電磁彈射器結構設計及其動態彈射性能
2019-08-07 00:46:10趙科義向紅軍孫麗萍高曉燕齊文達
兵器裝備工程學報 2019年7期
趙科義,向紅軍,孫麗萍,高曉燕,齊文達
(1.河北交通職業技術學院 電氣與信息工程系, 石家莊 050091;2.陸軍工程大學 彈藥工程系, 石家莊 050003;3.河北交通職業技術學院 軌道交通系, 石家莊 050035)
電磁彈射器通常用于艦載機和無人機等大質量載荷的彈射起飛[1-2]。國內外在該領域做了大量的研究工作,取得了諸多重要研究成果[3-5],但在導彈電磁彈射方面的研究相對較少。美國桑迪亞國家實驗室曾對導彈電磁發射器(Electromagnetic Missile Launcher,EMML)做了相關實驗研究工作[6],采用了多級同步感應線圈炮的結構形式,多級驅動線圈同軸直線排列,工作時需依據電樞運動位置對驅動線圈適時饋電。這種彈射方式有利于將大質量載荷加速到高速,但其高效運行精確控制難。鄒本貴等人曾對艦載導彈電磁線圈垂直發射方案進行了設計和仿真研究[7-8],采用了與桑迪亞國家實驗室類似的結構方案。王秋良等人系統分析了同軸線圈電磁推進技術關鍵技術及技術瓶頸可能的解決途徑[9]。
針對彈射速度要求不高的場合,如導彈冷發射,只需利用電磁彈射器將導彈載荷彈射到安全距離之外,再啟動火箭發動機工作即可。但目前研究較多的脈沖感應型電磁彈射裝置的彈射效率普遍較低[6,10],且彈射大質量載荷需要消耗大量的儲能,因此設計高效電磁彈射器對大載荷助推彈射具有重要意義。本文基于脈沖感應電磁彈射原理,通過驅動線圈與電樞結構設計,提出了兩種不同結構的電磁彈射器設計方案,建立了動力學模型,并在特定工況下對其動態彈射性能進行了計算仿真,研究,分析了電樞與驅動線圈之間的磁耦合情況,探討了驅動線圈的加固問題。
1 電磁彈射器的結構設計與工作原理
1.1 電磁彈射器結構設計
電磁彈射器結構1如圖1(a)所示,主要由一個圓筒狀驅動線圈和一個圓形杯狀電樞構成。這種結構與感應線圈炮結構類似,但其電樞結構不同于感應線圈炮中通常采用的圓筒狀電樞。電磁彈射器結構2如圖1(b)所示,主要由三個同軸嵌套的驅動線圈和與這三個驅動線圈布局結構相匹配的齒槽狀電樞構成。這兩種結構的電磁彈射器均關于Z軸軸對稱。