基于設計參數(shù)的轉向特性虛擬試驗及評價
2019-08-14 10:56:08夏小均陳德兵姚波賴詩洋
汽車零部件 2019年7期
夏小均,陳德兵,姚波,賴詩洋
(1.重慶車輛檢測研究院有限公司國家客車質量監(jiān)督檢驗中心,重慶 401122;2.重慶工程職業(yè)技術學院機械工程學院,重慶 402260)
0 引言
汽車操縱穩(wěn)定性是整車開發(fā)的重要指標,決定了汽車高速行駛時的安全性,是現(xiàn)代汽車的重要性能之一。穩(wěn)態(tài)轉向特性作為表征汽車操縱穩(wěn)定性的時域響應,十分重要。穩(wěn)態(tài)轉向特性包括不足轉向、中性轉向和過多轉向,過多轉向會導致汽車出現(xiàn)失去穩(wěn)定性的情況,因此汽車應具有一定的不足轉向特性[1]。
汽車穩(wěn)態(tài)轉向特性不僅取決于汽車質心所在位置和輪胎的使用性能,也受到懸架、傳動系等結構的影響[2]。因此需通過虛擬仿真技術研究汽車的穩(wěn)態(tài)轉向特性,以節(jié)約時間和經(jīng)濟成本。在某新開發(fā)整車模型的基礎上,分析其轉向特性,提出增加橫向穩(wěn)定桿的改進方法。
1 穩(wěn)定性因數(shù)核算
為了解模型的穩(wěn)態(tài)回轉特性,首先將車輛簡化為線性二自由度模型[3]。在分析過程中忽略轉向系的影響,直接使用前輪轉角作為輸入;忽略懸架的影響,認為汽車車廂只沿z軸移動,繞y軸的俯仰角與繞x軸的側傾角為0,此外設汽車沿x軸前進速度u為0。