基于GDF的結構載荷及參數聯合識別的實時方法
2019-07-24 02:09:04萬志敏陸瓊曄
振動與沖擊 2019年13期
萬志敏, 王 婷, 李 霖, 陸瓊曄
(1.南通職業大學 汽車與交通工程學院,江蘇 南通 226007;2.南通職業大學 機械工程學院,江蘇 南通 226007;3.華中科技大學 機械科學與工程學院,武漢 430074)
在許多實際工程問題中,精確地掌握作用于結構上的外載荷及參數[1-6]對結構優化設計、響應重構、故障診斷以及健康監測等起著非常重要的作用。然而,現實情況下,載荷很難測量出來,而結構參數往往也是未知的。那么,結構載荷和參數的聯合識別已成為當今結構動力學領域的研究熱點。
Yang等[7]提出了基于擴展卡爾曼濾波(Extended Kalman Fiter,EKF)的EKF-UI法來連續識別載荷及參數。最近Lei等[8]采用最小二乘法推導出了EKF-UI,并指出傳統的EKF-UI的推導方法過于繁瑣。另外,Lei等[9]還采用簡化版的EKF-UI法來識別非線性結構系統的參數。Naets等[10]基于增廣卡爾曼濾波(KF)提出了A-DEKF(Dual Extended Kalman Fiter)法來識別狀態/載荷/參數,核心思想是將狀態/載荷/參數作成增廣狀態,進而采用KF法來識別增廣狀態。不過,該方法需要一個合適的未知載荷方差估計,該方差估計對算法的穩定性影響很大。作者最近也基于GDF法提出了擴展GDF法(EGDF)來連續識別載荷和參數,其思想是利用EKF的非線性系統一階線性化[11]。不過,EGDF存在兩個主要的問題,一是需要已知未知載荷自由度上的加速度響應;二是僅采用加速度響應識別,會產生位移、載荷識別的低頻漂移現象,這是因為加速度和位移響應分別包含了高低頻振動特性。
本文針對上述兩個缺點,來改進EGDF法。首先,基于模態空間將笛卡爾坐標轉換到模態坐標,那么動力學問題則變為識別模態位移以及模態載荷。然后,基于模態縮減法來降低整個系統的維數,從而提高計算效率,便于實時識別。最后,再融合個別位移響應來與部分加速度響應共同識別系統,可以避免識別的位移和載荷出現低頻漂移現象。數值算例分別采用桁架以及單層浮筏為對象,來驗證本文方法的有效性。
1 EGDF法回顧
對于線性時不變動態系統,其離散狀態空間方程可以表示為
(1)


zk+1=fk(zk,uk)+wkk=1,2,…,T
(2)
yk=hk(zk)+Dkuk+vkk=1,2,…,T
(3)
式中:下標k為t=(k+1)Δt時刻;Δt為采樣時間間隔;f(·)和h(·)為非線性函數;另外,wk和vk分別為系統噪聲和觀測噪聲,他們通常被假設為互不相關、均值為零,方差分別為Gk、Rk。

在上述條件下,可以得到連續識別載荷和增廣狀態的EGDF算法,主要包含三步:
(1) 載荷識別步
(4)
(5)
(6)
(7)
(2) 測量更新步
(8)
(9)
(10)
(11)
(3) 時間更新步
(12)
(13)
(14)
(15)
(16)
顯然,EGDF法是借助于EKF一階線性化的思想,如果狀態傳遞及觀測方程皆為線性方程,則上述EGDF法退化為GDF法。
2 位移及加速度融合下的EGDF法
工程實際中,采用加速度傳感器來測量振動響應的應用更為廣泛。然而,采用部分加速度響應來識別系統的GDF算法具有本征的不穩定性,它會給識別位移及載荷值帶來所謂的虛假低頻漂移現象。導致該現象的原因是因為加速度信號對于輸入載荷的準靜態分量不靈敏[12]。盡管正則化的方法以及一些信號后處理方法可以解決該問題,但是這些方法都不適合載荷、參數的實時反演。本文采用個別位移響應加上部分加速度響應信號來共同識別未知載荷和增廣狀態。這是因為加速度信號和位移信號分別包含了高、低頻振動特性。那么,加速度及位移數據融合下的測量響應應包含在式(3)中的yk中,這就導致了式中hk(zk)及Dk發生改變。
3 模態EGDF法
增廣狀態向量的維數為2n+a(a為未知參數的數目),而EGDF法的計算階數為(2n+a)3,那么即使是針對一個簡單結構的識別也將會消耗很大的計算資源。本文采用模態縮減法來拓展EGDF法,即使用較低的幾階主導模態即可識別結構載荷和參數,使得EGDF法更具工程實用性。引入模態坐標變換,
p(t)=Φq(t)
(17)

(18)

(19)
γi=2ζiωi
(20)
式中:γi為第i階模態阻尼,其中ζi是第i階模態阻尼率。
fc(z(t),u(t))
(21)
觀測方程同樣可用增廣模態狀態向量表示為
(22)
其中
(23)
D=ΦsΦTBu
(24)
式中:Φs為s個測量響應對應的振型系數矩陣,可以看出D矩陣為可逆矩陣。
將模態狀態傳遞方程式(21)離散線性化,可得
(25)
其中