在電磁彈射器結構2中,三個驅動線圈沿徑向(即X軸或Y軸方向)由外向內依次為驅動線圈1、驅動線圈2和驅動線圈3,電樞具有前端齒和后端齒,電樞尾部具有兩個圓環形槽和三個圓環形齒,圓環形槽內可容納驅動線圈2和驅動線圈3。被彈射的有效載荷可安裝于電樞前端或前端齒之間。電磁彈射器結構2之所以采用三個驅動線圈和電樞齒槽嚙合結構布局,其目的主要是為了改善驅動線圈與電樞之間的磁耦合性能,從而提高電磁彈射器的彈射效率或動態彈射性能。
將電磁彈射器結構1和電磁彈射器結構2分別簡稱為結構1和結構2。結構1中的驅動線圈和結構2中的驅動線圈1結構尺寸完全相同,相應的電樞外直徑和軸向長度也完全相同。驅動線圈的徑向厚度均為27 mm。驅動線圈1的軸向長度為150 mm,驅動線圈2和驅動線圈3的軸向長度均為100 mm。電樞與驅動線圈之間的間隙距離均為3 mm。驅動線圈1的內直徑為306 mm。電樞前端齒和后端齒的徑向厚度均為30 mm,前端齒和后端齒的軸向長度分別為50 mm和73 mm,前端齒和后端齒之間部分的電樞軸向長度為40 mm。電樞外直徑和軸向長度分別為300 mm和163 mm。
1.2 電磁彈射器的工作原理
這兩種電磁彈射器工作時均需脈沖功率電源對驅動線圈放電,放電產生的脈沖電流流過驅動線圈時會在驅動線圈周圍產生脈沖強磁場,使鋁質電樞上感生渦流。如果電樞內感應電流密度為J,電樞所在處的磁感應強度為B,則電樞受到的電磁力F可表示為
(1)
式中,V為電樞的體積。由于結構1和結構2均關于Z軸軸對稱,所以電樞受到的徑向電磁力也是關于Z軸對稱的、且相互抵消。這樣,電樞僅受到沿Z軸方向上的電磁力作用,致使電樞及載荷沿Z軸方向加速運動而被彈射出去。由于電樞電流是通過電磁感應產生的,電樞與驅動線圈之間的磁耦合性能越好,則越有利于電樞電流產生,因此改善電樞與驅動線圈之間磁耦合情況有助于提高電磁彈射器的動態彈射性能。
1.3 動力學模型及求解方法
考慮到電樞內感應渦流分布是不均勻性,可將電樞視為多個絲狀電樞圓環,并假定每個絲狀電樞圓環內的電流是均勻分布的。這樣,基于儲能脈沖電容器放電驅動的結構1和結構2系統的等效電路模型分別如圖2(a)和圖2(b)所示。
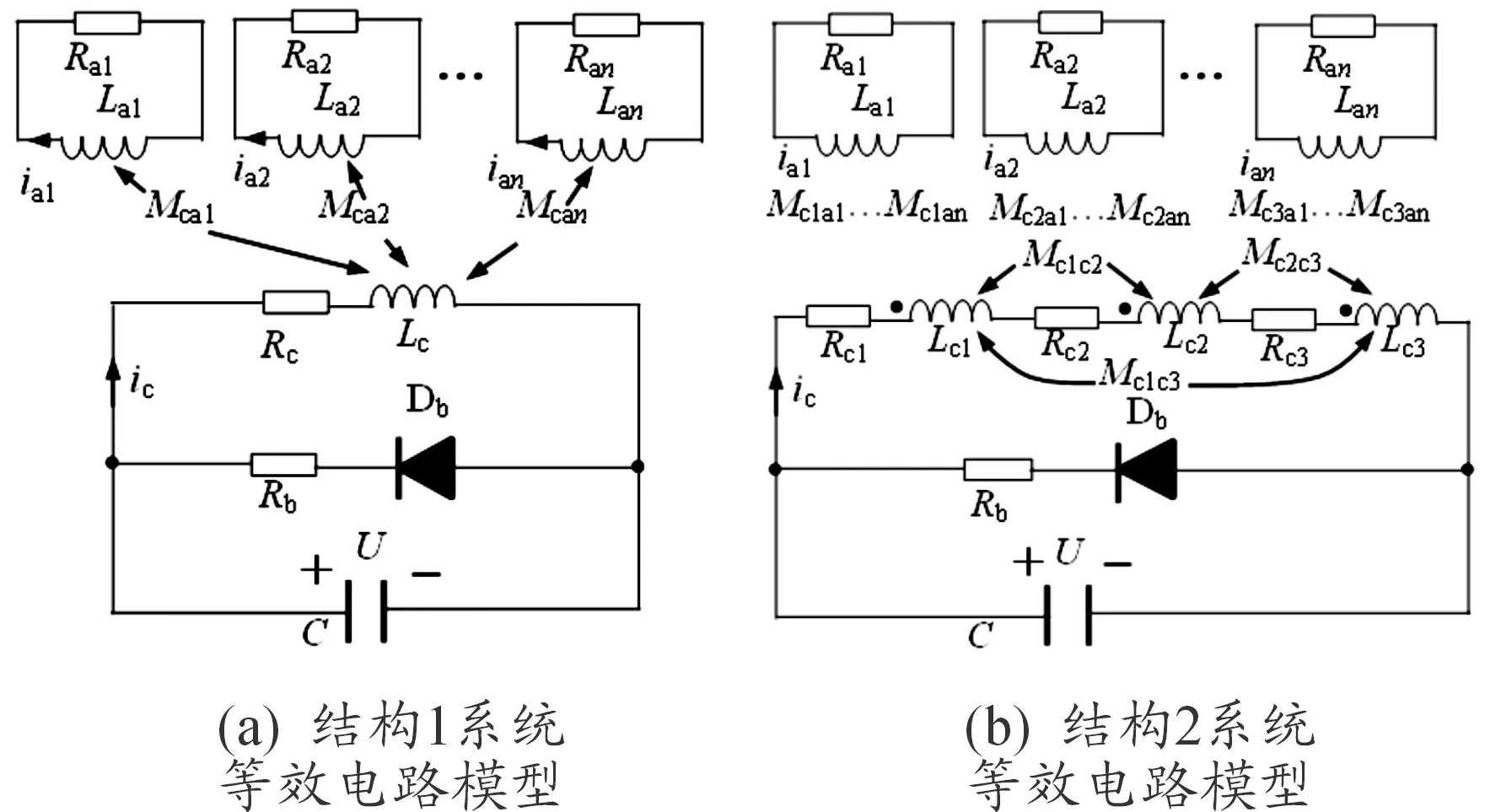