因此汽車僅有沿y軸的側向運動與繞z軸的橫擺運動。將汽車的側向加速度設置在0.4g以下,輪胎的側偏特性在線性范圍內(nèi)[4]。最終將該車簡化為一個如圖1所示的兩輪摩托車模型。它是兩自由度汽車模型,由兩個有側向彈性的輪胎支撐于地面上,具有側向及橫擺運動。
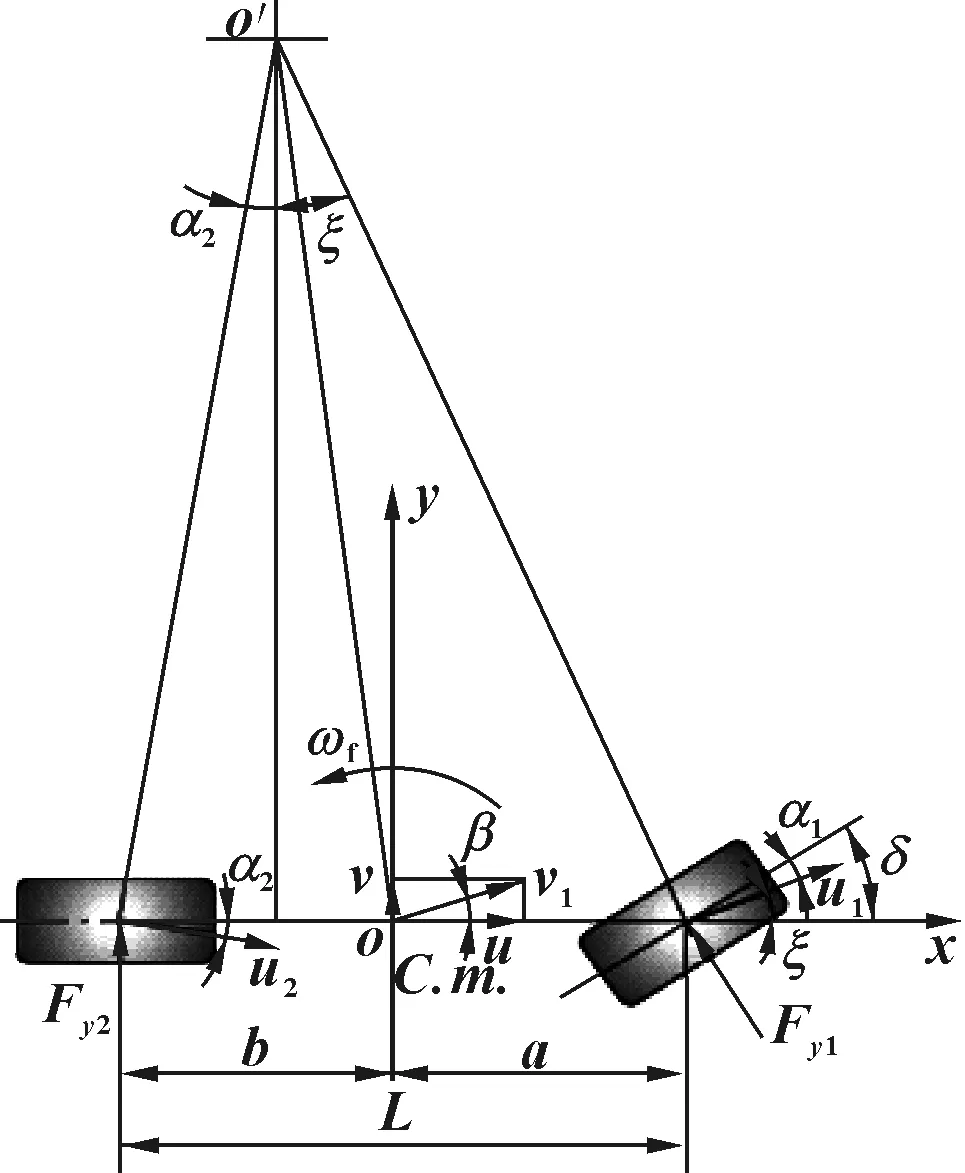
圖1 二自由度汽車模型式
其中:K是穩(wěn)定性因數(shù);m是整車質量;L是軸距;a是質心距前軸的距離;b則是質心距后軸的距離;k1、k2分別是前輪和后輪的總側偏剛度。整車設計參數(shù)如表1所示。
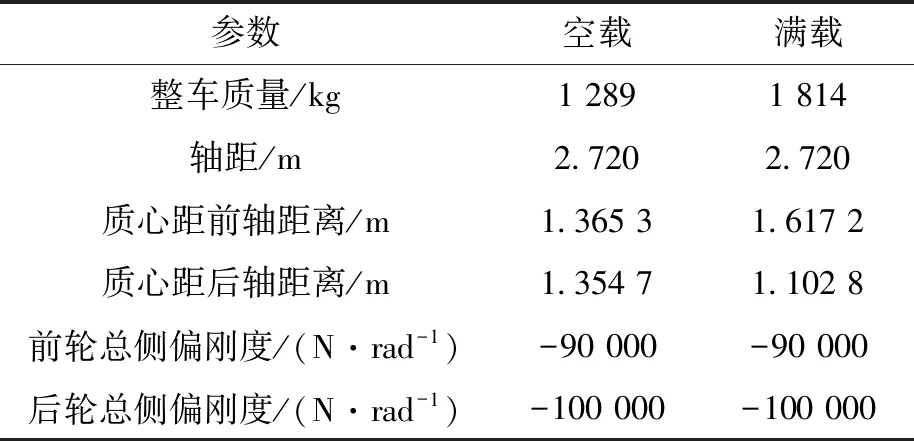
表1 整車設計參數(shù)
可以發(fā)現(xiàn),整備質量工況下穩(wěn)定性因數(shù)是0.000 243 7,即K>0,車輛特性為不足轉向。而滿載時,求得穩(wěn)定性因數(shù)是-0.000 960 81,K<0,理論上該車在滿載工況轉彎時,會出現(xiàn)輕微的過多轉向,這可能導致汽車失去穩(wěn)定性。
利用工程分析方法,車輛的穩(wěn)態(tài)轉向特性如下:空載時體現(xiàn)為不足轉向,而滿載時過多轉向。為確保良好操縱穩(wěn)定性能,汽車應具有適當?shù)牟蛔戕D向特性。
在整車設計基本定型的基礎上,在前懸架位置安裝橫向穩(wěn)定桿裝置,可在保證經(jīng)濟和時間成本的基礎上,一定程度上增加前懸架的側傾角剛度,使整車朝著增加不足轉向的趨勢運動[5]。