(26)
(1) 特征值靈敏度矩陣
(27)
其中
(28)
(2) 特征向量靈敏度矩陣
(29)
式中,第i階特征向量的靈敏度可以由下式計算
(30)
系數Cij為
(31)
(32)
(33)
由式(33)可知,當ζ是其中的未知參數時,有
(34)
當ζ不是未知參數時,有
(35)
另外,可得靈敏度矩陣
(36)

(37)
采用“2”節中的位移、加速度融合響應來識別,那么綜上所述,結合模態變換法即可得EGDF的模態形式,為了提高計算效率,僅需取結構的前r階主導模態,而忽略后面n-r階模態即可。
(38)
4 數值分析

u1=40sin(24πt)+40sin(48πt)
(39)
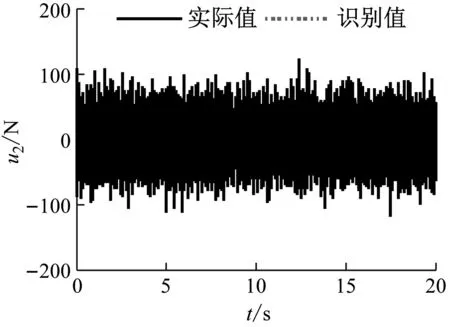
載荷u2為隨機激勵載荷。

(a) 桁架結構

(b) 桁架有限元模型和傳感器布置
假設桿單元5、7、10、14、15和17的剛度是未知的,初始值為759.5 N/m、633.0 N/m、1 342.5 N/m、1 163.5 N/m、759.5 N/m、633.0 N/m。通常,采用的模態數越多,識別的參數結果越準確,但是計算量也隨之變大。本文的模態EGDF法僅采用前5階主導模態來識別。
首先,僅采用7個加速度測量響應來識別未知載荷、狀態以及參數,它們分別是節點2、3、5、7、8、10的加速度響應,不同于EGDF法,模態EGDF法無需載荷位置自由度的加速度測量響應信號。5%的環境噪聲加在了測量響應中。圖2~圖3是載荷的識別圖,由圖可知,識別值出現了漂移現象,且相對誤差達到10.23%。另外,所有的位移和速度都被識別,其中圖4展示了節點7的位移及速度識別值,由圖4可知,速度值識別的結果很好,但是位移值不出意外的也出現了低頻漂移現象。
為了解決上述的漂移現象,個別測量位移也用來和上述加速度測量響應一起來反演未知載荷、狀態及參數,此時節點3和節點10的豎直位移是增加的測量響應。圖5~圖7分別展示了載荷、位移和速度識別值(其中載荷識別值的相對誤差減小到3.68%),可以看出采用了位移、加速度融合的手段,可以消除載荷及位移的低頻漂移現象,識別的圖線基本與理論值一致。另外,桁架的7個未知剛度識別值,如表1所示。可知,剛度識別值的準確性非常高。綜上所述,本文的模態EGED法以及融合策略對于解決結構的載荷、狀態以及參數識別問題具有很強的適用性。

圖2 載荷u1的實際值和識別值
(a) 載荷u2的實際值和識別值
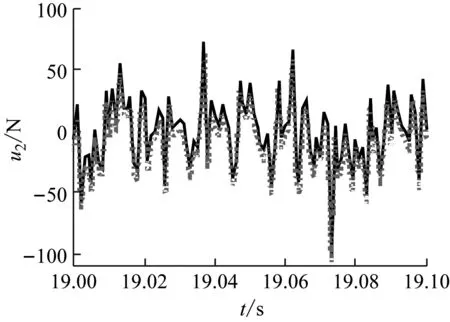
(b) 圖3(a)的局部放大圖(1~1.1 s)
5 結 論
(1) 基于模態縮減拓展了傳統EGDF法來進行載荷、狀態及參數的聯合識別,使得反演過程中無需載荷所在自由度的加速度測量信號。
(2) 為避免位移及載荷識別結果出現低頻漂移現象,采用個別位移響應融合原始加速度測量響應來共同識別系統。