圖2 電磁彈射器結構1和結構2系統等效電路模型
Rb和Db構成續流支路;Rc、Rc1、Rc2、Rc3、和Lc、Lc1、Lc2、Lc3分別表示各驅動線圈的電阻和自感;C和U分別表示儲能脈沖電容器的容量和電壓;Mca1…Mcan、Mc1a1…Mc1an、Mc2a1…Mc2an和Mc3a1…Mc3an表示相應驅動線圈和絲狀電樞圓環間的互感。圖2中各絲狀電樞圓環間的互感中未標出。結構2系統對應的等效電路模型中的三個驅動線圈順串連接,保證了其工作時磁極極性相同。依據圖2所示的等效電路模型,可以建立矩陣形式的電路方程[11],即
(2)


續流支路作用后,電壓矩陣變為零矩陣,電阻矩陣中的元素Rc變為Rc+Rb。
對于結構2而言,電感矩陣[L]中的元素Lc需修改為Lc1+Lc2+Lc3+ 2Mc1c2+2Mc2c3+2Mc1c3;電阻矩陣[R]中的元素Rc需修改為Rc1+Rc2+Rc3;電流矩陣、電流對時間的導數矩陣和電壓矩陣保持不變。互感梯度矩陣和互感矩陣需修改為
彈射過程中儲能脈沖電容器兩端的電壓可表示為
(3)
式中,U0為電容器的初始電壓。由式(2)變形可得

(4)
彈射過程中,從彈射器內磁場儲能隨電樞位置變化的角度考慮,則電樞沿Z軸受到的電磁力為[11]
FZ=[I]T[M1][I]
(5)

第j個時間步長內電樞及載荷運動的加速度為
aj=(Fzj-G)/m
(6)
式中,G和m分別為彈射的總重量和總質量。
第j個時間步長結束時電樞及載荷的速度和位移分別為
vj=vj-1+aj(Δt)
(7)
sj=sj-1+vj-1(Δt)+0.5aj(Δt)2
(8)
利用式(2)、式(3)、式(5)、式(6)、式(8),同時結合初始條件即可描述電磁彈射器的動態彈射過程。彈射過程中由于電樞位置的不斷變化,致使電樞與驅動線圈之間的互感和系統等效輸入阻抗也在不斷變化,從而影響儲能脈沖電容器的放電情況。驅動電流的變化又會影響驅動線圈周圍的脈沖強磁場和電樞內感應渦流,從而對電樞受力產生影響。因此,動態彈射性能仿真時需要采用電路與磁場相互耦合的仿真方法,并在每一時間步長內首先依據電樞位置來計算電感等參數,再結合式(4)計算驅動電流,進而計算電樞的受力、加速度、速度和位移等參數。
