基于虛擬樣機技術(shù)的管柱輸送機械手動態(tài)特性研究
2019-08-14 02:38:58趙亮亮王耀華白丙建韓亞洲殷克平劉延明
石油礦場機械 2019年4期
趙亮亮,王耀華,白丙建,韓亞洲,殷克平,劉延明
(1.寶雞石油機械有限責(zé)任公司,陜西 寶雞 721002;2.國家油氣鉆井裝備工程技術(shù)研究中心,陜西 寶雞 721002)
近年來,鉆井作業(yè)市場競爭日益激烈,各鉆探公司希望在加快進尺的同時保障作業(yè)安全、降低工人勞動強度,通過對鉆井裝備的自動化控制來實現(xiàn)鉆井作業(yè)提速、增效、降本的目的。雖然國內(nèi)具有一定自動化水平的5 000、7 000 m鉆機已在應(yīng)用,但是針對淺井鉆機的自動化研究尚未開展,尤其是隨著煤層氣鉆機、液壓鉆機、斜直井鉆機等特種鉆機技術(shù)的不斷發(fā)展,這些采用單根作業(yè)的小型鉆機也要求具有較高的自動化水平,以期達到縮短建井周期,降低開采成本的目的[1-4]。根據(jù)淺井鉆機中煤層氣鉆機、液壓鉆機、斜直井鉆機等采用單根作業(yè)鉆機的技術(shù)發(fā)展需要和油田的實際生產(chǎn)需求,急需開發(fā)具有自主知識產(chǎn)權(quán)的淺井單根自動化鉆機。筆者設(shè)計開發(fā)了適用于淺井單根自動化鉆機作業(yè)的管柱輸送機械手,該設(shè)備采用機、電、液相結(jié)合的技術(shù),實現(xiàn)管柱從地面水平狀態(tài)到鉆臺面井口中心豎直狀態(tài)的自動化輸送。
針對管柱輸送機械手自身結(jié)構(gòu)特點以及功能動作的復(fù)雜性問題,基于虛擬樣機技術(shù),以ADAMS軟件為平臺,對各個部件施加相應(yīng)的約束和載荷,建立管柱輸送機械手整機虛擬樣機模型。對管柱輸送機械手整機系統(tǒng)動力學(xué)建模與分析、動力學(xué)參數(shù)優(yōu)化等方面進行了系統(tǒng)研究;對樣機的多剛體模型和剛?cè)狁詈夏P头謩e進行了仿真分析。實現(xiàn)了管柱輸送機械手全運行過程中的動態(tài)特性仿真,為設(shè)備的優(yōu)化設(shè)計提供了依據(jù)[5-8]。
1 設(shè)備簡介
1.1 結(jié)構(gòu)組成
管柱輸送機械手主要由安裝座、主臂、副臂、夾持鉗、扶正鉗、拉桿、主臂液缸、伸縮液缸、副臂液缸等組成,如圖1所示。

圖1 管柱輸送機械手結(jié)構(gòu)示意
1.2 工作原理
管柱輸送機械手作業(yè)時,通過貓道排管架將水平放置的管柱滾入輸送機械手,再由機械手鉗爪夾持管柱,直接遞送到井口中心并交給頂驅(qū)進行鉆井作業(yè),如圖2所示。

圖2 管柱輸送機械手工作過程示意
具體工作過程如下:
1) 張開夾持鉗。
2) 操作動力貓道,讓單根管柱滾到機械手托桿上。
3) 關(guān)閉夾持鉗、扶正鉗,緩慢舉升主臂。
4) 舉升主臂,在管柱即將進入井架時停止。
5) 舉升副臂,在管柱下端即將進入井架時停止。
6) 打開吊卡,使吊卡處于扣合管柱等待狀態(tài)。
7) 繼續(xù)舉升主臂、微調(diào)副臂,使被輸送管柱基本與井口中心重合,扣合吊卡。
8) 張開夾持鉗、扶正鉗。
9) 下放主臂、副臂,回貓道至初始位置。
2 多剛體動態(tài)特性研究
為了深入研究管柱輸送機械手的動態(tài)特性,首先建立了機械手多剛體動力學(xué)模型,對其主要參數(shù)和關(guān)鍵執(zhí)行機構(gòu)運動過程進行研究。
2.1 動力學(xué)模型參數(shù)確定
在進行仿真之前,需要在ADAMS中對管柱輸送機械手相關(guān)機構(gòu)建立約束、施加載荷及驅(qū)動,參數(shù)如表1所示。

