雷達干擾效果評估與協(xié)同干擾策略分配算法研究
2019-08-07 10:04:44譙梁,楊帥,王鑫,陳飛
航天電子對抗 2019年3期
譙 梁,楊 帥,王 鑫,陳 飛
(1.中國航天科工集團有限公司科研部,北京 100089; 2.中國航天科工集團8511研究所,江蘇 南京 210007)
0 引言
隨著現(xiàn)代雷達性能的不斷提高,尤其是組網(wǎng)雷達在工作頻段、工作體制、布站協(xié)同等方面全面加強了雷達對目標(biāo)的探測、跟蹤、引導(dǎo)能力,這對雷達對抗提出了新的挑戰(zhàn)[1]。面對組網(wǎng)雷達的威脅,由于干擾機波束寬度的限制,尤其是在雷達燒穿距離到干擾機距離雷達幾十千米范圍內(nèi),雷達網(wǎng)的布站導(dǎo)致一部干擾機無法干擾到所有的雷達,從而使目標(biāo)暴露在敵方雷達中[2]。因此,對應(yīng)組網(wǎng)雷達的概念,現(xiàn)代雷達對抗提出了協(xié)同干擾的概念,而如何有效地使用協(xié)同干擾編隊中的干擾機使目標(biāo)暴露的概率大大降低是協(xié)同干擾的重中之重,而協(xié)同干擾策略分配又是其中最重要的部分。
干擾評估準(zhǔn)則是指導(dǎo)干擾效果評估指標(biāo)的原則,它從理論上推導(dǎo)了干擾效果指標(biāo)與雷達參數(shù)之間的聯(lián)系,在眾多的評估準(zhǔn)則中選取信息準(zhǔn)則作為本文總綱領(lǐng),指導(dǎo)干擾效果評估指標(biāo)的選取;雷達干擾效果評估是建立在雷達干擾效果評估指標(biāo)上的,也就是說干擾效果指標(biāo)是干擾效果評估的重要依據(jù),只有正確的干擾評估指標(biāo)才能反映雷達在被干擾前、后的工作狀態(tài)差異,該指標(biāo)也是用來評價干擾有效程度的重要指標(biāo),以此指標(biāo)為基礎(chǔ)通過分配算法得到相對合理的分配策略。
協(xié)同干擾策略制定過程通常是分選后的一個重要過程,它是在干擾主機與各分機偵察得到各方位向的雷達信號后,通過通信分選得到雷達網(wǎng)中各雷達信息并對其威脅評估、干擾。而傳統(tǒng)的分配算法,如動態(tài)規(guī)劃法[3]、0-1規(guī)劃算法[4]等不具有實時性,因此,將遺傳算法引入到策略制定中,并針對其收斂性等方面進行改進,使得算法具有收斂速度快的優(yōu)點,又不易陷入到局部最優(yōu)解中。
1 干擾評估準(zhǔn)則
