波耳共振儀數(shù)據(jù)可視化與精確化探究
2019-08-06 05:36:02陳俊宇董國(guó)波劉少華李朝榮
物理實(shí)驗(yàn) 2019年7期
關(guān)鍵詞:振動(dòng)實(shí)驗(yàn)
陳俊宇,董國(guó)波,劉少華,李朝榮,李 華
(北京航空航天大學(xué) a.機(jī)械工程及自動(dòng)化學(xué)院;b.物理科學(xué)與核能工程學(xué)院;c.宇航學(xué)院,北京 100191)
波耳共振儀是用來(lái)定量研究機(jī)械振動(dòng)的儀器,利用波耳共振儀可以研究自由振動(dòng)、阻尼振動(dòng)、受迫振動(dòng)的幅頻特性和相頻特性[1-2]. 在信息時(shí)代,各類實(shí)驗(yàn)儀器朝著可視化、精確化的方向發(fā)展[3],可視化能夠直觀地讓實(shí)驗(yàn)者看到現(xiàn)象,精確化可以使更多細(xì)節(jié)在實(shí)驗(yàn)結(jié)果中展示出來(lái),因而更容易發(fā)現(xiàn)其中的規(guī)律,尤其是在波耳共振儀的實(shí)驗(yàn)中,存在混沌現(xiàn)象[4],使用振動(dòng)圖像有助于進(jìn)一步研究其中的混沌現(xiàn)象[5]. 波耳共振儀的原始數(shù)據(jù)顯示界面比較簡(jiǎn)單,只能顯示出擺輪運(yùn)動(dòng)的周期和振幅,而擺輪的實(shí)時(shí)位置信息和角速度無(wú)法測(cè)量,不能滿足進(jìn)一步研究阻尼振動(dòng)和受迫振動(dòng)的需要. 針對(duì)傳統(tǒng)波耳共振儀的不足,文獻(xiàn)[6]進(jìn)行了改進(jìn),使用了光電門和單片機(jī)采集數(shù)據(jù). 然而,由于光電門的局限性,不能實(shí)時(shí)測(cè)得擺輪的位置與速度;而且采樣頻率仍然較低,數(shù)據(jù)不夠精確. 另外,文獻(xiàn)[7-8]提出使用鼠標(biāo)貼附在擺輪表面采集數(shù)據(jù)的方法,但是鼠標(biāo)精度低,存在誤差積累,導(dǎo)致實(shí)際的平衡位置點(diǎn)在圖像上漂移,數(shù)據(jù)失真嚴(yán)重;鼠標(biāo)傳回計(jì)算機(jī)的數(shù)據(jù)只能單純記錄鼠標(biāo)軌跡,在相應(yīng)軟件中繪圖,不能導(dǎo)出數(shù)據(jù)進(jìn)行進(jìn)一步研究. 根據(jù)編碼器原理[9-10]在原有波耳共振儀的基礎(chǔ)上添加單片機(jī)和增量式光電編碼器,可以準(zhǔn)確得到擺輪實(shí)時(shí)位置信息和角速度的大小,記錄振動(dòng)信息的數(shù)據(jù)導(dǎo)出后可以進(jìn)行進(jìn)一步數(shù)據(jù)處理,從而實(shí)現(xiàn)精確化與可視化,使現(xiàn)有波耳共振儀的性能得到提升,滿足現(xiàn)代儀器的使用需求.