表1 管柱輸送機械手運動相關(guān)參數(shù)
對于輸送機械手旋轉(zhuǎn)關(guān)節(jié)處采用旋轉(zhuǎn)副、圓柱副、球鉸來代替,同時需要在此處添加靜摩擦因數(shù)0.5,動摩擦因數(shù)0.3。
2.2 風(fēng)載建立
針對管柱輸送機械手的結(jié)構(gòu)特點及作業(yè)環(huán)境,在仿真時需要考慮風(fēng)載對設(shè)備運行過程的影響。
作用于機械手上的風(fēng)速為20 m/s(即風(fēng)力為2 kN),也就是說機械手受到的最大風(fēng)力是2 kN,但是有一定的周期變換。同時,由于不清楚風(fēng)的方向,無法確切的對其進行描述,所以使用三維力加載方式,如圖3所示。
為達到最佳加載力的效果,要保證力合成后最大也依然為2 kN。由于風(fēng)力是有一定的周期的,因此這種合成力的最好的方式就是用一個正弦曲線與一個余弦曲線在錯開1/4個周期后進行合成,即sint+cost,這樣無論哪個力作用,或者同時作用,均可以保證力的狀態(tài),如圖4所示。
2.3 管柱輸送機械手多剛體動力學(xué)模型
完成約束、載荷施加后的管柱輸送機械手動力學(xué)模型如圖5所示。
2.4 多剛體動態(tài)特性研究
輸送機械手在工作過程中,主要依靠主液缸和伸縮液缸的伸出和縮回來完成管柱從地面到鉆臺或從鉆臺到地面的輸送,在此過程中輸送機械手具有2種運行工況,分別是連續(xù)運動輸送和斷續(xù)運動輸送(即主液缸中間過程停滯等待游吊下放)。基于多剛體動力學(xué)模型,對主液缸和伸縮液缸的運動速度與伸縮距離在2種工況進行研究。
2.4.1 輸送機械手連續(xù)運動輸送
通過STEP函數(shù)對主液缸施加運動速度,根據(jù)實際作業(yè)工況,通過多次優(yōu)化得出主液缸的速度為STEP(time,0,0,1.5,-44.8)+STEP(time,23,0,27,44.8),如圖6所示。根據(jù)輸入速度得到主油缸的位移曲線,如圖7所示。

圖6 主液缸連續(xù)運動速度曲線

圖7 主液缸連續(xù)運動位移曲線
通過STEP函數(shù)對伸縮液缸施加運動速度,根據(jù)實際作業(yè)工況,通過多次優(yōu)化得出伸縮液缸的速度為STEP(time,15,0,17.5,-30)+STEP(time,24.5,0,27,30),如圖8所示。根據(jù)輸入速度得到伸縮油缸的位移曲線,如圖9所示。

圖8 主液缸連續(xù)運動時伸縮液缸運動速度曲線

圖9 主液缸連續(xù)運動時伸縮液缸運動位移曲線
2.4.2 輸送機械手斷續(xù)運動輸送
通過STEP函數(shù)對主液缸施加運動速度,根據(jù)實際作業(yè)工況,通過多次優(yōu)化得出主液缸的速度為STEP(time,0,0,1.5,-44.8)+STEP(time,21,0,22,44.8)+STEP(time,32,0,33.5,-27.5)+STEP(time,37,0,40,27.5),如圖10所示。根據(jù)輸入速度得到主油缸的位移曲線,如圖11所示。

圖10 主液缸斷續(xù)運動速度曲線
通過STEP函數(shù)對伸縮液缸施加運動速度,根據(jù)實際作業(yè)工況,通過多次優(yōu)化得出伸縮液缸的速度為STEP(time,10,0,12.5,-30)+STEP(time,19.5,0,22,30),如圖12所示。根據(jù)輸入速度得到伸縮油缸的位移曲線,如圖13所示。