雷達干擾效果評估最主要的作用是判斷干擾的有效程度。在正確獲取干擾有效程度的過程中需要建立相應(yīng)的數(shù)學(xué)模型,該模型的有效性及合理性需要相應(yīng)的干擾效果評估指標(biāo)進行表征,干擾效果評估指標(biāo)的選取需要遵照一定的原則,即干擾評估準(zhǔn)則。現(xiàn)階段,干擾評估準(zhǔn)則被具體化成了很多不同準(zhǔn)則,但是還沒有一個公認(rèn)的評估準(zhǔn)則用于指導(dǎo)干擾效果指標(biāo)的選取。根據(jù)雷達干擾效果指標(biāo)的不同類型,可以將干擾效果評估指標(biāo)根據(jù)對雷達及其附屬裝備的殺傷性質(zhì)(軟殺傷和硬殺傷)分為兩種最基本的評估準(zhǔn)則:信息準(zhǔn)則與戰(zhàn)術(shù)應(yīng)用準(zhǔn)則[2]。
由于本文中只涉及到對雷達工作性能的影響,因此選擇信息準(zhǔn)則為干擾效果評估指標(biāo),定量地表征干擾對雷達工作性能的影響程度。在雷達對抗領(lǐng)域中,眾多學(xué)者根據(jù)產(chǎn)生干擾的原理、干擾雷達的機理又將上述兩種評估準(zhǔn)則具體化為多種不同的評估準(zhǔn)則,如信息和接收信息量準(zhǔn)則、功率準(zhǔn)則等等。
1.1 信息和接收信息量準(zhǔn)則
信息與信息接收量準(zhǔn)則是源自通信領(lǐng)域的概念。雷達在本質(zhì)上就是獲取一些關(guān)于目標(biāo)的信息的裝置,只是雷達是自己產(chǎn)生信號并通過接收、處理該信號來獲取目標(biāo)信息的,但是信號本身就攜帶信息,所以,信息接收量也可以用于雷達對抗領(lǐng)域中。
離散型隨機變量與連續(xù)型隨機變量的接收信息量定義為:
(1)

(2)
根據(jù)式(1),雷達在離散信息源中所能獲取到的關(guān)于目標(biāo)的信息量為:
logaP(si/xi)
(3)
式中,P(si/xi)表示雷達在接收到信號xi之后能夠確定雷達得到的信號,就是目標(biāo)si的目標(biāo)回波或者目標(biāo)存在的后驗概率;P(si)表示在未接收到信號xi前雷達了解到的關(guān)于目標(biāo)存在的先驗概率。如果雷達接收到的信號之間是獨立不相關(guān)的,那么假設(shè)接收到的n個信號的總的接收信息量可以表示n個信號接收信息量之和,可表示為:
(4)
離散信號的平均信息接收量為:
(5)
應(yīng)用概率乘法公式以及去概率公式可以得到其展開式為:
(6)
式(1)~(6)表示可以用接收信息量準(zhǔn)則評價雷達信號。
1.2 干擾效果指標(biāo)與信息和信息接收量之間的關(guān)系
