基于慣性基準法的軌道短波不平順檢測系統
2019-07-25 00:37:38李浩然侯智雄劉伶萍魏世斌
鐵道建筑 2019年6期
李浩然,侯智雄,劉伶萍,魏世斌
(1.中國鐵道科學研究院 研究生部,北京 100081;2.中國鐵道科學研究院集團有限公司 基礎設施檢測研究所,北京 100081)
軌道不平順是指軌道的幾何形狀、尺寸及空間位置相對其理想狀態和標準位置的偏差[1]。軌道不平順是列車振動的主要原因,可能會增大輪軌動力響應,加速列車及軌道部件的損壞,增加工務部門的養護和維修成本[2];另一方面,由于軌道不平順引起的列車高頻振動可能降低乘坐舒適度,嚴重時甚至可能危及行車安全[3]。軌道不平順按照波長通常可分為小于3 m 的短波不平順、3~30 m的中波不平順及大于30 m的長波不平順[4]。短波不平順是軌道不平順的一種重要表現形式,分布廣,發展快,危害大[5],因此,必須在早期就對短波不平順加以檢測和防治。
短波不平順的檢測方法主要分為弦測法、軸箱加速度積分法和慣性基準法。弦測法是以鋼軌上首尾2個檢測點的連線作為測量弦,中間檢測點到該弦的正矢作為短波不平順的測量值。基于弦測法的測量不受低速限制,但弦測法的傳遞函數在0~2不斷變化,并不恒為1,因此測量結果不能準確地反映軌道短波不平順的真實狀況[6]。軸箱加速度積分法采用測量軸箱加速度值并經過2次積分的方法計算短波不平順,這種方法設備結構簡單,易于實現,但軸箱加速度動態變化范圍較大,傳感器很難滿足分辨率及精度要求,因此檢測精度不夠高[7]。慣性基準法利用加速度計和位移計協同工作的方法檢測短波不平順,其傳遞函數理論上恒為1,可以檢測任何波長的軌道不平順,且加速度經過彈簧系統減振,動態變化范圍大大減小,能夠得到較高的檢測精度[8]。
本文介紹的短波不平順檢測系統其傳感器安裝在車輛的轉向架構架上,因此稱為構架式短波不平順檢測系統。構架式短波不平順檢測系統基于慣性基準法,在車輛運行過程中對轉向架上的加速度信號及位移信號進行處理和分析,獲得代表短波不平順狀況的幾何參數。
1 檢測原理
慣性基準法原理如圖1所示,其中M為質量塊,A為加速度計,D為位移計,K為彈簧,C為阻尼,R為車輪半徑。設Y為軌道短波不平順值,Z為質量塊M相對慣性基準線的位移,W為質量塊M相對軸箱的位移。由圖1可知短波不平順值Y可表示為
Y=Z-W-R
(1)

圖1 慣性基準法原理示意
位移Z可通過加速度計的輸出值a經過2次積分計算得到,位移W可通過位移計測得,則短波不平順值Y可以進一步寫為

(2)
2 檢測系統設計
2.1 系統框架設計
構架式短波不平順檢測系統主要由傳感器、前置預處理模塊、實時采集計算機、數據處理計算機等構成。
前置預處理模塊對加速度計及位移計采集的原始信號進行放大和模擬濾波處理;實時采集計算機對輸入的模擬信號進行A/D模數變換、存儲、數字補償濾波;高通濾波器截取檢測范圍波長,經過綜合運算合成短波不平順幾何參數;數據處理計算機將幾何參數存入數據庫,生成超限報表,輸出波形圖;網絡打印機打印超限報表和波形圖。構架式短波不平順檢測系統的數據處理流程如圖2所示。
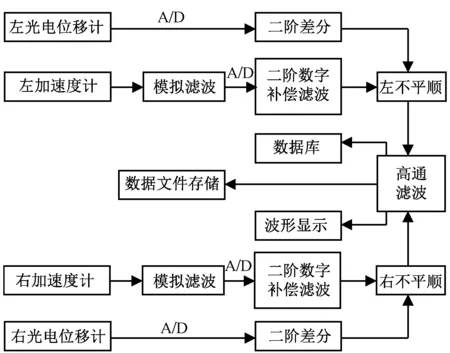
圖2 數據處理流程
2.2 機械部件設計
構架式短波不平順檢測系統采用了新型的機械部件設計,如圖3所示。在轉向架側壁焊接固定支座;通過加速度計和位移計安裝支座分別在左右轉向架上固定傳感器;在軸箱上安裝反光板支座,在支座上安裝高程可微調的反光板。

