基于變結(jié)構(gòu)控制的無(wú)人機(jī)編隊(duì)飛行方法
2019-08-13 01:22:06張西勇葉慧娟
兵器裝備工程學(xué)報(bào) 2019年7期
關(guān)鍵詞:設(shè)計(jì)
張西勇,葉慧娟
(1.武漢東湖學(xué)院 機(jī)電工程學(xué)院, 武漢 430033; 2.海軍工程大學(xué) 兵器工程學(xué)院, 武漢 430033)
在現(xiàn)代戰(zhàn)爭(zhēng)中,無(wú)人機(jī)(UAV)由于具備零傷亡的優(yōu)勢(shì),已經(jīng)成為執(zhí)行作戰(zhàn)任務(wù)的重要裝備。針對(duì)作戰(zhàn)任務(wù)的復(fù)雜性和多樣化,往往需要多個(gè)UAV協(xié)同執(zhí)行任務(wù),無(wú)人機(jī)編隊(duì)控制問(wèn)題亟待解決。
當(dāng)前,無(wú)人機(jī)編隊(duì)控制問(wèn)題已經(jīng)成為無(wú)人機(jī)領(lǐng)域研究的熱點(diǎn),國(guó)內(nèi)外均已開(kāi)展大量的研究工作。美國(guó)國(guó)防高級(jí)研究項(xiàng)目局(DAR-PA)資助的MICA項(xiàng)目,其研究重點(diǎn)是提高UAV的自主控制和協(xié)同控制能力[1];Galzi采用連續(xù)高階滑模控制方法設(shè)計(jì)了編隊(duì)控制器,對(duì)外界干擾有一定的抑制能力[2];景曉年等人利用圖論相關(guān)知識(shí)和多智能體系統(tǒng)一致性理論建立了集群運(yùn)動(dòng)的控制模型[3];朱熠等人基于魯棒最優(yōu)理論和動(dòng)態(tài)投影方法設(shè)計(jì)了動(dòng)態(tài)投影控制系統(tǒng)[4]。沈佩珺對(duì)小型高速無(wú)人機(jī)及其協(xié)同編隊(duì)控制進(jìn)行了研究,采用改進(jìn)的魯棒LQR結(jié)合模型參考自適應(yīng)為無(wú)人機(jī)進(jìn)行了控制律設(shè)計(jì)[5]。
本文在長(zhǎng)機(jī)和僚機(jī)相對(duì)運(yùn)動(dòng)方程的基礎(chǔ)上推導(dǎo)視線角變化的狀態(tài)方程,通過(guò)設(shè)計(jì)變結(jié)構(gòu)控制器控制視線角在某固定值,從而實(shí)現(xiàn)了無(wú)人機(jī)的編隊(duì)控制。
1 建模
針對(duì)不同的作戰(zhàn)任務(wù)需求,經(jīng)常需要多個(gè)無(wú)人機(jī)集群式執(zhí)行作戰(zhàn)任務(wù),如何保證多個(gè)無(wú)人機(jī)按照設(shè)定的隊(duì)形穩(wěn)定飛行,而不會(huì)發(fā)生碰撞,無(wú)人機(jī)的編隊(duì)控制問(wèn)題就顯得非常重要。無(wú)人機(jī)經(jīng)常使用的飛行編隊(duì)有領(lǐng)航-跟隨編隊(duì)和左右菱形編隊(duì)。本文以左右菱形編隊(duì)為研究對(duì)象,以長(zhǎng)機(jī)和僚機(jī)相對(duì)運(yùn)動(dòng)關(guān)系為基礎(chǔ)建立控制對(duì)象的狀態(tài)方程,并在此基礎(chǔ)上進(jìn)行控制器設(shè)計(jì)。
編隊(duì)飛行的平面幾何關(guān)系如圖1所示。