(a) 節點7豎直位移的理論值及識別值
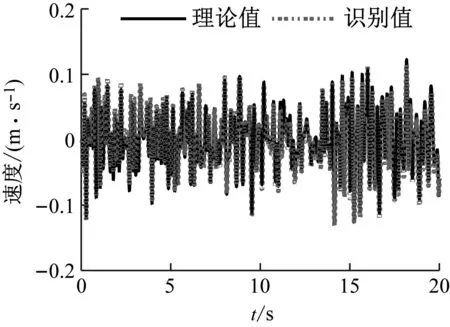
(b) 節點7豎直速度的理論值及識別值
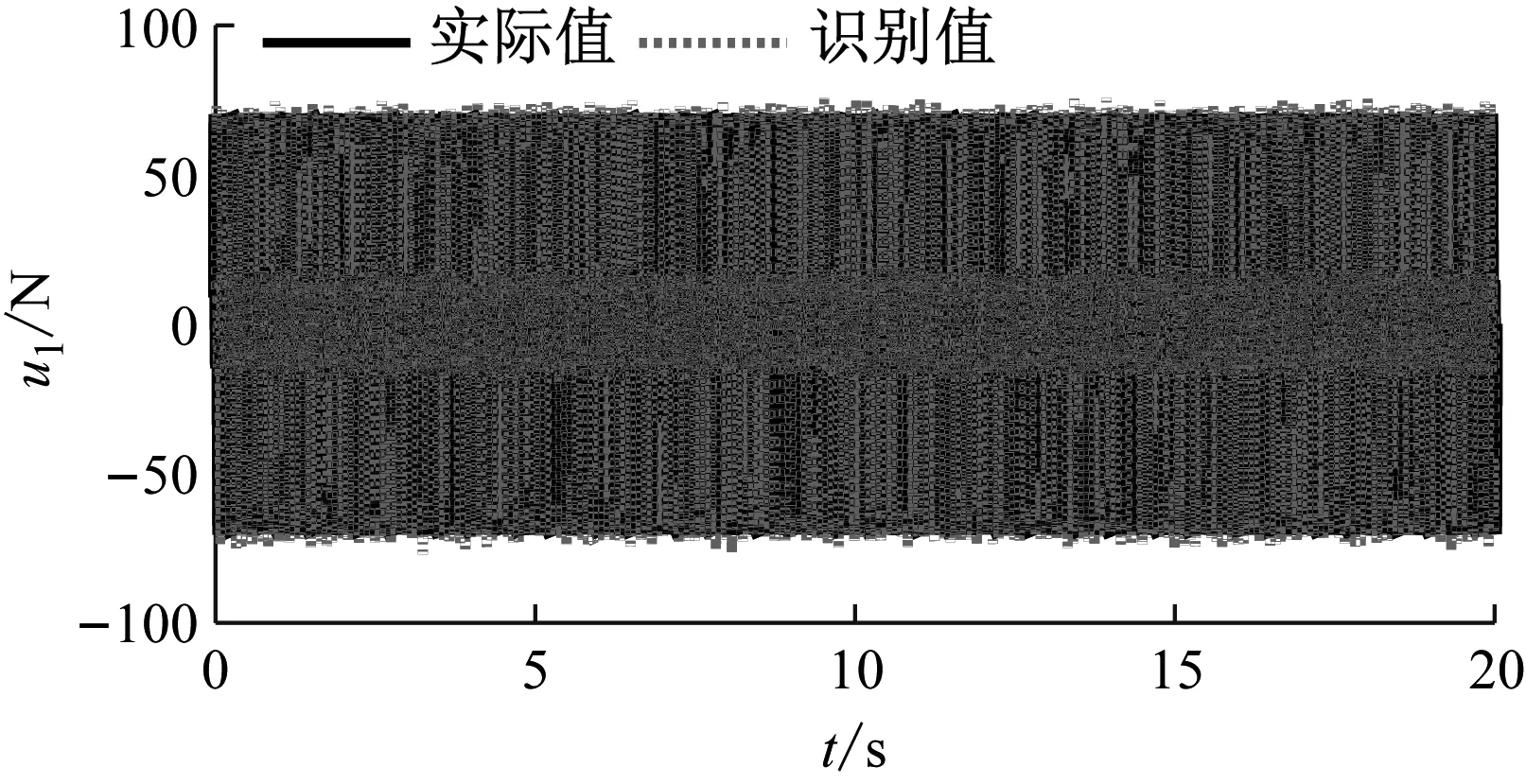
圖4 節點7豎直位移和速度的理論值及識別值
Fig.4 The theoretical and identified vertical displacement and velocity at Node 7
圖5 采用數據融合下的載荷u1的實際值和識別值
Fig.5 The actual and identified results of forceu1by data fusion
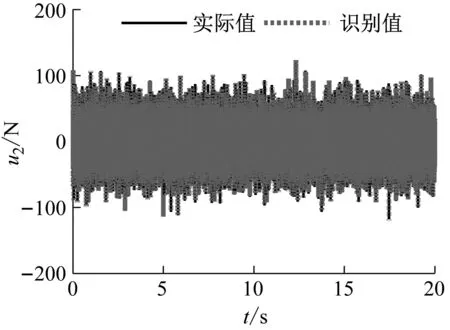
(a) 數據融合的載荷u2的實際值和識別值

(b) 圖6(a)的局部放大圖(19~19.1 s)
圖6 數據融合的載荷u2的實際值和識別值
Fig.6 The actual and identified results by data fusion

(a) 數據融合的節點7豎直位移的理論值及識別值

(b) 節點7豎直速度的理論值及識別值

圖7 數據融合的節點7豎直位移和速度的理論值及識別值
(3) 數值算例驗證了本文方法的有效性。當前的載荷假設為集中載荷,下一步的研究內容可以進一步考慮分布載荷下的系統聯合識別。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00