1 實(shí)驗(yàn)原理及裝置
波耳共振儀由電機(jī)通過連桿機(jī)構(gòu)提供受迫力,由帶鐵芯的線圈提供阻尼力,由光電門記錄振幅和周期. 原始儀器使用2個(gè)型號(hào)為GZ-6C的光電門來(lái)記錄周期和振幅,每個(gè)光電門包含1路發(fā)射器和1路接收器,發(fā)射器一側(cè)發(fā)射紅外信號(hào),接收器一側(cè)接收紅外信號(hào). 當(dāng)光電門中間沒有被遮擋時(shí),輸出高電平信號(hào);有遮擋時(shí)輸出低電平信號(hào). 擺輪邊緣有均勻分布的180個(gè)短凹槽和1個(gè)長(zhǎng)凹槽. 上方的1對(duì)發(fā)射器和接收器正對(duì)短凹槽的位置,能夠在實(shí)驗(yàn)中記錄轉(zhuǎn)過的短凹槽的個(gè)數(shù);下方的1對(duì)發(fā)射器和接收器正對(duì)長(zhǎng)凹槽的位置,能夠在實(shí)驗(yàn)中記錄長(zhǎng)凹槽經(jīng)過光電門中心位置的時(shí)間,通過2次時(shí)間做差是半個(gè)周期,乘以2倍可求出周期[11]. 在半個(gè)周期的時(shí)間內(nèi),記錄到轉(zhuǎn)過的短凹槽個(gè)數(shù)即為振幅. 原實(shí)驗(yàn)儀器只能測(cè)出振動(dòng)的周期和振幅,不能獲得某一時(shí)刻的角位移、角速度等振動(dòng)信息,存在不精確的缺點(diǎn). 另外,原有的實(shí)驗(yàn)儀器無(wú)法將完整的角位移-時(shí)間曲線呈現(xiàn)出來(lái),存在不直觀的缺點(diǎn).
改進(jìn)后的實(shí)驗(yàn)儀器使用增量式光電編碼器記錄振幅和周期,增量式光電編碼器是通過光電轉(zhuǎn)換原理將輸出軸的角位移量轉(zhuǎn)換為脈沖的傳感器. 碼盤與擺輪同軸致使擺輪的旋轉(zhuǎn)帶動(dòng)碼盤旋轉(zhuǎn),當(dāng)光電編碼器的軸轉(zhuǎn)動(dòng)時(shí),2個(gè)光電檢測(cè)裝置A和B產(chǎn)生脈沖輸出,兩相脈沖相差90°相位角. 比較兩相脈沖的相位可判斷轉(zhuǎn)向(如果A相脈沖比B相脈沖超前,則光電編碼器為正轉(zhuǎn),否則為反轉(zhuǎn));記錄輸出脈沖的個(gè)數(shù)可換算成轉(zhuǎn)過的角度[12-13]. 增量式光電編碼器精度高,集成度高,受外界干擾小,輸出穩(wěn)定. 實(shí)驗(yàn)中使用的光電編碼器型號(hào)為OMRON E6B2-CWZ3E,精度為1 000線,即轉(zhuǎn)1周時(shí)單相輸出1 000個(gè)上升沿.
使用STM32F103作為嵌入式控制器. 該單片機(jī)的定時(shí)器含有編碼器模式[14],能對(duì)輸入信號(hào)進(jìn)行濾波,從而穩(wěn)定計(jì)數(shù). 在該模式下,單片機(jī)將編碼器返回的脈沖信息進(jìn)行硬件四倍頻,即編碼器轉(zhuǎn)1周單片機(jī)會(huì)讀取4 000個(gè)跳變沿. 而對(duì)于原始儀器,擺輪轉(zhuǎn)1周,讀取振幅的光電門僅產(chǎn)生360個(gè)跳變沿,相比于原儀器,改進(jìn)后的測(cè)量精度提升約為11倍(4 000/360).
記錄擺輪的實(shí)時(shí)位置采用了變M法測(cè)速的方法[15]. 在實(shí)驗(yàn)開始前將記錄脈沖數(shù)的寄存器清零. 實(shí)驗(yàn)時(shí)使用定時(shí)器中斷,每隔10 ms記錄讀取到的脈沖數(shù),利用脈沖數(shù)與角度的對(duì)應(yīng)關(guān)系,將脈沖數(shù)換算成角度后通過串口輸出到計(jì)算機(jī),然后將記錄脈沖數(shù)的寄存器清零.
編碼器與擺輪同心安裝,如圖1所示. 在擺輪軸承處原本有1個(gè)擋片,通過3顆螺釘與擺輪連接. 拆下?lián)跗螅瑩Q上3D打印的連接件,該連接件與原來(lái)的擋片相比多1根軸,可以通過聯(lián)軸器將這個(gè)軸與編碼器軸相連. 使用激光切割機(jī)對(duì)
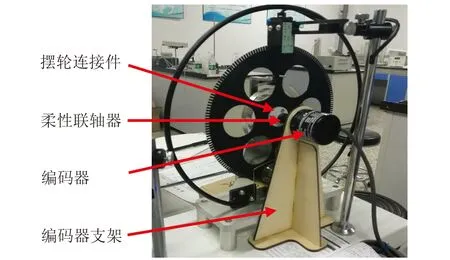
圖1 編碼器安裝
椴木層板進(jìn)行加工,經(jīng)插接和粘接后制成編碼器支架,使用螺釘將編碼器與支架相連.