2 虛擬模型建立
在建立車輛仿真模型之前,首先確定整車模型的坐標。在ADAMS中采用了模型坐標系,原點位于前軸幾何中心,X軸指向與汽車車速相反的方向,Y軸指向汽車右側,Z軸指向上方,遵守右手規(guī)則。
2.1 前懸架模型
該車的前懸架為麥弗遜式獨立懸架,主要由減振器、轉向節(jié)總成(減振器下部與轉向節(jié)連接在一起)、螺旋彈簧、控制臂、轉向橫拉桿、副車架等組成。表2中是懸架設計參數(shù),圖2是前懸架的模型圖。
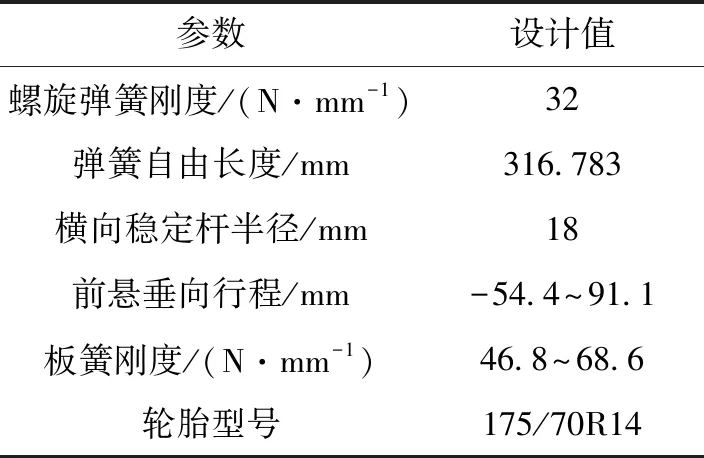
表2 懸架建模參數(shù)

圖2 前懸架模型
表3為前減振器性能測試參數(shù),由供應商提供。
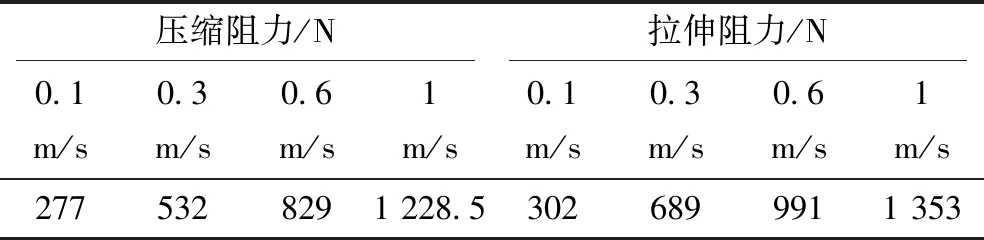
表3 前減振器阻尼特性
2.2 后懸架模型
汽車后懸架為板簧縱置式非獨立懸架。在主簧下加裝了漸變剛度鋼板彈簧作為副簧,板簧中部用兩個U形螺栓與后橋相連接;前部主片與前支架以裝配式吊耳結構鉸接,后部主片的卷耳與吊耳支架通過吊耳銷及吊耳相連接,可自由擺動,從而形成活動吊耳,吊耳支架通過焊接方式固定在車架上,在主片卷耳和支架之間壓入耐磨襯套;為防止鋼板彈簧變形過大而斷裂,在車橋上以限位塊固定。圖3為后鋼板彈簧懸架的模型。在空載狀態(tài)下主簧起作用,主簧剛度在42.5~47 N/mm之間,與設計參考值46.8 N/mm吻合較好;復合剛度在62.5~67.5 N/mm之間,與設計參考值68.6 N/mm吻合較好。表4示出了減振器阻尼特性,圖4表示后懸架仿真剛度特性曲線。
