與單連桿相連的滑塊孔內設有內螺紋,與絲杠形成螺旋副,起傳動作用,與雙連桿相連的滑塊孔內不設螺紋,不與絲杠發生作用,形成移動副。此外,前、后滑塊通過夾緊連桿連接。
通過控制兩條絲杠的轉速不同可以改變兩滑塊之間的距離,從而使機器人實現抬腿或落腿動作。當兩滑塊之間距離增大時,足部逐漸下落并直至與壁面接觸;當兩滑塊距離減小時,足部抬起并向前移動。因此,通過分別控制四個直行電機的轉速,配合電磁鐵及時的通、斷電,可以使機器人左、右兩足依次交替吸附在壁面上,從而實現可機器人的勻速行走。
2.3 吸附裝置的設計
吸附裝置主要由墊板、推拉閥和吸盤等組成。其中,每個足部由兩個平行細長板組成,二者通過一對并排的連接板相連。在細長板的每端,分別安裝一個推拉閥,在推拉閥的正下方安裝吸盤,在吸盤內部裝有電磁鐵。拉閥裝置具有體積小、性能可靠,動作靈敏的特點,可以頻繁的完成周期性啟停工作,適合機器人腿部機構的運動特點。同時,該裝置不容易發生損壞,壽命長,可以長期使用。
3. 結論
根據爬壁機器人作業的環境和內容,結合機構設計原則,提出了一種運行平穩、負載較強、靈巧度好的并聯足式爬壁機構,在對關鍵技術進行選擇的基礎上,完成了機器人整體方案的設計。該機器人的研制解決了人工作業勞動強度大、效率低、危險性高的問題,對室內、外各種大型金屬設備表面的除銹、噴漆、清洗等相關作業具有很大的實用價值。
參考文獻:
[1]朱光輝. 新型爬壁機器人的研制[D]. 重慶:重慶大學, 2016.
[2]唐東林, 袁波, 胡琳, 等. 儲罐探傷爬壁機器人全遍歷路徑規劃方法[J]. 工程設計學報, 2018, 25(03):253-261.
[3]王志剛, 張軻, 羅志鋒, 等. 爬壁機器人焊縫跟蹤過程中的焊縫檢測與識別研究[J]. 熱加工工藝, 2018, 47(01):210-213+219.
[4]胡紹杰, 彭如恕, 何凱, 等. 履帶式爬壁機器人磁吸附單元優化設計與實驗研究[J]. 機械與電子, 2018, 36(01):69-74.
[5]郝月嬌. 風電塔筒清潔機器人的結構設計與分析[D]. 蘭州:蘭州理工大學, 2019.
[6]陳彥臻, 胡以懷. 船體清洗機器人的開發現狀與展望[J]. 船舶工程, 2017, 39(10):62-69.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