雷達在對目標(biāo)探測與跟蹤的過程中,涉及到對目標(biāo)的檢測概率以及目標(biāo)三維坐標(biāo)之間的參數(shù)估計問題,下面就從這兩方面分析干擾效果與評估準(zhǔn)則之間的聯(lián)系。
1.2.1 檢測概率與接收信息量
雷達在檢測目標(biāo)的過程中主要是根據(jù)在某一時段內(nèi)的雷達接收到的信號來判斷目標(biāo)是否存在,通常是用檢測概率來表示當(dāng)目標(biāo)存在時,雷達在當(dāng)前接收到的信號序列下判斷目標(biāo)存在的概率;而當(dāng)目標(biāo)不存在時,雷達判定目標(biāo)存在的概率稱為虛警概率;與檢測概率相對應(yīng),當(dāng)目標(biāo)存在時,雷達判定目標(biāo)不存在的概率為漏警概率[5]。
雷達對目標(biāo)的檢測一般是應(yīng)用檢測與估計的相關(guān)理論來判斷目標(biāo)存在的有無。目標(biāo)檢測與估計理論在此不再做詳細的推導(dǎo)。
假設(shè)雷達在有無目標(biāo)時的似然比檢測表示為:
(7)
在雷達領(lǐng)域中,通常用平均信息量來表示似然比。雷達在有、無目標(biāo)存在時所有獲取的平均信息量之差為:
logal(x)=H(S,X)-H(0,X)
(8)
式中,l(x)表示似然比,H(0,X)表示在沒有目標(biāo)存在時雷達接收機接收到的平均信息量,H(S,X)表示在有目標(biāo)存在時雷達接收機接收到的平均信息量。
將式(8)還原表示為:
l(x)=aH(S,X)-H(0,X)
(9)
根據(jù)似然比檢測與檢測概率之間的關(guān)系,可以得到檢測概率與平均信息量之差之間的聯(lián)系,可表示為
Pd=aH(S,X)-H(0,X)Pfa
(10)
式(10)即表示了檢測概率與信息接收量之間的聯(lián)系。
1.2.2 參數(shù)估計與接收信息量
與目標(biāo)檢測的原理類似,參數(shù)估計也是在有、無目標(biāo)存在時根據(jù)雷達接收機的機內(nèi)噪聲對參數(shù)估計的影響來確定目標(biāo)的相關(guān)參數(shù)的。根據(jù)相關(guān)參數(shù)的估計可以得到,參數(shù)估計與信息接收量之間的關(guān)系為:
(11)
式中,θ表示需要估計的參數(shù),P(x)表示測試量的概率密度函數(shù),σ表示參數(shù)測量誤差。
2 干擾效果評估指標(biāo):檢測概率
在較遠距離時,雷達網(wǎng)以發(fā)現(xiàn)目標(biāo)是否存在為主要作戰(zhàn)任務(wù),只有在雷達網(wǎng)發(fā)現(xiàn)目標(biāo)之后,才會依次轉(zhuǎn)入定位、跟蹤以及火力引導(dǎo)等階段,因此,以發(fā)現(xiàn)概率作為搜索階段協(xié)同干擾效果評估準(zhǔn)則對干擾資源進行分配[6]。