圖3 機械部件設計
2.3 濾波器設計
2.3.1 模擬濾波器
構架式短波不平順檢測系統采用二階模擬低通濾波器對加速度信號進行抗混疊處理,濾除加速度信號中的高頻干擾成分,其系統函數F(s)的表達式為
(3)
式中:s為時域內拉普拉斯算子;Ω2為時域角頻率。
二階模擬低通濾波器的Ω2是由電路參數決定的,因此可根據短波不平順檢測的特點,選定合適的電路參數確定Ω2,得到所需截止頻率的二階模擬低通濾波器,其幅頻特性如圖4所示。
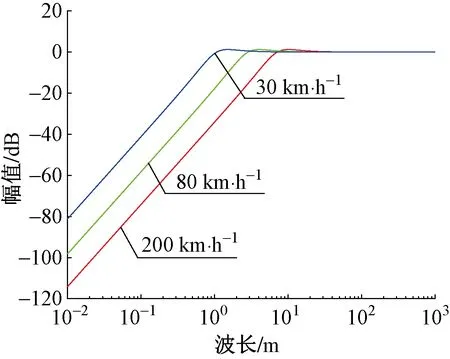
圖4 二階模擬低通濾波器幅頻特性
2.3.2 數字補償濾波器
由圖4可知,該二階模擬低通濾波器的幅頻特性隨著列車速度的變化而改變,即在空間域是移變的。為了得到與列車速度無關的傳遞特性,需要設計1個二階去移變數字補償濾波器,去除二階模擬低通濾波器幅頻特性的移變特性。
根據幅頻特性、采樣時間及舍入誤差的影響,結合模擬域與數字域頻率的映射關系,應用時間域與空間域頻率轉換關系,通過數學計算得到二階數字補償濾波器[9],其系統函數G(z)的表達式為
(4)

二階模擬低通濾波器與二階數字補償濾波器級聯得到二階混合濾波器。采樣間隔取0.01 m,二階混合濾波器的幅頻特性如圖5所示,其截止波長為0.03 m。

圖5 二階混合濾波器幅頻特性
2.3.3 高通濾波器
高通濾波器的功能是從不平順檢測值中濾除大于某一波長的長波成分,截取檢測范圍內有效波長,確保檢測精度。
根據構架式短波不平順檢測系統的需求,采用了1個基窗和2個修正窗并聯形式的高通濾波器。基窗采用1個三角窗,修正窗其中一個為三角窗,另一個由2個矩形窗并聯[10]。該高通濾波器的系統函數U(z)的表達式為
式中:k,l,m,n為窗函數的窗長,決定了濾波器的截止波長和濾波特性;a′,b′,c′為比例系數,合理設置比例系數可使得濾波器的積分平方誤差最小,優化濾波特性。

圖6 高通濾波器幅頻特性
根據構架式短波不平順檢測系統的要求,合理設置濾波器窗長和比例系數。由高通濾波器幅頻特性(圖6)可知,該高通濾波器的截止波長為3 m,通帶內平坦,幅值增益波動較小,大于3 m的波長其幅值迅速衰減,過渡帶陡峭,濾波特性優良。與二階混合濾波器相結合,可知該構架式短波不平順檢測系統的波長檢測范圍為0.03~3 m。
3 系統應用
在實時操作系統下編程,以實現各濾波算法及各功能模塊,并通過系統調試使構架式短波不平順檢測系統達到檢測要求。
將該系統安裝在一地鐵軌檢車上進行數據采集,通過實時操作系統處理可得到短波不平順波形。圖7是檢測過程中隨機截取的一段波形,其中LBM,LRMS,LACC,LPDT,Speed分別表示短波不平順值、均方根值、加速度值、位移計值、檢測速度。在現場使用平直尺進行靜態復核,復核結果與軌檢車動態測試結果吻合度較好,表明該系統能夠正確反映軌道短波不平順的實際狀況。

圖7 短波不平順波形
根據設定的閾值,對構架式短波不平順檢測系統得到的短波不平順波形數據進行超限判斷,得到超限數據并發送到數據庫,對超限數據可進行編輯、報表統計、公里小結及區段總結。
4 結語
基于慣性基準法設計構架式短波不平順檢測系統新型機械部件,并選擇合適的濾波器,可以滿足波長范圍0.03~3.00 m的短波不平順檢測。該系統結構簡單,穩定可靠,實用性強。在一地鐵軌檢車上安裝使用該系統,檢測結果表明,該系統動態測試結果與現場靜態復核結果吻合度較好,能夠正確反映軌道短波不平順的實際狀況,可為軌道維修提供科學的依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