2 電磁彈射器動態彈射性能仿真
2.1 對比研究的相關假定
由于結構1和結構2所采用的驅動線圈個數不同,對應的電樞形狀也不同,所以兩者對應的驅動回路參數也不同。為使結構1和結構2的動態彈射性能具有可比性,現假定如下:(1)被彈射的電樞與載荷的總質量相同,均為500 kg;(2)驅動用脈沖功率電源參數完全相同,即儲能脈沖電容器的容量均為20 mF,初始放電電壓均為10 kV;(3)彈射時電樞所處的初始位置相同,電樞末端均距離X軸30 mm;(4)均考慮電樞及載荷自重的影響,但均忽略空氣阻力的影響。
在上述假定下,通過比較結構1和結構2在彈射過程中電樞及載荷所獲的動能與消耗的脈沖功率電源儲能之比的方法,即通過彈射效率分析的方法即可衡量這兩種電磁彈射器動態彈射性能的優劣。
2.2 仿真模型的建立
Ansoft電磁場有限元分析軟件中的瞬態求解器可用于運動導體的計算問題[12],故采用其進行建模。由于結構1和結構2均為軸對稱結構,所以建立二維軸對稱仿真模型,如圖3。整個外邊框包圍的區域為求解區域,內邊框所包圍的區域為電樞運動區域。
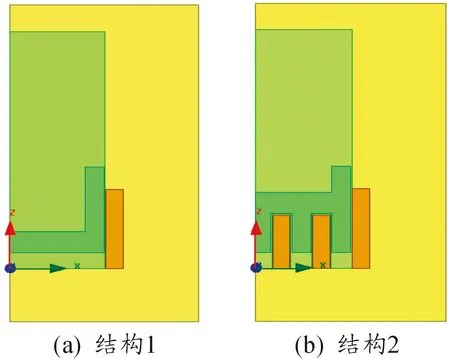
圖3 兩種不同結構的電磁彈射仿真模型
2.3 動態彈射性能仿真及結果分析
仿真過程中,均采用了外電路加載方式。結構1和結構2對應的驅動電路分別如圖4(a)和圖4(b)所示。圖4(a)中驅動線圈的匝數為120匝,設其直流電阻Rc1為180 mΩ;圖4(b)中驅動線圈1、驅動線圈2和驅動線圈3的匝數分別為120匝、80匝和80匝,設其直流電阻Rc1、Rc2和Rc3分別約為180 mΩ、76 mΩ和30 mΩ。這里給出的各驅動線圈的直流電阻是依據其結構參數和匝數計算得到的,仿真時需將其與驅動線圈串聯。本文對結構2在磁極極性相同驅動方式下的動態彈射性能與結構1的動態彈射性能進行對比研究。
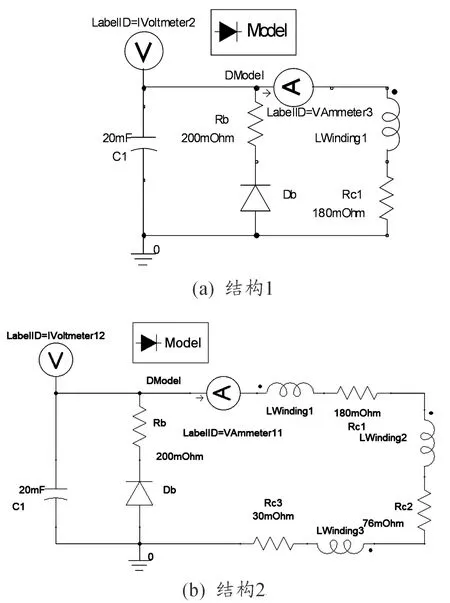
圖4 結構1和結構2的驅動電路
將驅動線圈和電樞的材料分別設置為銅和鋁。設電樞的初始速度為0 m/s,電樞及載荷的總質量為500 kg。在垂直彈射的情況下,設置負載力為電樞及載荷的總重量5 000 N。