編碼器輸出的AB兩相分別與TIM5的通道1和通道2相連,使用編碼器模式. 單片機(jī)與電腦相連,通過串口傳輸數(shù)據(jù).
2 實(shí)驗(yàn)結(jié)果
2.1 曲線繪制
單片機(jī)每隔10 ms實(shí)時(shí)地向電腦返回?cái)[輪的位置和時(shí)間信息,計(jì)算機(jī)通過SerialChart軟件進(jìn)行處理,可以繪制出實(shí)時(shí)的角位移-時(shí)間曲線. 將接收到的數(shù)據(jù)導(dǎo)入Excel中,可以精確地繪制多種圖像.
圖2~4為3種阻尼下阻尼振動(dòng)振幅θ-時(shí)間t曲線,圖5為阻尼1擋條件擬合曲線局部. 可以直觀地看到,隨著阻尼1,2和3擋遞增,振動(dòng)的總時(shí)間依次遞減.
振動(dòng)曲線的細(xì)節(jié)對(duì)比如圖6所示. 如果不使用編碼器,就不能精確記錄振動(dòng)信息,這種細(xì)微的差異很難在實(shí)驗(yàn)中直觀感受到.
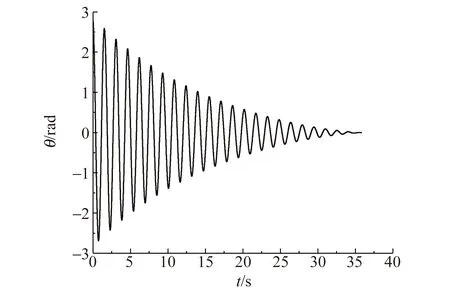
圖2 阻尼1擋條件擬合曲線
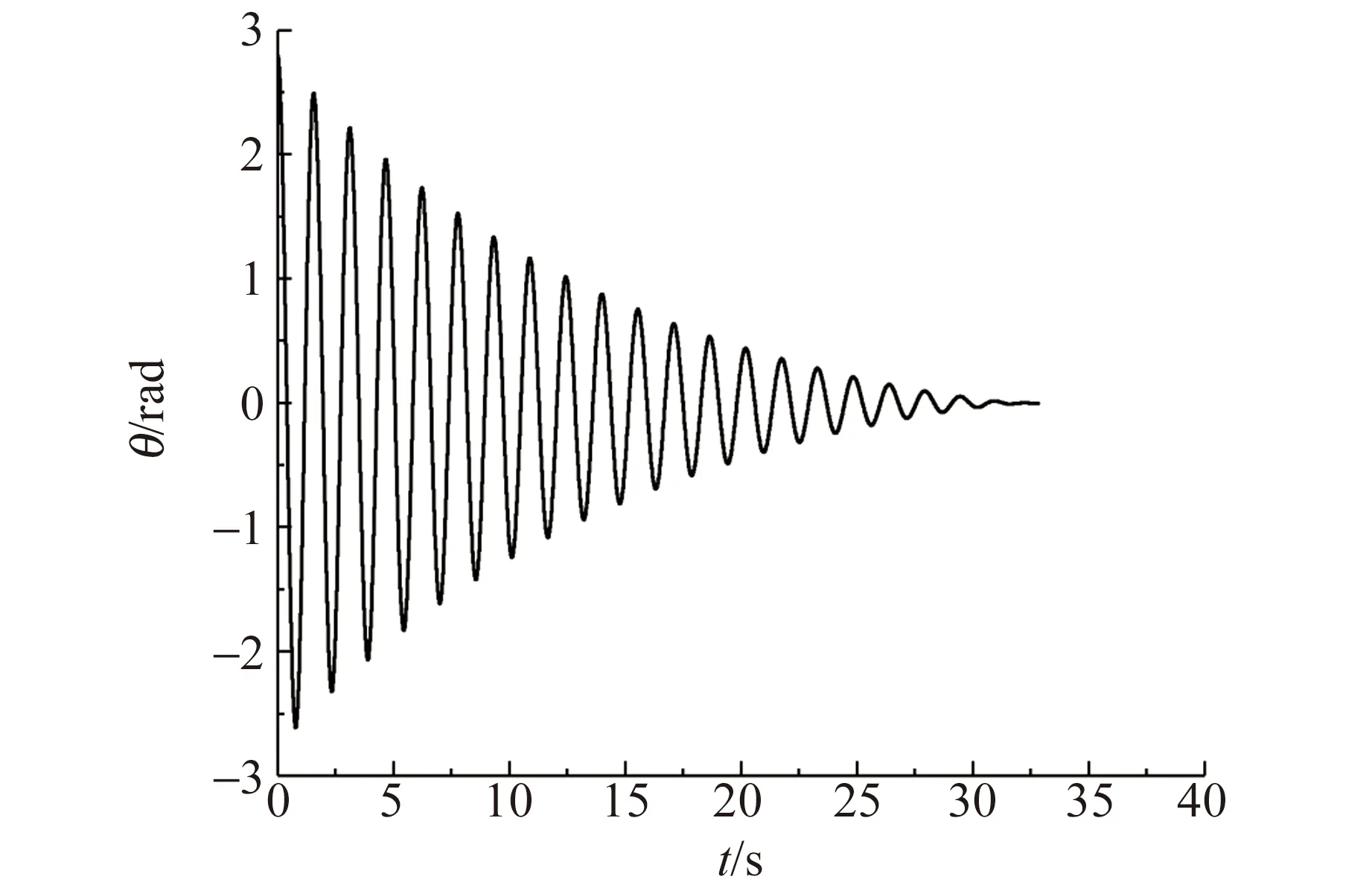
圖3 阻尼2擋條件擬合曲線
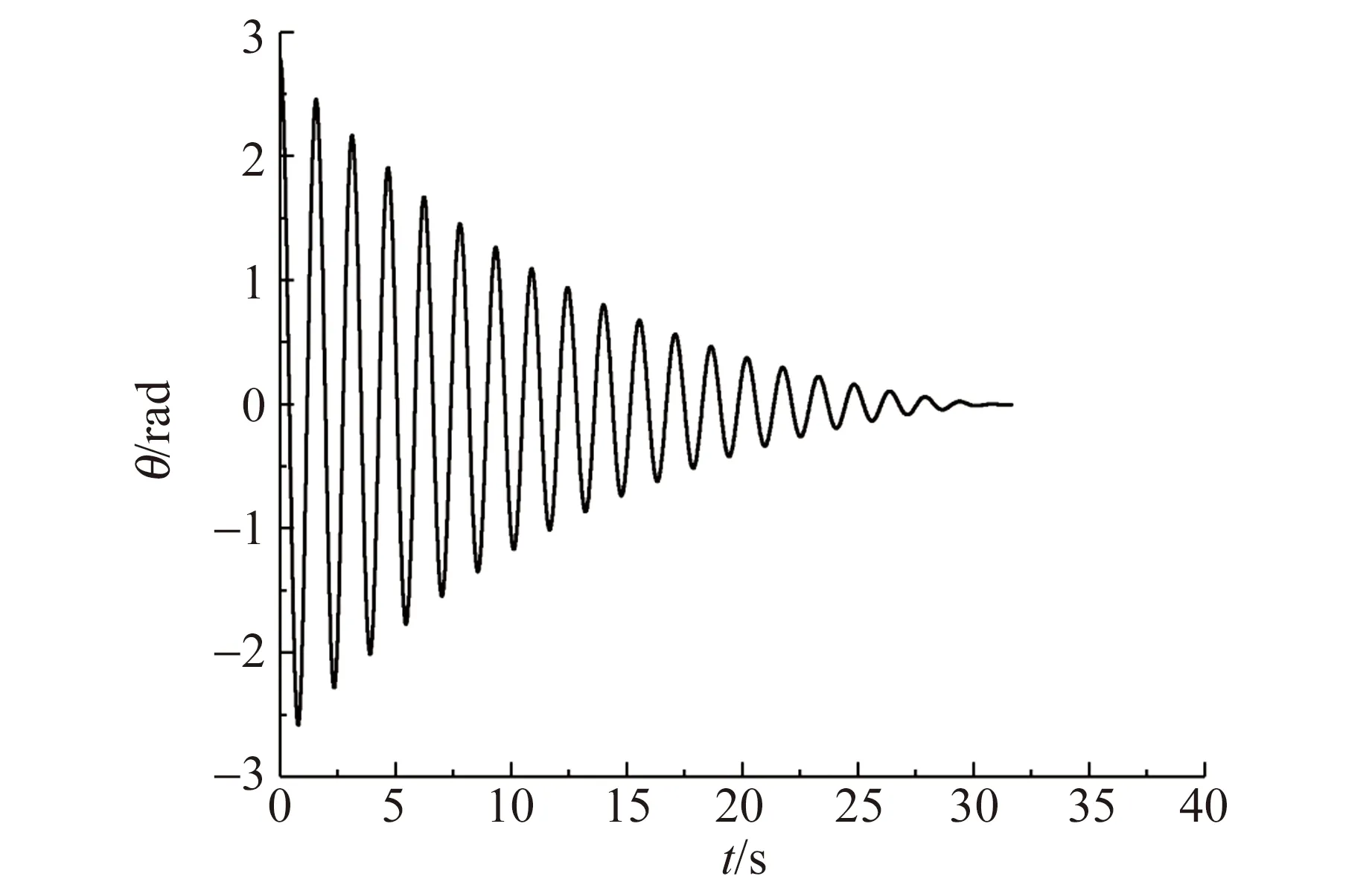
圖4 阻尼3擋條件擬合曲線
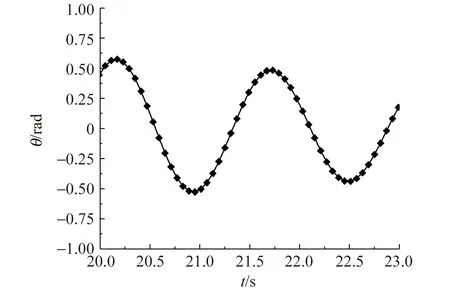
圖5 阻尼1擋條件擬合曲線局部
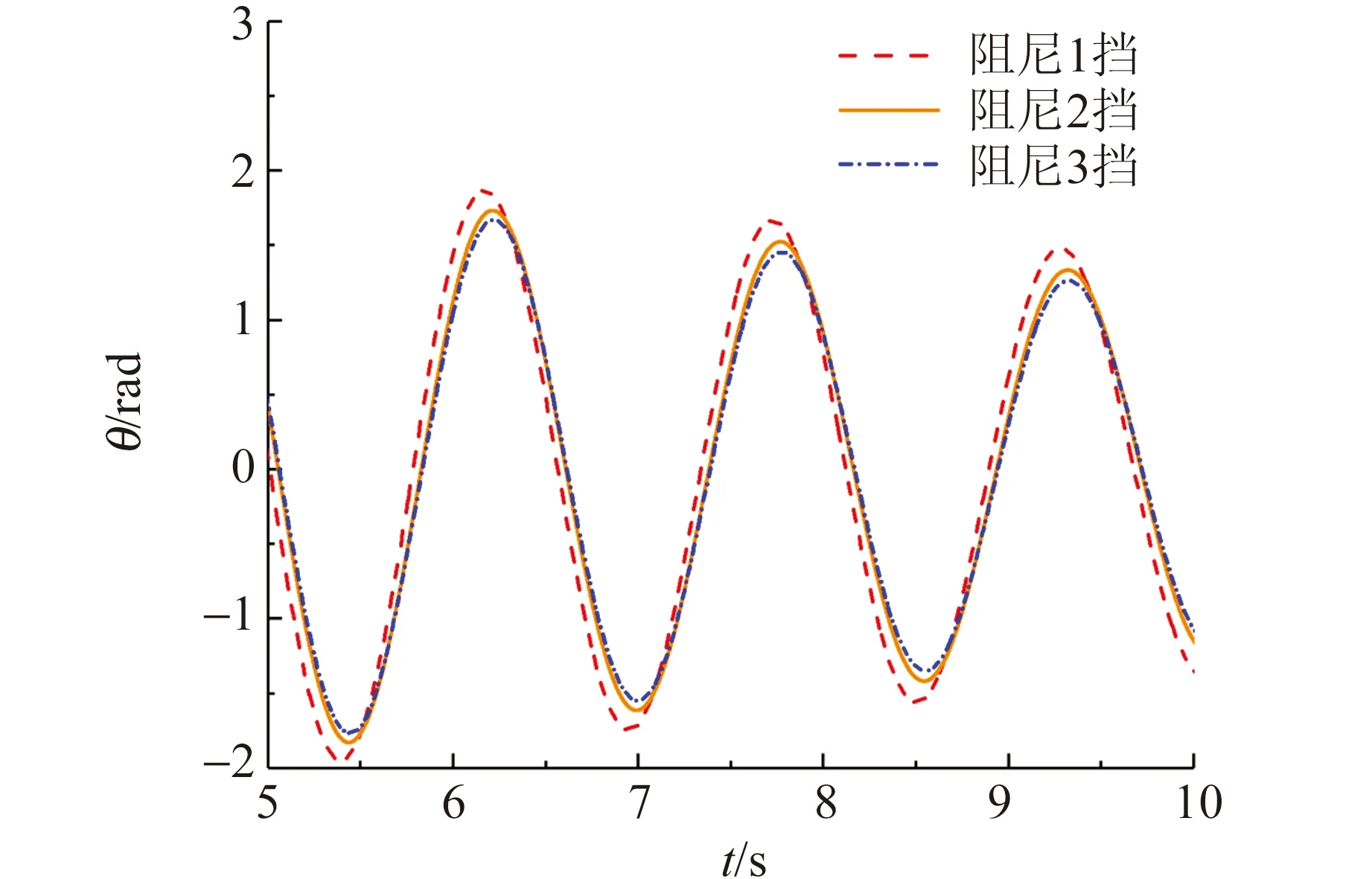
圖6 不同阻尼條件下阻尼振動(dòng)振幅-時(shí)間曲線對(duì)比(局部)