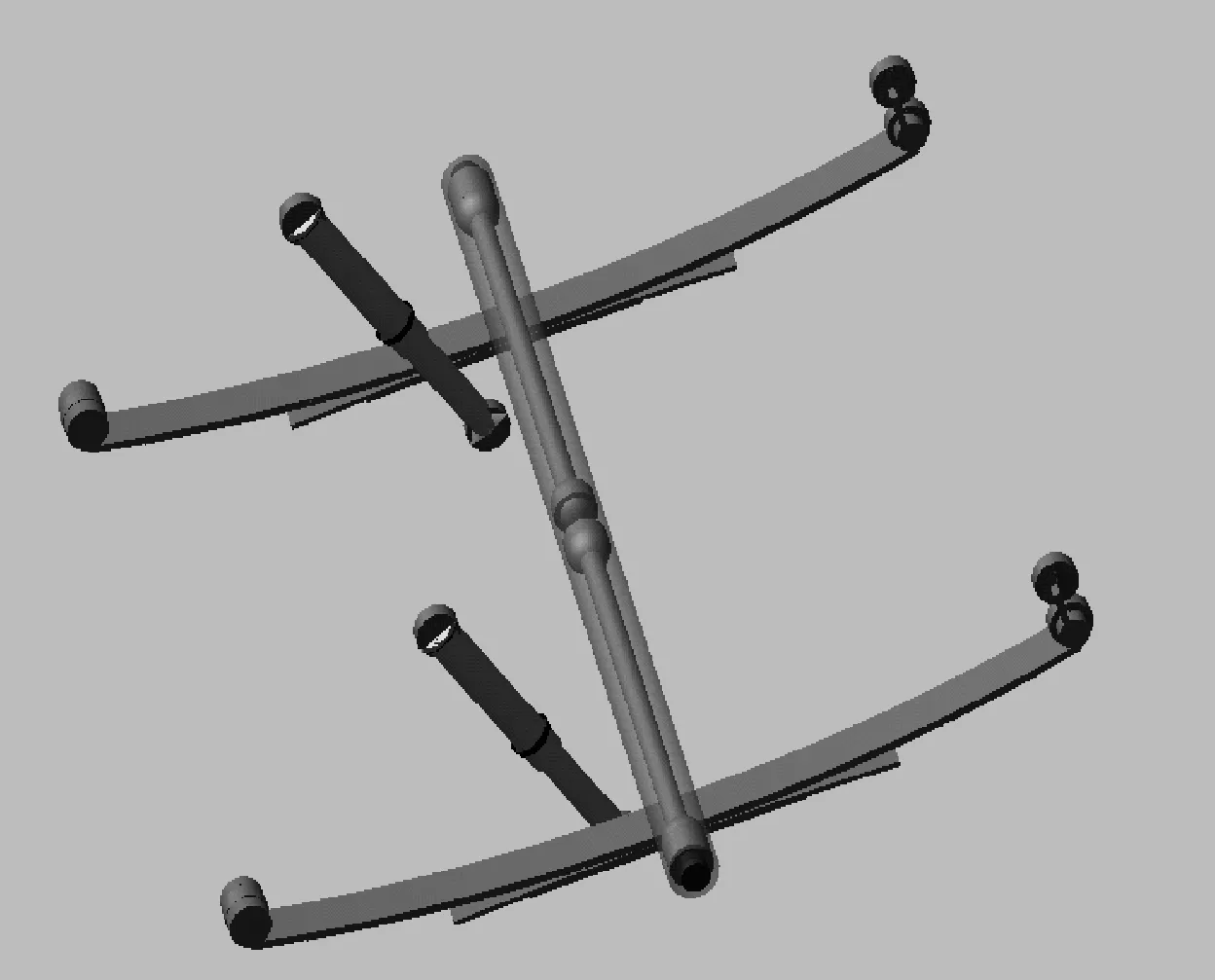
圖3 后懸架模型表4 后減振器阻尼特性
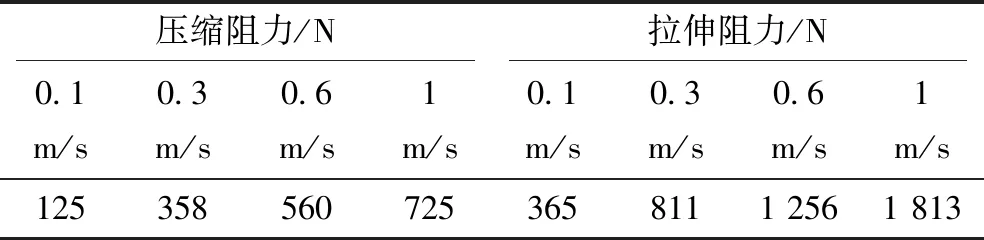
壓縮阻力/N 拉伸阻力/N 0.1 m/s0.3 m/s0.6 m/s1 m/s0.1 m/s0.3 m/s0.6 m/s1 m/s1253585607253658111 2561 813
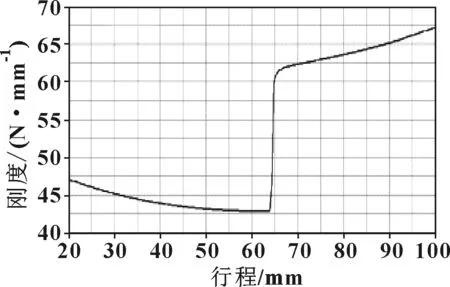
圖4 后懸架仿真剛度特性曲線
2.3 轉向系及橫向穩(wěn)定桿模型
在此車型采用的轉向系中,方向盤與轉向柱管通過旋轉副連接,而轉向柱管通過圓柱副與轉向柱連接,兩個運動副間傳動比為1。兩個萬向節(jié)連接轉向輸入軸與輸出軸;采用兩個橡膠襯套使轉向齒條套連接到車身。輸出軸與齒條殼通過旋轉副連接,齒條殼和齒輪以旋轉副連接,兩個運動副定義了力從方向盤傳到轉向軸的關聯(lián)副,傳動比也為1。齒條套和齒條以移動副連接,轉向橫拉桿被推拉從而使汽車改變方向;轉向齒條通過等速副與轉向橫拉桿連接;轉向齒輪與轉向輸出軸之間為彈性襯套,起到了汽車動力轉向器分配閥中的扭桿作用。表5中為轉向系建模相關參數(shù)。

表5 轉向系相關建模參數(shù)
建立好的轉向系與橫向穩(wěn)定桿模型分別見圖5和圖6。