圖5中(a)、(b)、(c)、(d)、(e)分別給出了這兩種不同結構電磁彈射器在上述工況下的動態彈射性能,即驅動電流I、儲能脈沖電容器兩端的放電電壓U、電樞受到的電磁力F、電樞的運動速度v和運動位移p隨時間變化的規律。
由圖5(a)可知,結構1在彈射過程中驅動電流峰值相對較大,且約于5.8 ms達最大值17.187 kA;結構2在磁極極性相同的驅動方式下對應的驅動電流峰值相對小得多,且于4.68 ms達到最大值11.038 kA。由圖5(b)可知,結構2在磁極極性相同的驅動方式下儲能脈沖電容器放電比較緩慢,而結構1在彈射過程中儲能脈沖電容器放電相對更快。
由圖5(c)和圖5(d)可以看出,結構2的動態彈射性能相對更好,電樞受到的電磁力相對更大(約于5.8 ms時達到最大值2.078 MN),所獲得的運動速度也相對更大(約于12.14 ms時獲得最大速度24.44 m/s)。結構1的動態彈射性能相對稍差,彈射過程中電樞約于6.46 ms獲得約1.66 MN的最大電磁力作用,并約于13.22 ms獲得23.56 m/s的最大速度。結構1和結構2中的電樞分別約于13.4 ms和12.1 ms開始受到制動性電磁力的作用,對應的運動位置分別約為158 mm和155 mm。電樞運動位移如圖5(e)所示。由結構參數可知:電樞受制動力作用時,結構1中電樞末端已越過了驅動線圈前端面約38 mm;結構2中電樞尾部也已越過了驅動線圈1的前端面約35 mm。
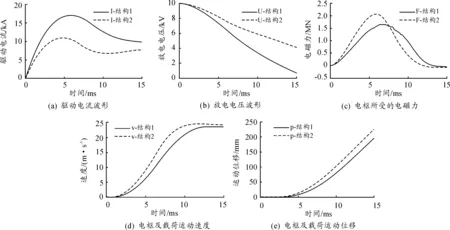
圖5 兩種不同結構電磁彈射器動態彈射性能曲線
2.4 效率分析
為評價這兩種不同結構電磁彈射器的動態彈射性能,下面從彈射效率的角度進行衡量。從圖5(c)和圖5(d)可以看出,盡管電樞在彈射末期均會受到制動電磁力的作用,但制動電磁力相對較小,對運動速度影響不大。因此,可依據獲得的最大動能與獲得最大動能時儲能脈沖電容器所釋出來的能量之比來衡量其彈射效率。據此可將彈射效率表示為
(9)
式中,U0=10 kV,UVmax為獲得最大速度時儲能脈沖電容器兩端的電壓。對結構1和結構2而言,獲得最大速度時UVmax分別約為1.57 kV和5.17 kV。依據這些數據和式(9),對結構1和結構2計算所得的彈射效率分別約為14.23%和20.38%。這意味著在獲得最大速度之后,如果能夠對儲能脈沖電容中的剩留儲能進行回收,則結構2在可獲得相對高得多的彈射效率。