用相鄰時(shí)間間隔測(cè)得的角位移之差除以單位時(shí)間(10 ms),可以得到角速度. 以擺輪擺動(dòng)角度θ為橫軸,擺輪擺動(dòng)角速度ω為縱軸,繪制出振動(dòng)相圖,可以用于研究混沌現(xiàn)象.
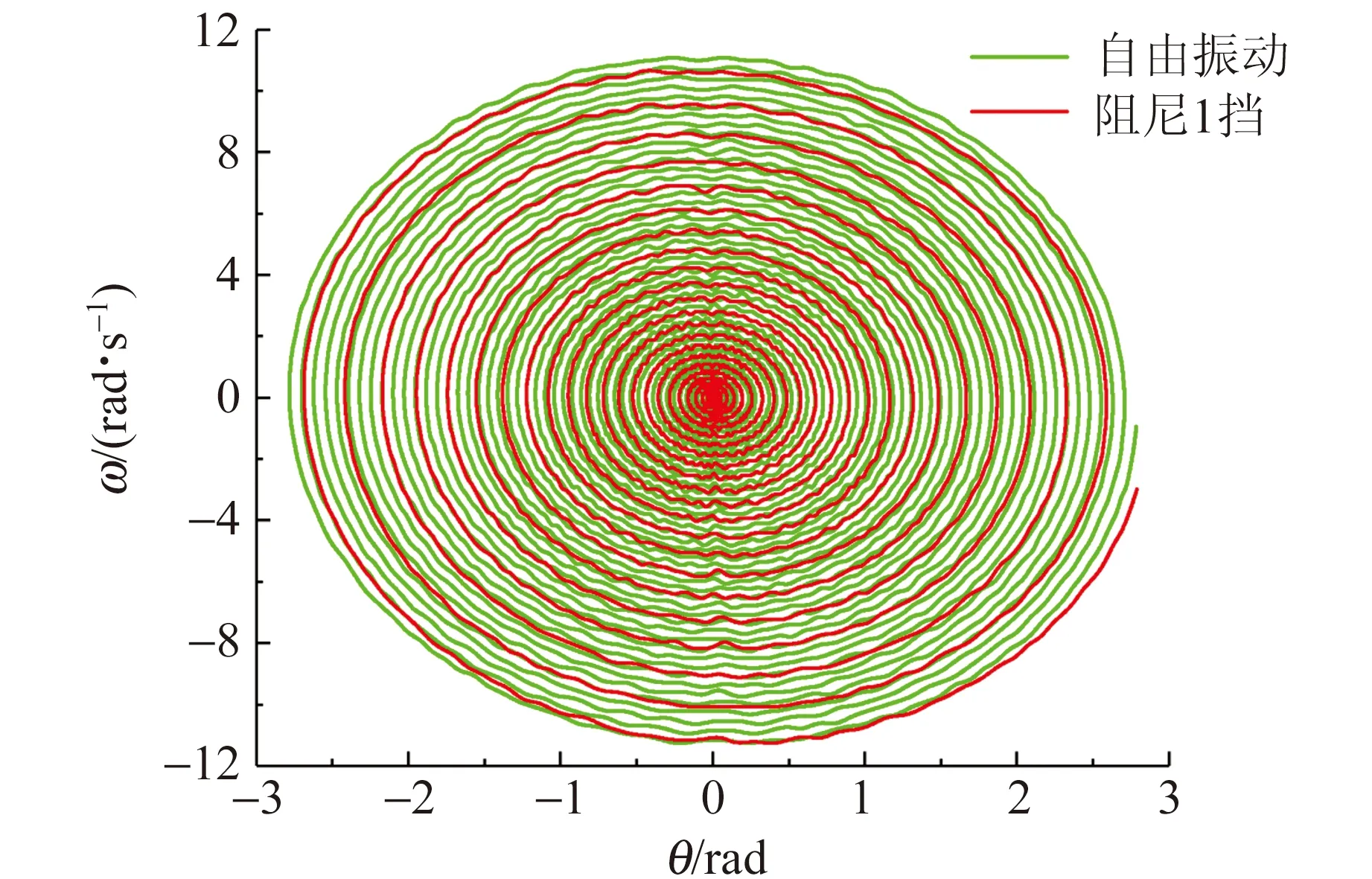
圖7 自由振動(dòng)和阻尼1擋時(shí)的振動(dòng)相圖
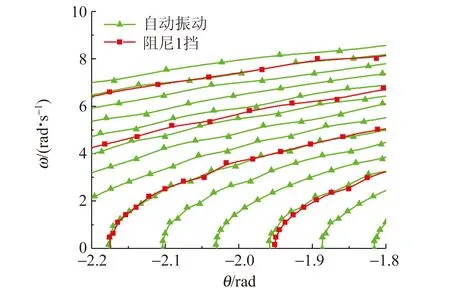
圖8 自由振動(dòng)和阻尼1擋時(shí)的振動(dòng)相圖(局部)
圖7和圖8比較了自由振動(dòng)和1擋阻尼時(shí)的振動(dòng)相圖,二者最終都收斂于角位移為0、角速度為0的點(diǎn),說(shuō)明這點(diǎn)處于振動(dòng)的平衡狀態(tài). 自由振動(dòng)相圖較密而阻尼振動(dòng)相圖較疏,說(shuō)明阻尼振動(dòng)更快趨向于平衡.