Title: The knowledge, skills and dispositions of a qualified mathematics teacher in community college

圖5 轉向系模型
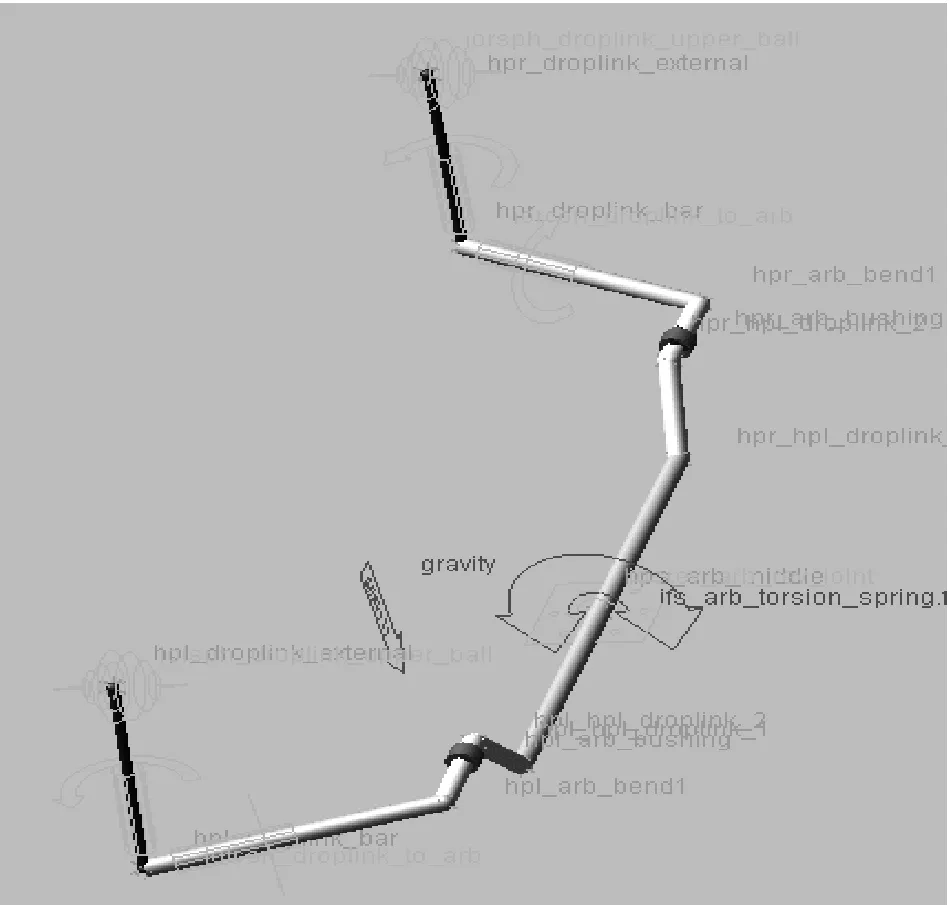
圖6 橫向穩(wěn)定桿模型
加大懸架的側傾角剛度,可有效改善汽車穩(wěn)定性,可通過添加橫向穩(wěn)定桿來實現(xiàn)這一目的。其建模方法為:將橫向穩(wěn)定桿從中部分為兩半,添加旋轉副以連接,采用扭簧表達扭轉剛度。橫向穩(wěn)定桿通過一個球副連接前后兩個懸架,立柱與橫向穩(wěn)定桿的連接借助襯套,另一端固定在車身上。由于未進行扭轉力學實驗,無法獲取實際的橫向穩(wěn)定桿扭轉剛度,故采用有限元的方法初步計算,作為設計參數(shù)。
2.4 車身、動力總成及傳動系
簧上質量包含動力及傳動系、車身、乘員和駕駛室等,對這些系統(tǒng)作簡化處理,使質量集中于車身并用一個球體來體現(xiàn)。
2.5 前、后輪胎模型
輪胎的側偏剛度對汽車操縱穩(wěn)定性影響較大,因此需要較為精確的輪胎力學模型,以確保整車模型的精度。由于未提供輪胎的特性參數(shù),故參考輪胎型號,借鑒MSC提供的pac2002輪胎模型[6],修改其部分幾何參數(shù)建立了pac2002_175_70R14輪胎模型。
2.6 整車多體動力學模型