圖11 主液缸斷續(xù)運動位移曲線

圖12 主液缸斷續(xù)運動時伸縮液缸運動速度曲線

圖13 主液缸斷續(xù)運動時伸縮液缸運動位移曲線
3 剛?cè)狁詈蟿討B(tài)特性研究
通過對輸送機械手多剛體模型的動力學(xué)仿真分析,確定了2種運行方式,一種是輸送機械手連續(xù)運行將管柱送到井口,另一種是輸送機械手上升到一定高度后等待游吊下放,然后繼續(xù)運行將鉆桿送到井口。
多剛體動力學(xué)仿真視所有零部件為剛體,無變形,這種仿真結(jié)果不能反映輸送機械手在送管柱過程中,管柱在不同位置的變形和擺動量,因此,將模型中的細長構(gòu)件管柱(以鉆桿為例)和主臂進行柔性化,建立輸送機械手的剛?cè)狁詈蟿恿W(xué)模型,分析鉆桿到達井口位置后其上端的擺動量,進而判斷鉆桿上端與頂驅(qū)能否成功對接及對接效率。
3.1 管柱輸送機械手剛?cè)狁詈蟿恿W(xué)模型建立
在ANSYS中建立鉆桿和主臂的MNF文件(模態(tài)中性文件),替代原多剛體動力學(xué)模型中的鉆桿和主臂,建立管柱輸送機械手剛?cè)狁詈蟿恿W(xué)模型[9-10],如圖14所示。

圖14 管柱輸送機械手剛?cè)狁詈蟿恿W(xué)模型
3.2 剛?cè)狁詈蟿討B(tài)特性研究
3.2.1 輸送機械手連續(xù)運動輸送
輸送機械手連續(xù)運行,直接將鉆桿輸送到井口中心,鉆桿上端在井口前后方向的軌跡曲線如圖15所示。
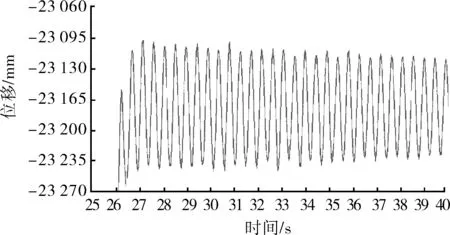
圖15 連續(xù)運行鉆桿上端在井口前后方向位移
從仿真曲線可以看出,機械手連續(xù)運行將鉆桿送到井口時,鉆桿上端擺動量為±70 mm,小于頂驅(qū)背鉗上導(dǎo)向體喇叭口的直徑280 mm,故鉆桿可由導(dǎo)向體導(dǎo)向進入背鉗與頂驅(qū)對接。
3.2.2 輸送機械手斷續(xù)運動輸送
輸送機械手先運行到一定高度,在井口附近等待游吊系統(tǒng)下放,再將鉆桿輸送到井口中心,鉆桿上端在井口前后方向的軌跡曲線如圖16所示。

圖16 斷續(xù)運行鉆桿上端在井口前后方向位移
從仿真曲線可以看出,輸送機械手斷續(xù)運行將鉆桿送到井口時,鉆桿上端擺動量為±55 mm,小于頂驅(qū)背鉗上導(dǎo)向體喇叭口的直徑280 mm,故鉆桿可由導(dǎo)向體導(dǎo)入背鉗與頂驅(qū)對接。
4 結(jié)論
1) 建立了管柱輸送機械手的多剛體動力學(xué)模型,結(jié)合現(xiàn)場實際作業(yè)工況,通過仿真分析得到連續(xù)運行和斷續(xù)運行條件下主液缸和伸縮液缸的工作曲線。
2) 通過連續(xù)運行和斷續(xù)運行2種工況仿真分析,輸送機械手輸送的鉆桿均滿足與頂驅(qū)對接的要求;在斷續(xù)運行工況下鉆桿的擺動量較小,對接效率較高。