圖1 長(zhǎng)機(jī)與僚機(jī)相對(duì)運(yùn)動(dòng)的平面幾何關(guān)系
在oxy平面,長(zhǎng)機(jī)和僚機(jī)的速度大小相同,只要保證長(zhǎng)機(jī)和僚機(jī)視線角q控制在某個(gè)角度并保持恒定,則能保證長(zhǎng)機(jī)和僚機(jī)的隊(duì)形保持不變。
長(zhǎng)機(jī)和僚機(jī)在oxy平面內(nèi)的相對(duì)運(yùn)動(dòng)關(guān)系可用式(1)來(lái)完整描述:
(1)

為了便于進(jìn)行控制器設(shè)計(jì),首先通過(guò)相對(duì)運(yùn)動(dòng)方程,如式(1)所描述,推導(dǎo)長(zhǎng)機(jī)和僚機(jī)視線角q變化的狀態(tài)方程,推導(dǎo)過(guò)程如下。

(1)

(2)
令:
(4)
(5)
(6)
(7)
把式(4)~(7)代入式(2)和式(3),得到
(8)
(9)
(10)
(11)
2 控制器設(shè)計(jì)
由于變結(jié)構(gòu)滑模控制具有魯棒性好,抗干擾能力強(qiáng)的優(yōu)點(diǎn),本文采用變結(jié)構(gòu)控制對(duì)控制量uq進(jìn)行控制器設(shè)計(jì)。由于控制目標(biāo)是將視線角q,即x1控制在45°角并保持恒定,所以取滑模面:
(12)
由于取參數(shù)c>0,在滑模面上s=0,視線角x1=q穩(wěn)定地趨于45°角。
選取Lyapunov函數(shù)V=s2/2,將V相對(duì)于時(shí)間微分得到:
取控制:
則


至此,無(wú)人機(jī)編隊(duì)控制器的設(shè)計(jì)及其理論證明已完成,下面進(jìn)行仿真分析,驗(yàn)證控制器的有效性。
3 仿真分析
通過(guò)前面主機(jī)和僚機(jī)相對(duì)運(yùn)動(dòng)方程,系統(tǒng)狀態(tài)方程及控制器方程,建立聯(lián)立方程組如下:
(13)
方程組(13)中7個(gè)未知數(shù),7個(gè)方程,其中速率V為常數(shù),方程組存在唯一解。采用四階龍哥庫(kù)塔法求方程組的數(shù)值解。初始條件如下:主機(jī)和僚機(jī)速度均為V=30 m/s, 初始視線角35°,主機(jī)初始航向角25°,僚機(jī)初始航向角15°,主機(jī)與僚機(jī)間初始距離100 m,取常數(shù)c=2,ε=10,σ=0.01仿真步長(zhǎng)為0.001 s,仿真時(shí)間30 s。仿真結(jié)果如下:
從仿真結(jié)果(見(jiàn)圖2、圖3、圖4、圖5和圖6) 可以看出,初始時(shí)刻主機(jī)與僚機(jī)間視線角為35°,不符合編隊(duì)隊(duì)形45°地要求,在控制器作用下僚機(jī)調(diào)整航向角,使得主僚機(jī)間視線角迅速調(diào)整到45°,并保持穩(wěn)定。當(dāng)主機(jī)與僚機(jī)間視線角控制在45°后,主機(jī)與僚機(jī)間距離保持不變,整體隊(duì)形保持不變,達(dá)到了編隊(duì)控制的要求。
本文所設(shè)計(jì)的控制器還具備強(qiáng)魯棒性,下面以主機(jī)通過(guò)某障礙物作機(jī)動(dòng)后保持恒定速度直飛的例子進(jìn)行仿真驗(yàn)證。仿真中以主機(jī)航向角在初始一段時(shí)間內(nèi)為時(shí)間的正弦函數(shù)來(lái)模擬主機(jī)作機(jī)動(dòng)。
圖2 主僚機(jī)間視線角
圖3 視線角速度
圖4 僚機(jī)航向角
圖5 主僚機(jī)間距離