根據(jù)雷達方程和干擾方程可知:
(12)
雷達的信干比為:
(13)
式中,雷達目標(biāo)回波功率為Prs;雷達接收機接收到的干擾信號功率為Prj;Pt和Pj分別表示雷達發(fā)射機和干擾發(fā)射機發(fā)射的雷達信號功率和干擾信號功率;Gt和Gj分別表示雷達接收機和干擾機的接收天線增益;σ表示目標(biāo)的平均散射面積;λ表示雷達發(fā)射射頻信號的波長;Rt表示雷達與目標(biāo)之間的空間距離;Rj表示干擾機與雷達之間的空間距離。
雷達對目標(biāo)的檢測概率可以利用下式進行近似運算:
(14)

利用式(12)可以計算得到雷達在無干擾時的信噪比,利用式(13)可得到雷達距目標(biāo)為Rt以及距干擾機為Rj時的信干比,并將之代入式(14),可以得到無、有干擾時的檢測概率分別為Pd、Pdj。單部雷達的目標(biāo)函數(shù)定義為:
Ed=|Pd-Pdj|/Pd
(15)
組網(wǎng)雷達融合發(fā)現(xiàn)概率為:
(16)
式中,D為融合中心產(chǎn)生的系統(tǒng)判決向量。
根據(jù)式(15),可知Ed的值越大,雷達檢測概率降低得越快,干擾效果越好。
將式(16)代入式(15)即可得到組網(wǎng)雷達檢測概率在搜索階段雷達網(wǎng)的目標(biāo)函數(shù)值。
ED=|PD-PDj|/PD
(17)
仿真分析:干擾機從坐標(biāo)為(200,300,10)處向目標(biāo)做勻速直線運動,攻擊目標(biāo)坐標(biāo)為原點(0,0,0)。將攻擊航跡由遠及近均勻劃分為100個采樣點,每個采樣點代表該點需要重新進行干擾策略分配。雷達與干擾機參數(shù)設(shè)置:雷達的發(fā)射功率Pt=630 kW,發(fā)射和接收天線增益Gt=40 dB,虛警概率Pfa=1×10-6,雷達信號的頻率為6 GHz,目標(biāo)截面積σ=10 m2,干擾機發(fā)射功率Pt=100 W,干擾機天線增益Gj=20 dB。4部雷達的參數(shù)除坐標(biāo)位置不同之外,其余全部相同。4部雷達與雷達網(wǎng)的檢測概率如圖1、圖2所示。
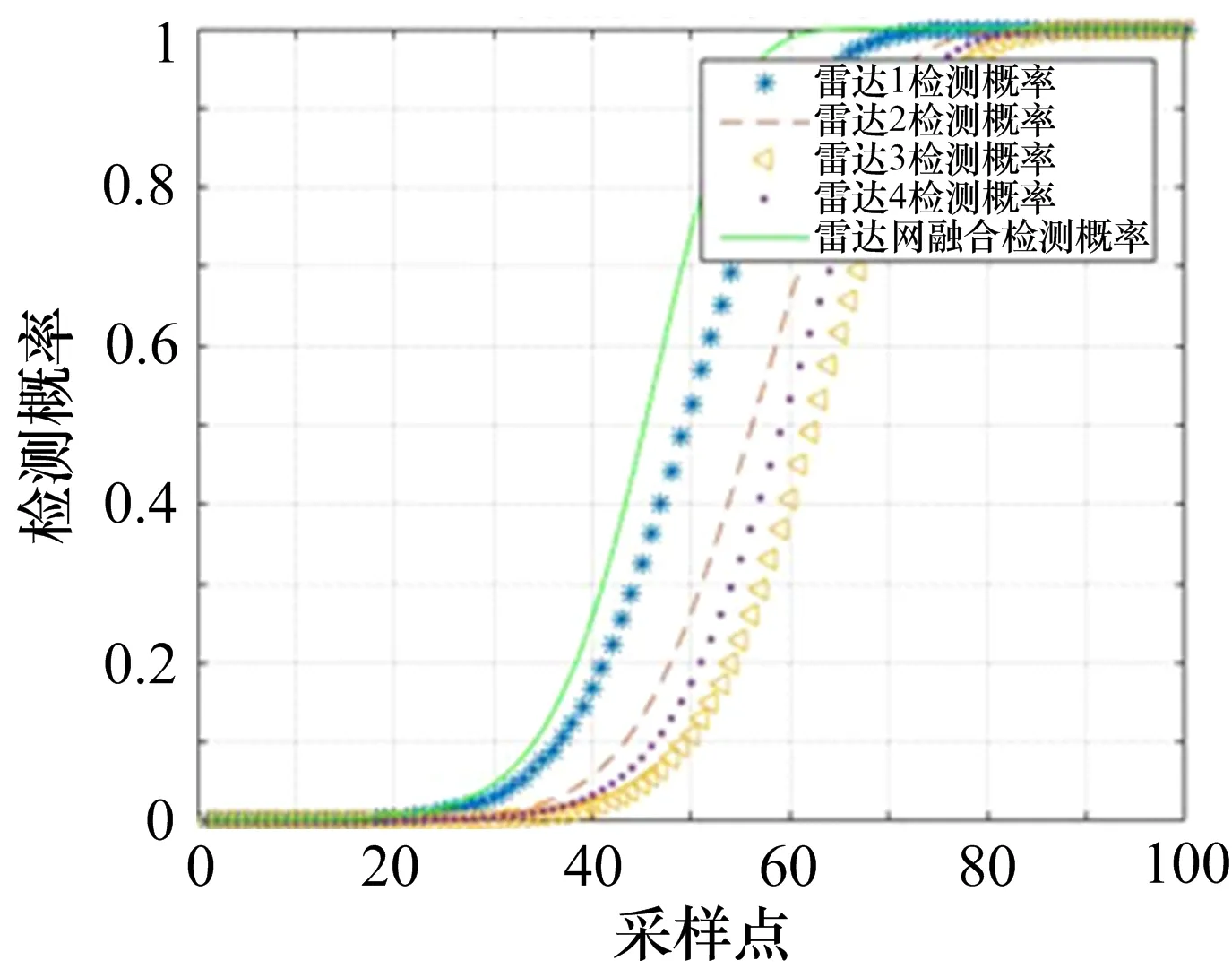
圖1 無干擾時雷達網(wǎng)的檢測概率
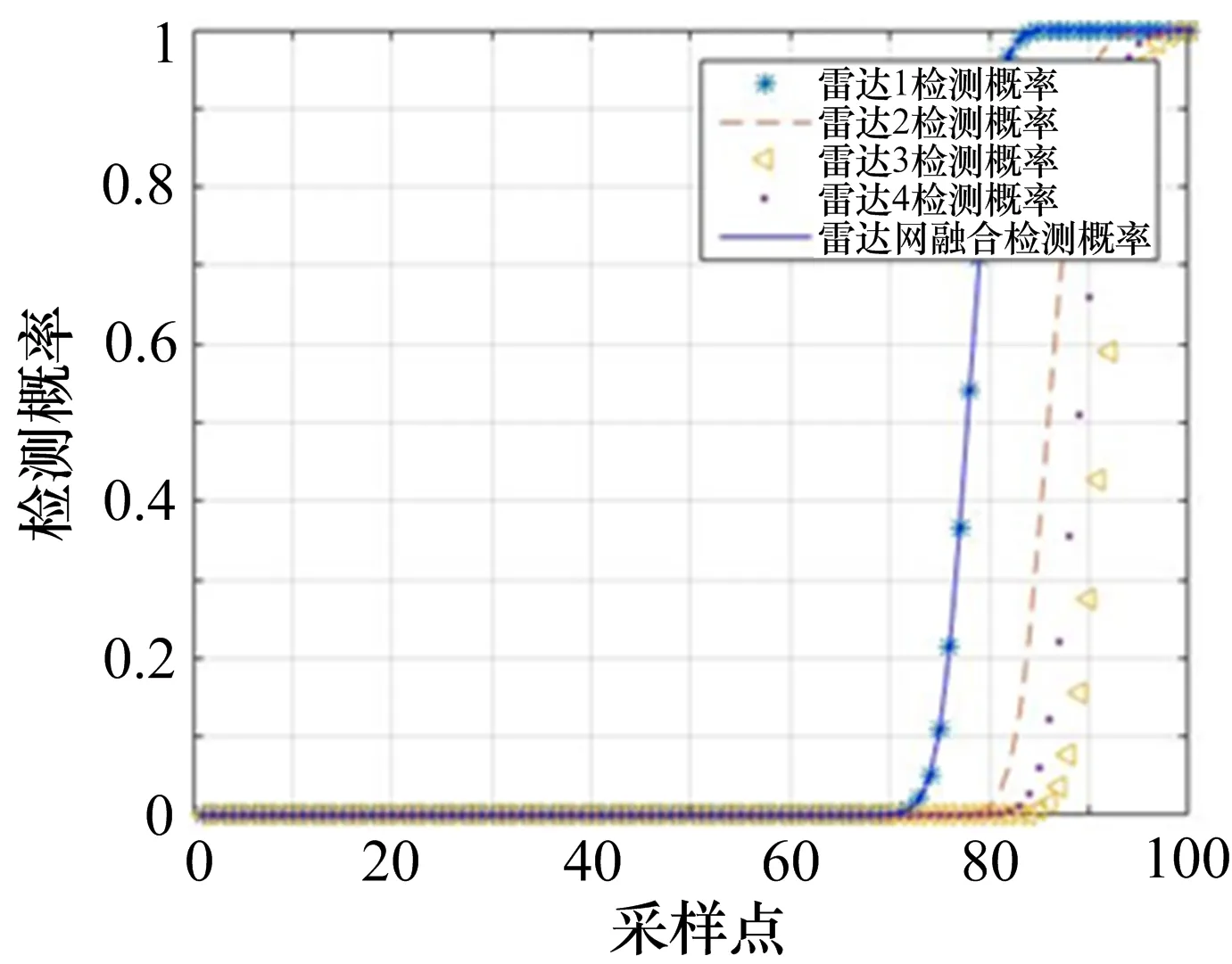
圖2 存在干擾時雷達網(wǎng)的檢測概率