由于結構2在獲得最大速度時仍具有大量的系統儲能,包括儲能脈沖電容器中的電場能量和驅動回路電感中的磁場能量,所以對結構2系統中的剩留儲能進行回收是有必要的。回收系統剩留儲能的方法是:在電樞及載荷獲得最大速度時,斷開儲能脈沖電容器使其停止放電,同時通過換路措施對驅動線圈中儲存的磁場能量進行回收,即讓驅動電流對另一組儲能脈沖電容器充電。如果能夠對系統中的剩留儲能全部予以回收,則結構2的彈射效率將會高于20.38%。這為高效電磁彈射器的設計提供了一種實現方法和思路。
如果不能對電樞及載荷獲得最大速度后的系統剩余能量進行回收,則需依據電樞及載荷獲得的最大動能與儲能脈沖電容器初始儲能之比來衡量電磁彈射器的彈射效率,即依據式(10)評價彈射效率。
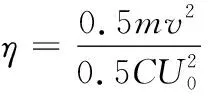
(10)
依據式(10)計算的結果為:結構1的彈射效率約為13.88%;結構2在磁極極性相同的驅動方式下對應的彈射效率約為14.93%。這表明:在不能對電磁彈射器系統中的剩余儲能進行回收時,結構2在磁極極性相同驅動方式下的彈射效率仍稍好于結構1的彈射效率,但其彈射效率優勢已并不明顯。
結構2系統能在儲能脈沖電容器放電相對較少的情況下獲得最大運動速度,這使得通過回收系統剩留儲能來提高彈射效率成為可能;而結構1中儲能脈沖電容器只有釋放出約90%的初始儲能才能獲得最大速度,故對結構1系統中剩留儲能回收意義不大。
2.5 電樞與驅動線圈間的磁耦合情況分析
電樞與驅動線圈之間磁耦合情況會直接影響電樞內感應電流和電磁力分布,進而影響彈射性能。為比較結構1和結構2中電樞與驅動線圈之間的磁耦合情況,取電樞運動位移均約為20 mm時情況進行說明。結構1中的運動位移約為20 mm時對應于時間t=6.24 ms,相應的驅動電流約為17.08 kA,對應的電流分布情況圖6(a)。結構2中的運動位移約為20 mm時對應于時間t=5.6 ms,相應的驅動電流約為10.73 kA,對應的電流分布情況如圖6(b)。