裝配前述各子系統(tǒng),得到圖7中的車輛ADAMS模型。
圖7 整車多體動力學ADAMS模型
進行仿真分析前先調整好車身的質心位置和轉動慣量,采用SAE經(jīng)驗公式計算車身的轉動慣量。
其中:TW為輪距(m);WB為軸距(m);m是汽車質量(kg);RH為車頂離地高度(m);Hg為汽車質心高度(m);L為汽車總長;Kx、Ky、Kz為3個方向的計算系數(shù)。
計算參數(shù)如下:TW=1.43 m,WB=2.72 m,m=1 814 kg,RH=1883 m,Hg=0.669 m,L=4.35 m,Kx=7.984 6,Ky=5.290 1,Kz=2.194 2。
3 仿真試驗
3.1 定轉角穩(wěn)態(tài)回轉試驗方法
3.2 虛擬試驗結果
此處以空載狀態(tài)為例,對仿真分析過程加以說明,滿載分析流程與之相同。
采用ADAMS/Car中的驅動控制文件(.dcf)進行整車仿真分析,文件中設置兩個小工況(mini_maneuver):第一個小工況使汽車達到穩(wěn)定轉彎狀態(tài),最低穩(wěn)定車速取為5 m/s,轉彎半徑取20 m;第二個小工況中汽車方向盤固定,以0.25 m/s2縱向加速度轉向行駛,當側向加速度為該車空載狀態(tài)下所能達到的極限值5.8 m/s2時結束。
從圖8和圖9可以看出:在整個仿真過程中前進車速和側向加速度的變化曲線近似于一條直線,與實際整車試驗場中的穩(wěn)態(tài)測試狀況相符,說明整個仿真過程滿足實驗要求。