從圖1可以看出,雷達網(wǎng)中各雷達的參數(shù)盡管都是相同的,但是由于雷達在空間中的站址不同,所以在同一采樣點上各雷達接收到的信號信噪比是不同的,從而導(dǎo)致在同一采樣點上對目標(biāo)的檢測概率也是不同的;除此之外,還可以分析得到,4部雷達通過組網(wǎng)對目標(biāo)的檢測概率相對于單部雷達是有上升的。
從圖2中可觀察得到,在有干擾信號存在時,由于雷達接收到的目標(biāo)回波信號質(zhì)量變差,信號中往往夾雜著大量的干擾信號,所以在不同距離上的檢測概率與無干擾時有很大不同。對比圖1和圖2可以發(fā)現(xiàn),無干擾時雷達完全可以發(fā)現(xiàn)目標(biāo)的距離為采樣點60,干擾后則為采樣點82左右,以干擾機與目標(biāo)之間的距離作為衡量,可以算出檢測概率下降了50%左右。上述仿真分析證明了將檢測概率作為衡量干擾效果的有效性。
3 干擾策略分配算法
3.1 干擾策略分配模型
干擾策略分配算法不僅關(guān)注對現(xiàn)有干擾資源的分配,還要關(guān)注對干擾樣式的分配,其分配模型如圖3所示。
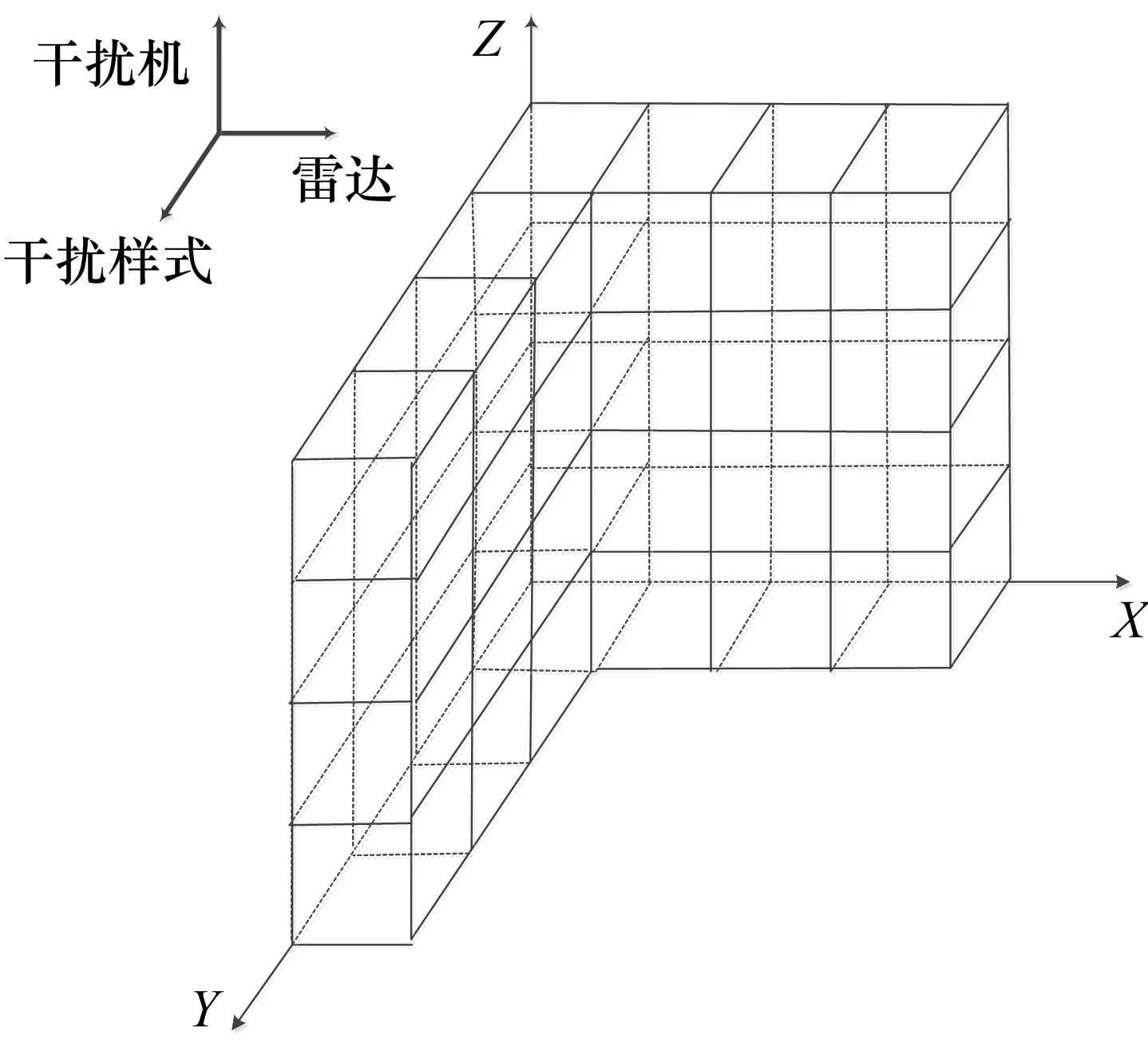
圖3 策略分配算法模型
分配過程為:假設(shè)整個干擾系統(tǒng)有N個干擾資源,接收到M個威脅目標(biāo)。首先將接收到的M個威脅目標(biāo)的參數(shù)代入威脅等級威脅模型公式,對每個目標(biāo)的威脅等級進行判定求值,按照威脅等級由高到低的順序,在干擾分配過程中將資源向?qū)δ繕?biāo)威脅程度最大的雷達傾斜,其次才是將剩余資源分配給相對威脅較小的雷達,直到所有的干擾資源分配完畢。
為便于學(xué)生理解數(shù)據(jù)結(jié)構(gòu)的算法,將算法結(jié)果可視化,輸出直觀的圖像。以構(gòu)建二叉樹輸出二叉樹的圖像為例,無須思考在命令行中輸出圖像的坐標(biāo)位置,層次遍歷輸出描述二叉樹的DOT文件,在Graphviz軟件中查看二叉樹圖像結(jié)果。
3.2 干擾分配算法
實質(zhì)上動態(tài)規(guī)劃算法是按照一定規(guī)則對所有可能的干擾分配采用窮舉法算出各種分配下的干擾效果,但是隨著雷達網(wǎng)的雷達數(shù)量以及干擾機數(shù)量的增大,該算法會出現(xiàn)計算量爆炸的問題。以空間中4部干擾機干擾4部雷達為例,在不考慮干擾樣式的情況下,采用一對一的雷達資源分配時,需要分配的策略才188種,而考慮一部干擾機最多可干擾兩部雷達的情況,干擾資源分配所需要考慮的情況多達1296種,是一對一干擾的7倍之多;如果每部干擾機有三種干擾樣式需要進行分配,將這種情況再考慮進去,則需要分配的策略可高達104976種。