2.2 效果分析
相比于原始的波耳共振儀只能測(cè)量周期和振幅,使用編碼器改進(jìn)后,不僅能測(cè)量周期和振幅,還可以測(cè)量位置與速度信息,繪制實(shí)時(shí)的振動(dòng)曲線,使數(shù)據(jù)呈現(xiàn)方式更加直觀,有助于對(duì)振動(dòng)的理解. 原始波耳共振儀的分辨率是360°/360=1°,而使用編碼器改進(jìn)后分辨率提升為360°/4 000=0.09°,數(shù)據(jù)更加精確. 此外,改進(jìn)所用的費(fèi)用低廉,可以取代原始儀器機(jī)箱中測(cè)量周期和振幅的部分.
3 編碼器外部引入阻尼的影響分析
為了分析編碼器引入的外部阻尼對(duì)于阻尼系數(shù)的影響,不妨假設(shè)編碼器所引入的阻尼類似于儀器自帶的電磁阻尼(阻尼與角速度成正比). 分別測(cè)量并計(jì)算無(wú)編碼器和有編碼器2種條件下的擺輪做系列阻尼振動(dòng)和自由振動(dòng)時(shí)的阻尼系數(shù).
當(dāng)擺輪在有摩擦阻尼和電磁阻尼的媒質(zhì)中運(yùn)動(dòng)時(shí),其運(yùn)動(dòng)方程為[16-17]
(1)
(2)
當(dāng)mcos (ωt)=0時(shí),式(2)即為阻尼振動(dòng)方程. 當(dāng)β=0即在無(wú)阻尼情況時(shí),式(2)變?yōu)楹?jiǎn)諧運(yùn)動(dòng)方程,系統(tǒng)的固有頻率為ω0. 式(2)的通解為
θ=θ0e-β tcos (ω0t+α),
(3)
設(shè)t1時(shí)刻
cos (ωt1+α)=1,
(4)
記
θ1=θ0e-β t1.