從圖6(a)可以看出:電樞內感應渦流的分布是很不均勻的,主要集中在電樞尾部外邊緣處,并依次由徑向向內和沿Z軸正向逐漸變小;而從圖5(b)可知,電樞內的感應電流分布雖然仍集中在尾部齒區域,但是從整體上來看,電樞內感應電流的分布相對均勻得多。這說明結構2與結構1相比,能更好地實現電樞與驅動線圈之間的磁耦合。這也正是結構2在儲能脈沖電容器放電相對較少條件下就能獲得最大運動速度的原因,從而為回收系統剩留儲能、提高彈射效率提供了可能。
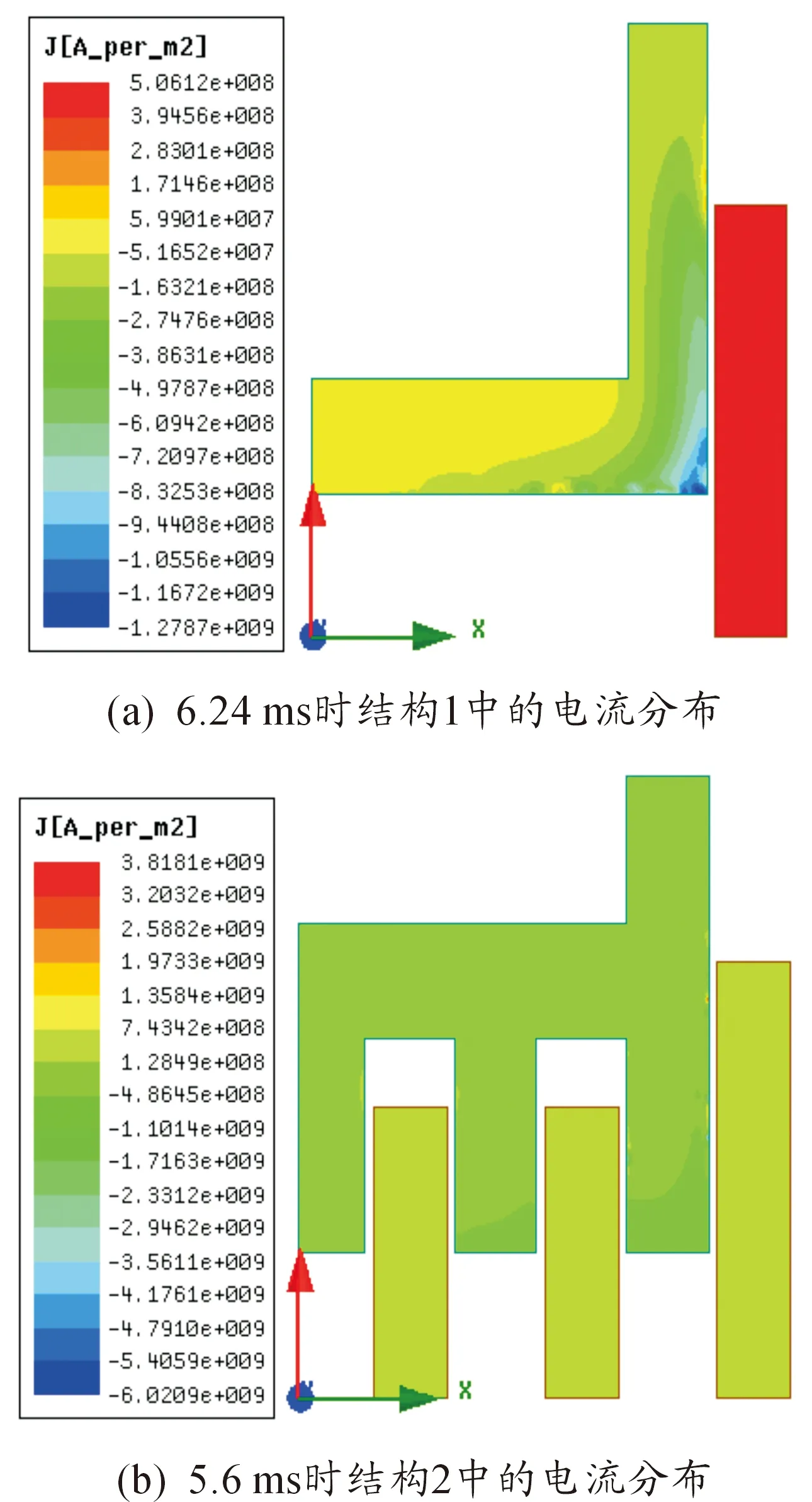
圖6 驅動線圈和電樞內的電流分布
2.6 驅動線圈加固問題探討
結構2中三個同軸安裝的驅動線圈在彈射過程中會受到很大電磁力的作用,因此必須采用高強度、非磁性復合絕緣材料對其可靠加固。在實際設計過程中,可采用玻璃纖維、凱夫拉、柴龍等[9]高強度復合材料分層、分角度纏繞,并對纏繞后的驅動線圈利用環氧樹脂真空灌注一體化封裝等措施。當然,還需要反復計算驅動線圈受力及加固結構在受電磁力作用下的應力應變情況。當不能獲得高強度加固材料或加固強度不夠時,應通過適當增大電樞與驅動線圈間的間隙距離,增加加固結構厚度來實現驅動線圈的可靠加固,當然這會犧牲彈射效率。
3 結論
與結構1相比,結構 2能更好地實現電樞與驅動線圈之間的磁耦合,使電樞內感應電流分布相對更均勻、電樞受到電磁力不僅更大而且相對更均勻、動態彈射性能相對更好。在電樞及載荷獲得最大運動速度之后,如果不能對整個電磁彈射器系統中的剩留儲能進行回收,則結構2的動態彈射性能稍好于結構1的動態彈射性能,如果能夠對儲能脈沖電容器中剩留的儲能進行回收,則結構2顯著提高彈射效率至20.38%。結構2與剩留儲能回收相結合的方法將成為提高彈射效率的重要實現途徑。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
商周刊(2017年9期)2017-08-22 02:57:49
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
時代英語·高二(2015年1期)2015-03-16 00:08:11
現代企業(2015年9期)2015-02-28 18:56:50
中國衛生(2014年11期)2014-11-12 13:11:32