假設(shè)仍然采用動態(tài)規(guī)劃算法對資源分配進行計算,將不具有實時性,而且分配的過程極其繁復(fù)。因此,將智能優(yōu)化算法引入到資源分配中,一方面,可以更快地找到最優(yōu)的分配策略,另一方面也可以將整個分配問題簡單化。
3.2.1 遺傳算法
遺傳算法(GA) 將自然選擇中的“交叉”和“變異”兩種基本概念作為算法的核心。GA算法在很多領(lǐng)域中都有應(yīng)用,在干擾策略分配過程中,GA算法能夠運用其強大的尋優(yōu)能力得到最優(yōu)的策略分配,提高干擾機的利用效率。
遺傳算法中根據(jù)適應(yīng)度大小按照“優(yōu)勝劣汰、適者生存”的原則選出個體,借助遺傳學(xué)中的遺傳算子對個體進行組合交叉、變異等操作得到新的種群[4-6]。相比于上一代種群,新種群遺傳了具有較強適應(yīng)度個體的基因,因此,新種群的適應(yīng)能力更強,從而向全局最優(yōu)解逐漸靠近,最終尋求到全局最優(yōu)解。
遺傳算法應(yīng)用于干擾資源分配的具體流程為:
1)隨機產(chǎn)生初代種群干擾分配策略,并對分配策略進行二進制編碼;
2)用輪盤賭策略確定種群中個體分配策略的目標(biāo)函數(shù)值,并對此值進行適應(yīng)度評價,判斷是否是最優(yōu)分配策略,如果是,則結(jié)束迭代,輸出最優(yōu)解,如果不是,則繼續(xù)步驟3);
3)根據(jù)每個個體的適應(yīng)度大小選擇種群中相對最優(yōu)的個體;
5)隨機產(chǎn)生個體中需要變異的編碼基因的位置,對二進制的基因編碼來說,變異操作即將需要變異的基因取反,即將0變成1、1變成0;
6)對經(jīng)過交叉、變異操作之后產(chǎn)生的新種群返回步驟2)。
3.2.2 遺傳算法的改進
遺傳算法中交叉和變異概率是影響算法收斂的重要因素。基本遺傳算法中交叉和變異的概率是一定的,本文中,根據(jù)每一代種群中最優(yōu)適應(yīng)度和平均適應(yīng)度,做自適應(yīng)的交叉和變異概率,提高迭代過程中尋優(yōu)的能力,該改進算法可以避免過早地陷入到局部最優(yōu)解從而影響算法的性能。
1)選擇操作的改進