(5)
設(shè)tn時(shí)刻
cos [ω(t1+nT)+α]=1,
(6)
記
θn=θ0e-β tn=θ0e-β(t1+nT).
(7)
由式(5)與式(7)得
(8)
等式兩邊取對(duì)數(shù)得
(9)
取5組數(shù)據(jù)進(jìn)行逐差法計(jì)算:
(10)
(11)
多組實(shí)驗(yàn)結(jié)果求取平均值得到最終表數(shù)阻尼系數(shù)的表達(dá)式為
(12)
代入測(cè)得的數(shù)值計(jì)算可得表1中各種情況下的阻尼系數(shù).
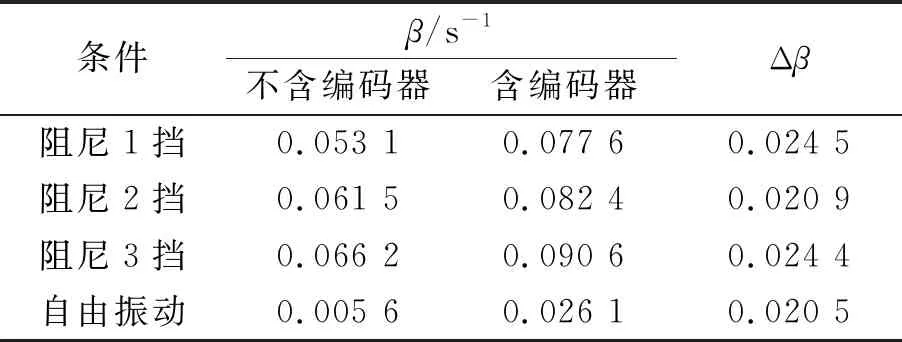
表1 編碼器引入的阻尼

定量計(jì)算出的編碼器阻尼系數(shù)雖然小于1擋電磁阻尼,相比于系統(tǒng)固有阻尼系數(shù)而言較大,因此不能忽略. 但添加編碼器后對(duì)受迫振動(dòng)及阻尼振動(dòng)的觀察不產(chǎn)生影響. 在研究阻尼振動(dòng)和受迫振動(dòng)時(shí),應(yīng)該使用由固有阻尼、電磁阻尼和編碼器阻尼之和作為總的阻尼系數(shù)進(jìn)行計(jì)算.
4 結(jié)束語(yǔ)
經(jīng)過理論分析及實(shí)驗(yàn)驗(yàn)證可知,通過光電編碼器和STM32單片機(jī)測(cè)量波耳共振儀的實(shí)時(shí)角位移時(shí),分辨率和功能相比于原始儀器均顯著提升,該方案可以將數(shù)據(jù)實(shí)時(shí)呈現(xiàn)在電腦上,有助于學(xué)生對(duì)機(jī)械振動(dòng)有更直觀的認(rèn)識(shí). 基于光電編碼器的改進(jìn)方案有能夠獲得大量實(shí)驗(yàn)數(shù)據(jù)的優(yōu)勢(shì),可進(jìn)行波耳共振儀基礎(chǔ)實(shí)驗(yàn)驗(yàn)證以及混沌現(xiàn)象的探究. 借助于0.01 s的采樣頻率所獲得的數(shù)據(jù),可以方便地繪制角位移-時(shí)間曲線,由于數(shù)據(jù)采集的時(shí)間間隔很小,數(shù)據(jù)點(diǎn)擬合出的曲線精度很高;通過對(duì)等時(shí)間間隔采集到的角速度數(shù)據(jù)進(jìn)行差分運(yùn)算,可以得到某一時(shí)間所對(duì)應(yīng)的擺輪角速度值,進(jìn)而可以繪制出振動(dòng)相圖. 所以,使用光電編碼器改進(jìn)儀器后,使利用大量數(shù)據(jù)繪制圖像來(lái)研究混沌現(xiàn)象成為可能,對(duì)振動(dòng)的研究很有幫助.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55