圖6 主僚機(jī)運(yùn)動(dòng)軌跡
從仿真結(jié)果(見(jiàn)圖7、圖8、圖9、圖10和圖11)可以看出,主機(jī)通過(guò)障礙物時(shí)航向發(fā)生變化,僚機(jī)在控制器作用下也緊跟著改變航向,盡可能保持隊(duì)形不變,從而也隨著主機(jī)繞過(guò)障礙物。主機(jī)與僚機(jī)繞過(guò)障礙物后,繼續(xù)保持原來(lái)隊(duì)形飛行。主機(jī)與僚機(jī)間視線角在繞過(guò)障礙物時(shí)存在波動(dòng),繞過(guò)障礙物后保持在45°。從前面控制系統(tǒng)建模過(guò)程可以看出,控制器將主機(jī)機(jī)動(dòng)視作干擾處理,利用變結(jié)構(gòu)控制的魯棒性對(duì)干擾進(jìn)行抑制,從而達(dá)到控制目的,仿真結(jié)果也正好驗(yàn)證了這一點(diǎn),主機(jī)繞過(guò)障礙物時(shí)作機(jī)動(dòng)改變不了控制器的穩(wěn)定性。

圖7 主僚機(jī)間視線角
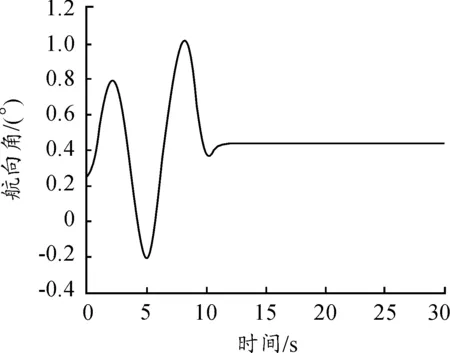
圖8 視線角速度
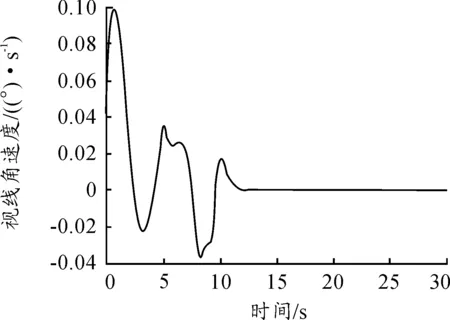
圖9 僚機(jī)航向角
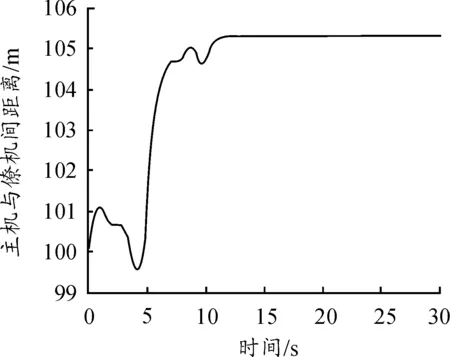
圖10 主僚機(jī)間距離
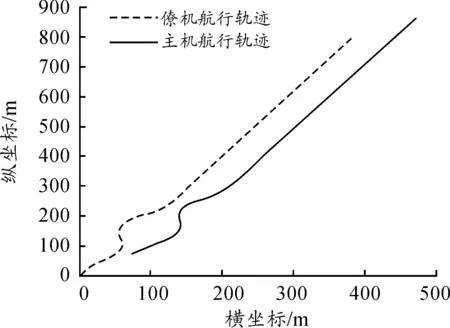
圖11 主僚機(jī)運(yùn)動(dòng)軌跡
4 結(jié)論
本文在只要能將主機(jī)與僚機(jī)間視線角控制在固定角度就能保證無(wú)人機(jī)隊(duì)形保持不變的思想指導(dǎo)下,通過(guò)主機(jī)與僚機(jī)相對(duì)運(yùn)動(dòng)方程,推導(dǎo)主機(jī)與僚機(jī)視線角變化的狀態(tài)方程,采用變結(jié)構(gòu)控制方法設(shè)計(jì)控制器。理論推導(dǎo)和仿真表明:設(shè)計(jì)的控制器能夠保證主機(jī)和僚機(jī)間的視線角控制在指定角,并且對(duì)機(jī)動(dòng)具有強(qiáng)魯棒性。
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04