選擇操作是采用“優(yōu)勝劣汰”的原則挑選個體,這些個體都是該種群中對求解問題的相對最優(yōu)解,將之作為下一代種群需要交叉、變異的父代和母代,進行下一步操作。傳統(tǒng)算法中種群最優(yōu)個體也是要經(jīng)過交叉、變異,將種群中具有良好適應(yīng)能力的基因編碼破壞,參與到下一代種群的迭代中。本文中將最優(yōu)個體的基因組成保留,使之不參與到后續(xù)的交叉、變異中去。基本遺傳算法中是隨機選擇個體,而改進的操作算法中是將具有較高適應(yīng)度的個體挑選出來進行交叉變異。選擇操作的改進有助于留下最優(yōu)的個體,而不是完全隨機地選擇個體交叉、變異,通過這些最優(yōu)個體的不斷競爭留下種群中的最優(yōu)個體,保證每個種群中的個體都是適應(yīng)度比較好的。
2)交叉操作的改進
交叉操作的染色體選取與交叉概率有關(guān),基本遺傳算法的交叉概率是一定的,如果算法的交叉概率過大,適應(yīng)度較好的個體容易被交叉,使得整個算法不容易收斂;交叉概率如果太小,種群中個體的多樣性又無法得到保證。因此,本文中為了平衡算法的收斂性以及初期種群個體的多樣性,采用自適應(yīng)的交叉概率,公式如式(18)所示:
if(f>favg)
Pe=(Pemax-Pemin)/(1+exp(A(1-
2(fmax-f)/(fmax-fmin))))
else
Pe=Pmin
(18)
式中,favg表示種群個體的平均適應(yīng)度,fmax、fmin表示種群中最大、最小的適應(yīng)度,Pemax、Pemin分別表示最大、最小的交叉概率,f表示種群中需要進行交叉的個體的適應(yīng)度。A表示調(diào)整系數(shù)。
3)變異操作的改進
在算法初期,由于種群中個體的差異都比較大,在這個階段如果進行局部精確搜索,會導(dǎo)致收斂速度過慢,所以應(yīng)該采用較低的變異概率;而在算法后期,種群中的優(yōu)秀個體逐漸趨同,應(yīng)該增大變異概率,使在當(dāng)前的個體中進行精確的局部搜索,有助于算法的快速收斂。文中變異概率采用式(19)確定:
if(f>favg)
Pm=(Pmmax-Pmmin)/(1+exp(A(1-2(fmax-f)/(fmax-fmin))))
else
Pm=Pmmin
(19)
式中,Pmmax、Pmmin分別表示最大、最小的變異概率。
4 仿真分析
假設(shè)在某一戰(zhàn)場區(qū)域,雷達網(wǎng)由N=8部雷達組成,干擾機編隊由M=4部組成,用于保護突防飛機不被發(fā)現(xiàn)。雷達網(wǎng)的布站為方形布站,雷達、目標(biāo)、干擾機編隊的位置及其航跡如表1、圖4所示。

表1 雷達位置信息 km
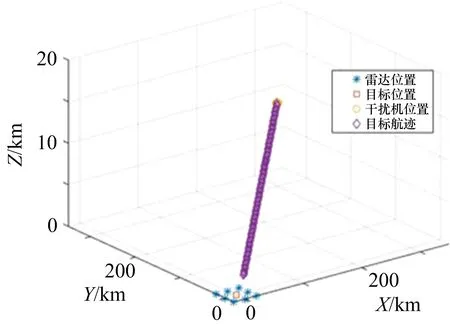
圖4 目標(biāo)攻擊航跡
干擾機偵察分選得到雷達網(wǎng)中各部雷達的脈寬、帶寬等信息,如表2所示。