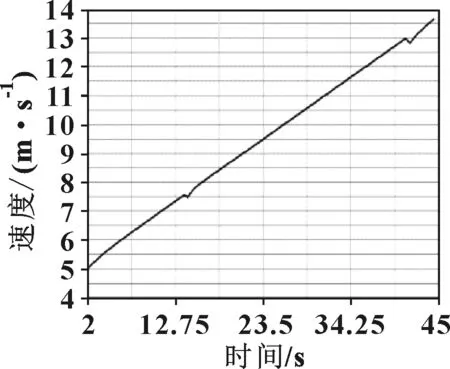
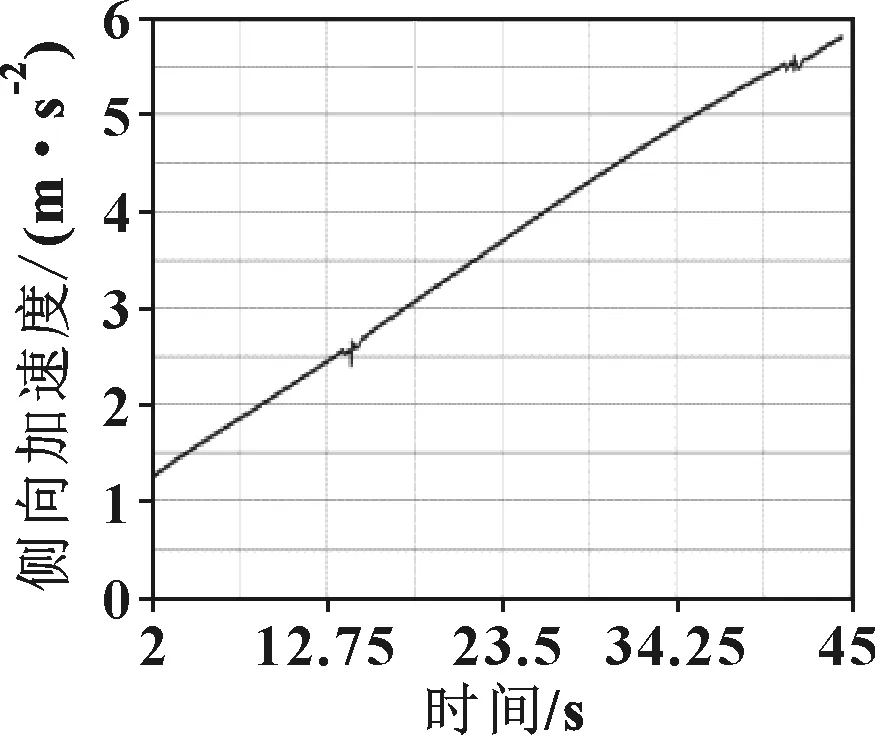
圖8 穩(wěn)態(tài)回轉試驗前進車速 圖9 穩(wěn)態(tài)回轉試驗側向加速度
以轉彎半徑比、前后軸側偏角之差以及車廂側傾角對試驗結果進行表達。圖10為轉彎半徑比與側向加速度關系曲線,圖11為空載和滿載狀態(tài)下前、后軸側偏角之差與側向加速度關系曲線,圖12為空載和滿載狀態(tài)下車廂側傾角與側向加速度關系曲線。
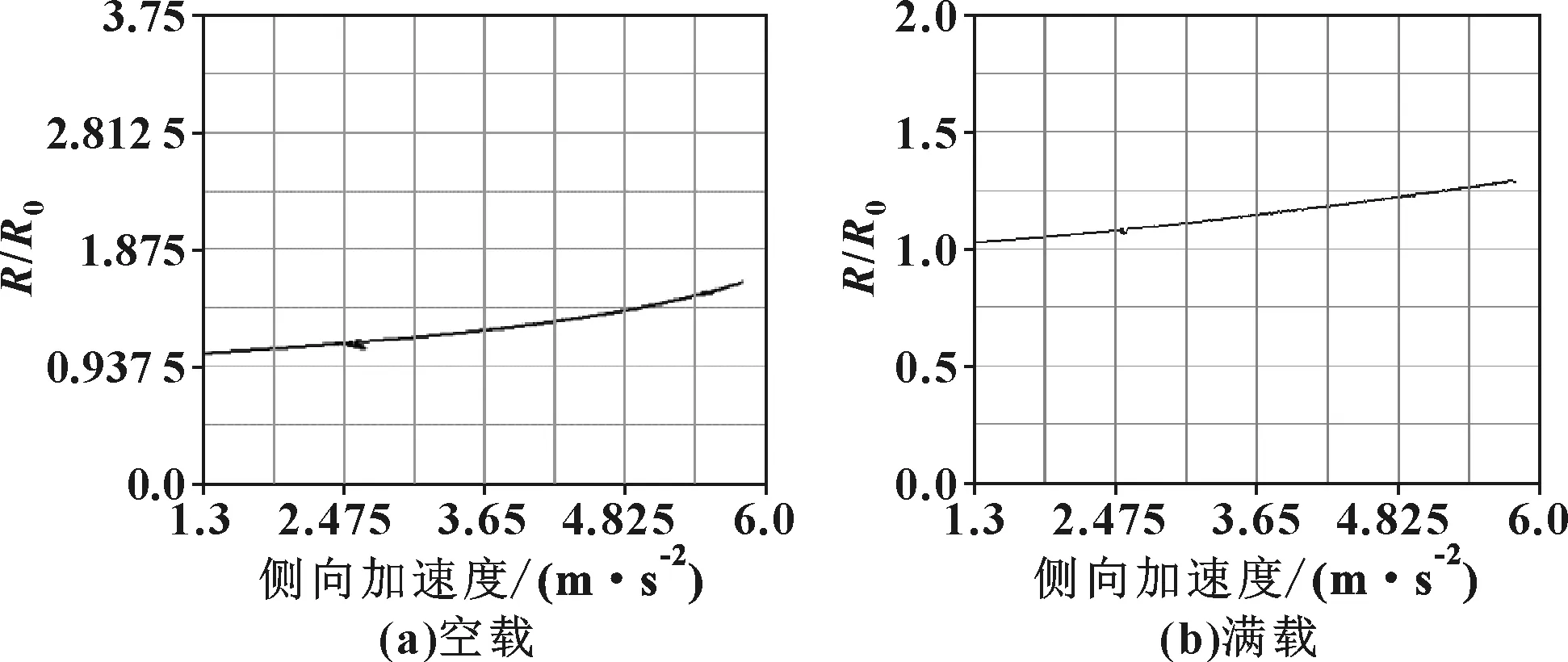
圖10 轉彎半徑比與側向加速度關系曲線
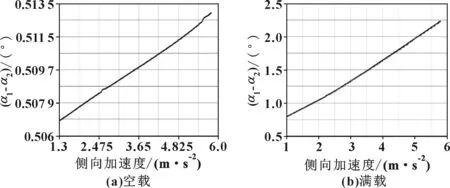
圖11 前、后軸側偏角之差與側向加速度關系曲線
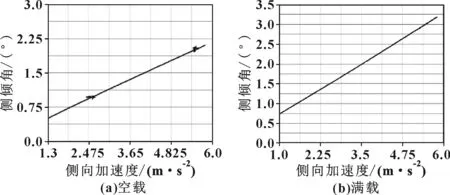
圖12 車廂側傾角與側向加速度關系曲線
3.3 穩(wěn)態(tài)回轉虛擬試驗結果評價
根據(jù)國家標準QC/T 480—1999,對中性轉向點的側向加速度值、不足轉向度和車身側傾度3項指標進行評分。前、后軸側偏角之差與側向加速度變化趨勢上,斜率為0位置的側向加速度值即為中性轉向點的側向加速度值,未出現(xiàn)中性轉向點時,用最小二乘法依據(jù)無常數(shù)的3次多項式擬合方法進行推算。不足轉向度是側向加速度等于2.0 m/s2時前、后軸側偏角之差與側向加速度的平均比值。車廂側傾度為車廂側傾角隨側向加速度變化時橫軸等于2.0 m/s2時的平均斜度。最終的虛擬試驗值及評分在表6中。