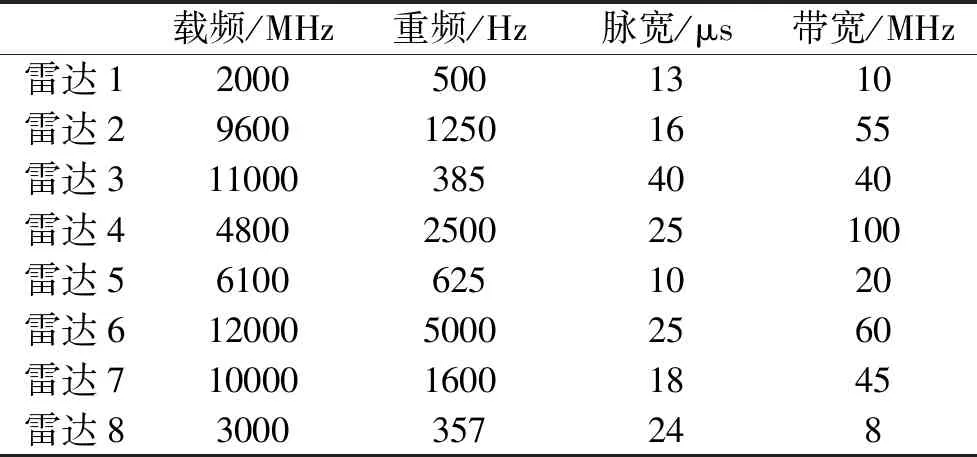
表2 雷達信息
從圖5、圖6可以看出,改進后的遺傳算法在尋優(yōu)性能上有明顯的優(yōu)化,未改進前在迭代100次之后無論種群大小為多少,算法都未能收斂,而改進后種群的收斂性都得到了保證,同時對比圖5和圖6還可以看出,改進前后的收斂速度明顯不同,這說明改進后的遺傳算法能夠同時保證收斂速度和收斂效果。在對遺傳算法進行100帶迭代后,遺傳算法最終收斂于0.721左右,這說明干擾后,雷達對目標(biāo)的發(fā)現(xiàn)概率下降了72.1%,協(xié)同干擾對雷達網(wǎng)的干擾十分有效。最優(yōu)分配矩陣如表3和表4所示。
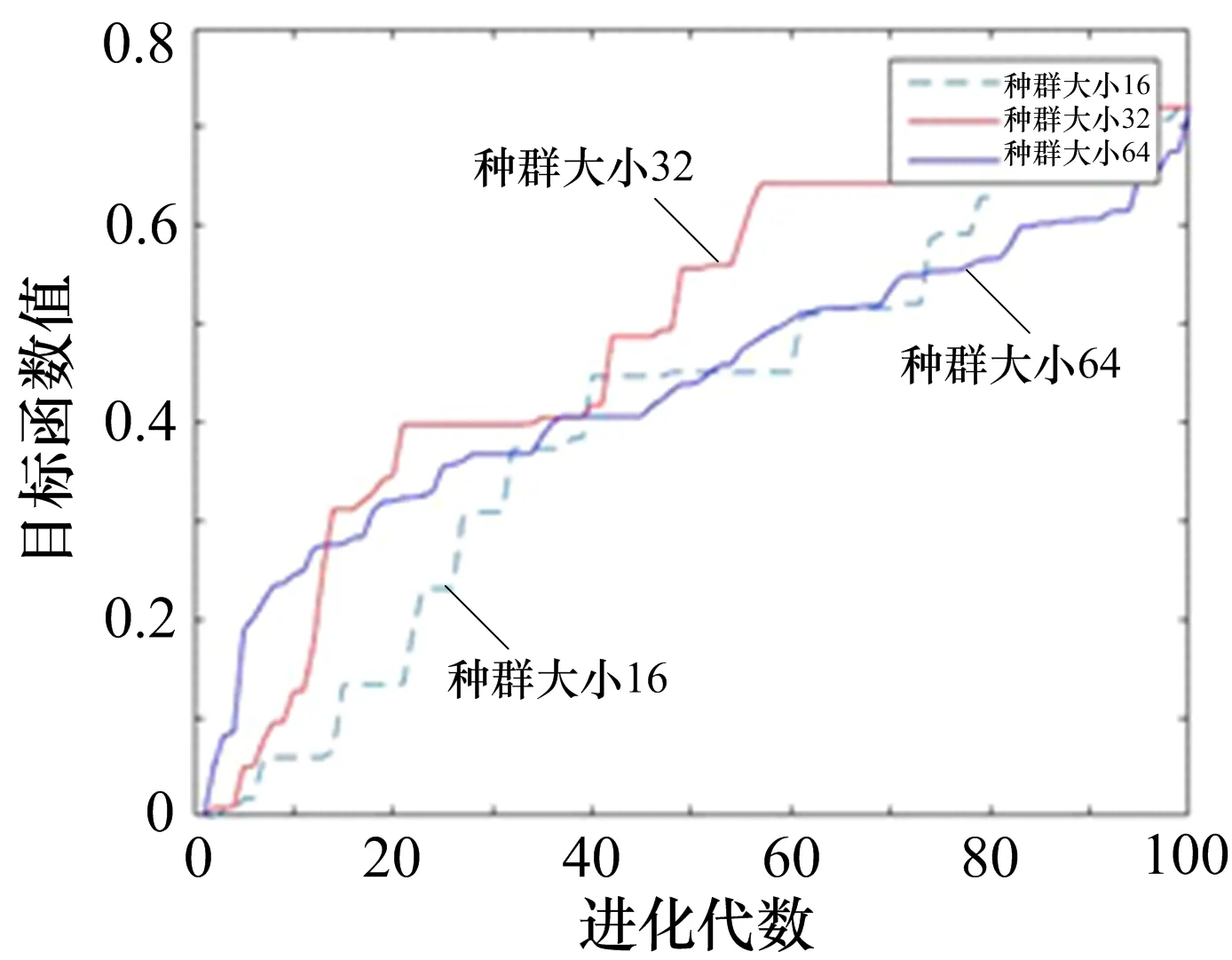
圖5 基本遺傳算法
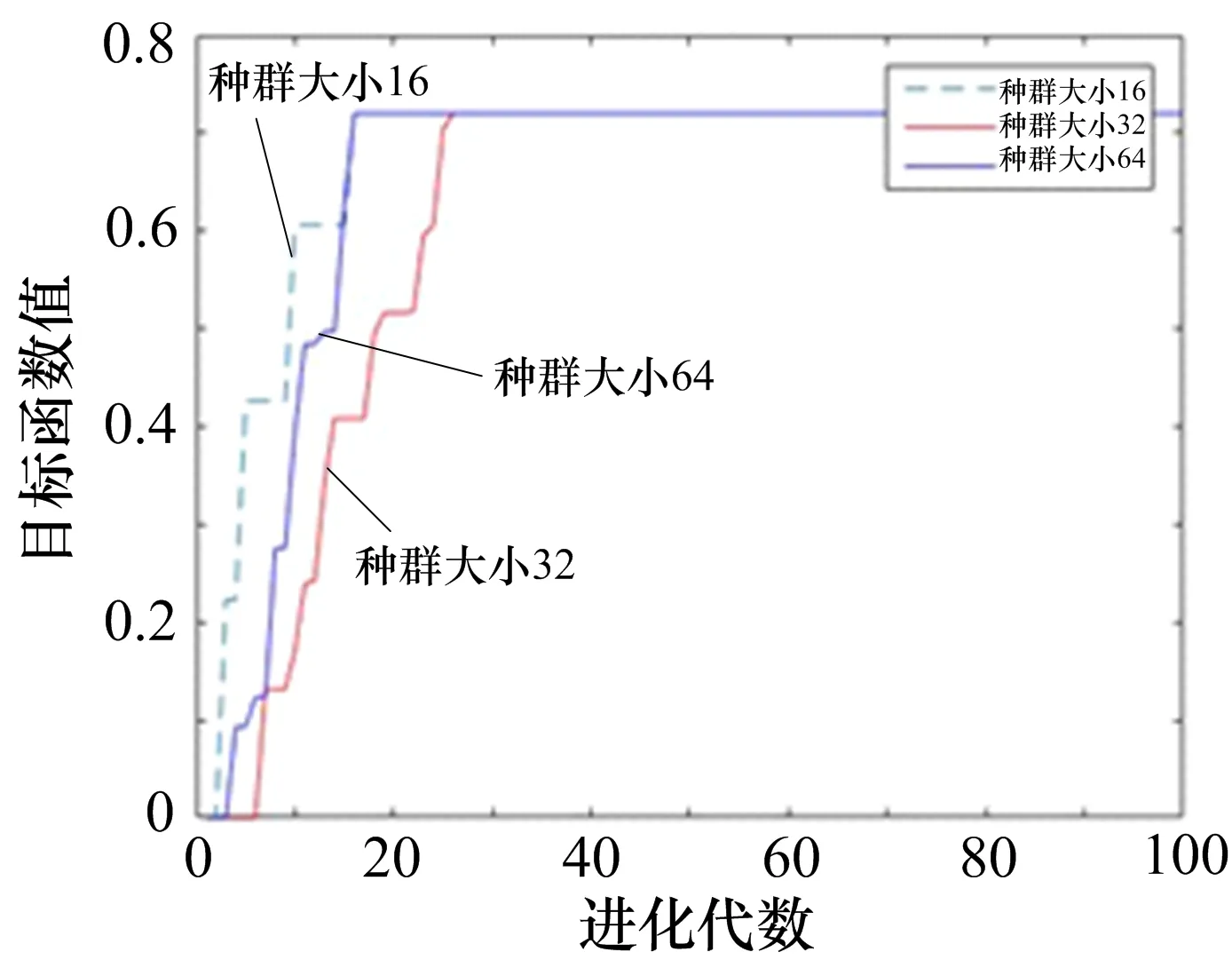
圖6 改進遺傳算法
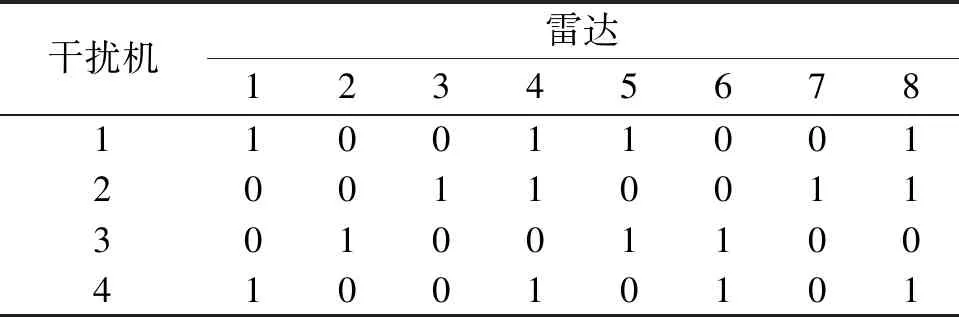
表3 最優(yōu)分配矩陣
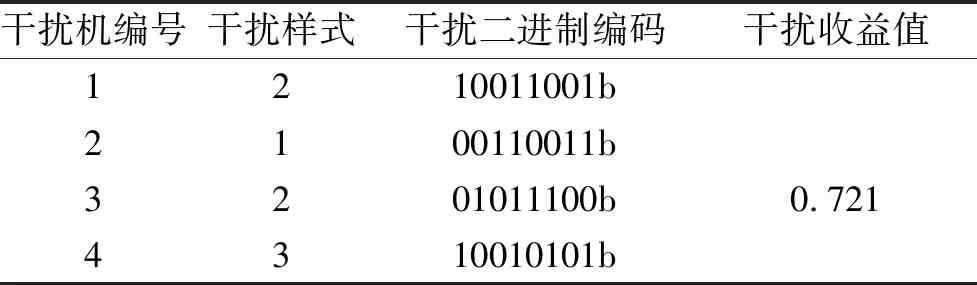
表4 最優(yōu)干擾樣式分配
表3中,0代表干擾機不對雷達進行干擾,1代表該干擾機對該雷達進行干擾。表4中,干擾樣式一欄中1、2、3分別代表壓制、欺騙和靈巧噪聲干擾。由表4可以看出,在干擾對象的分配上雷達4的分配的資源最多,雷達8其次,而雷達7由于判斷其在搜索階段的威脅程度最低,沒有對其進行任何干擾。在資源分配過程中,約束條件為每部干擾機最多只能同時干擾4部雷達,最終分配結(jié)果是滿足資源分配的約束條件的。
5 結(jié)束語
本文首先根據(jù)動態(tài)規(guī)劃算法,對協(xié)同干擾資源分配算法中存在的缺陷進行了分析,研究了協(xié)同干擾資源分配模型,并且按照雷達參數(shù)對雷達的干擾樣式進行分配;其次,針對傳統(tǒng)分配算法存在的計算量問題,將遺傳算法以及粒子群算法應(yīng)用于策略分配中,改進了上述兩種算法,針對遺傳算法的交叉和變異概率做了改進,使得智能算法在策略分配中具備了快的收斂速度,避免了陷入局部最優(yōu)解;最后,對空間場景進行了仿真,通過對算法的分析,可以提高干擾機的利用率,改進后的兩種智能算法都能使目標(biāo)函數(shù)收斂,并且將之應(yīng)用在不同階段的策略分配中,模擬雷達任務(wù)切換,可以提高干擾機的利用率,而且每次都能夠?qū)ふ业阶顑?yōu)的分配策略。
猜你喜歡
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24