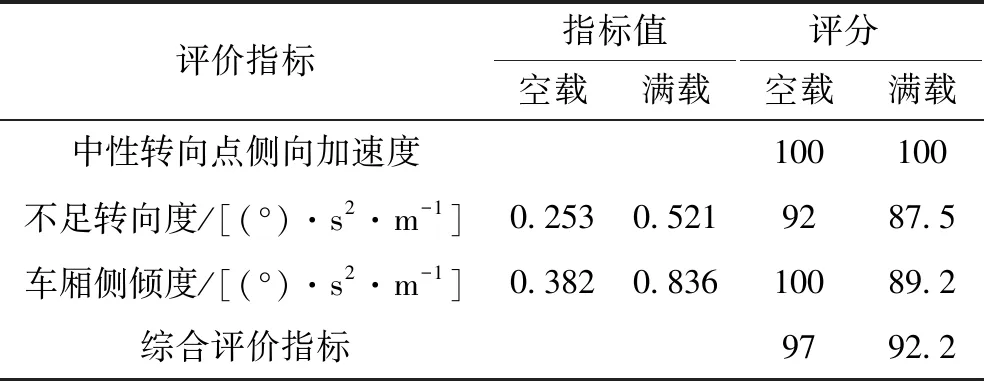
表6 仿真結果及評價
注:全側向加速度范圍內(nèi)未出現(xiàn)中性轉向點,汽車始終為不足轉向,該指標計滿分。
通過虛擬試驗可以看出,該車轉向特性為不足轉向,且綜合評價指標值較高,改進后汽車在空載和滿載情況下均具有一定的不足轉向度。因此,在原車型已經(jīng)基本定型的基礎上,通過加裝橫向穩(wěn)定桿增加不足轉向度,是一種節(jié)約經(jīng)濟和時間成本的有效方法。
4 結論
通過核算穩(wěn)定性系數(shù)得出該車在滿載狀態(tài)下具有過度轉向特性,提出增加橫向穩(wěn)定桿的改進方案。在ADAMS中建立車輛各部分模型后裝配,獲得車輛的多體動力學模型。采用模型進行虛擬定轉角穩(wěn)態(tài)回轉試驗并評價分析,發(fā)現(xiàn)穩(wěn)態(tài)回轉試驗效果較好,加裝橫向穩(wěn)定桿后有效地提高了汽車的不足轉向度。可以看出,車輛的操縱穩(wěn)定性在改進后綜合評價值更高,穩(wěn)態(tài)轉向特性表現(xiàn)優(yōu)越。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數(shù)學雜志(初中版)(2006年1期)2006-12-29 00:00:00
