基于穩(wěn)態(tài)轉(zhuǎn)向特性的智能車輛換道軌跡規(guī)劃*
2019-07-19 05:36:50張新鋒李傳友夏八科
汽車技術(shù) 2019年7期
關(guān)鍵詞:規(guī)劃
張新鋒 李傳友 夏八科
(1.長安大學,汽車運輸安全保障技術(shù)交通行業(yè)重點實驗室,西安 710064;2.長安大學,汽車學院,西安710064)
主題詞:智能車輛 換道 軌跡規(guī)劃 轉(zhuǎn)向特性 安全距離模型
1 前言
我國高速公路里程僅占公路總里程的2.5%,但其死亡人數(shù)卻占公路交通死亡總?cè)藬?shù)的14%,高速公路上由駕駛員造成的事故占總數(shù)的74%[1-2]。汽車智能化發(fā)展在減少交通事故、緩解交通壓力等方面存在巨大潛能,已成為世界各國的研究熱點。其中,軌跡規(guī)劃是智能車輛研究的重點內(nèi)容之一,是指生成一段在未來時間和空間內(nèi)的行駛軌跡[3]。而換道是車輛最基本的駕駛行為,智能車輛換道軌跡規(guī)劃的研究對提高公路交通安全性、提高交通效率具有重要意義。
目前,國內(nèi)外學者從不同角度對智能車輛的軌跡規(guī)劃問題展開了研究。陳成等人提出一種基于四階貝塞爾曲線的軌跡規(guī)劃方法,并通過參數(shù)優(yōu)化規(guī)劃出曲率變化最小的軌跡曲線,但對交通車的考慮較少,實際應(yīng)用較為困難[4]。楊志剛等人提出了等速偏移軌跡函數(shù)和正弦函數(shù)疊加換道模型,解決了一部分換道模型的不足,但沒有考慮車輛的實際行駛環(huán)境[5]。Chien-Sheng提出了基于多項式函數(shù)的軌跡規(guī)劃方法,建立了加速度約束,速度邊界和路徑時間最優(yōu)的多項式參數(shù)化仿真模型,為更為精細和完整的動力學模型提供參考[6]。郭梟鵬通過結(jié)合人工勢場算法和快速搜索隨機樹算法,實現(xiàn)了實時軌跡規(guī)劃,但沒有考慮軌跡的最優(yōu)化選取和動力學約束,存在一定缺陷[7]。
利用多項式生成換道軌跡具有參數(shù)易獲取、曲線多階連續(xù)且易于擴展的優(yōu)點。本文利用多項式函數(shù)進行換道軌跡規(guī)劃,引入軌跡優(yōu)化函數(shù)和車輛動力學約束,防止車輛出現(xiàn)危險工況,并建立了換道安全距離模型,保證換道安全性。
2 基于多項式的換道軌跡規(guī)劃
本文研究智能車輛在高速公路上的換道軌跡規(guī)劃,主要考慮所在車道前車速度過低時,為擺脫低速行駛而進行的換道行為。高速公路具有單側(cè)所有車輛同向行駛、道路坡度平緩、存在連續(xù)曲率且曲率較小、可保障汽車高速行駛的特點。由于換道情景較為復(fù)雜,為了簡化模型,作如下假設(shè):
a.由于換道持續(xù)時間較短,一般為4 s左右,忽略換道過程中的速度變化;
b.所有車輛規(guī)格相同,即車輛長度、寬度相同;
c.換道過程中,換道車輛縱向運動與橫向運動相對獨立。
2.1 無交通車軌跡規(guī)劃
如圖1所示,以初始狀態(tài)車輛質(zhì)心為原點,以行駛方向為x軸正方向,y軸垂直于x軸指向行駛方向左側(cè)。換道車輛初始狀態(tài)可以通過車載傳感器獲得,目標位置狀態(tài)根據(jù)行駛目標設(shè)計。本文選擇含有6個參數(shù)的五次多項式分別描述縱向和側(cè)向軌跡,車輛換道軌跡函數(shù)可表示為:

式中,x(t)、y(t)分別為車輛換道過程中的橫、縱坐標;t為時間;a0~a5、b0~b5分別為多項式系數(shù)。
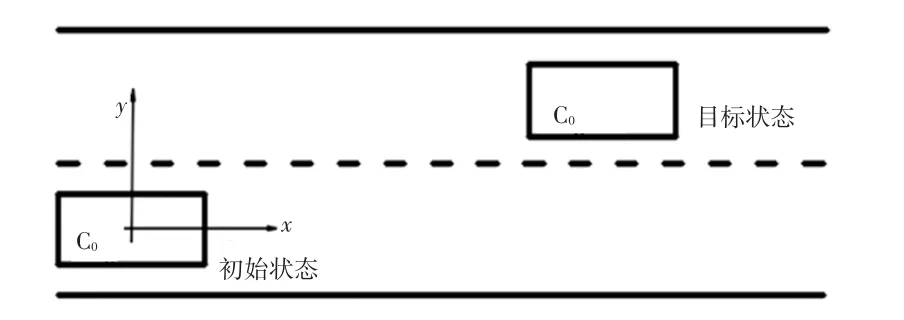
圖1 換道狀態(tài)
車輛在初始位置的坐標為(x0,y0),x方向初始速度和加速度分別為vx0、ax0,y方向初始速度和加速度分別為vy0、ay0;車輛在目標位置的坐標為(xf,yf),x方向速度和加速度分別為vxf、axf,y方向速度和加速度分別為vyf、ayf。由于車輛進行勻速換道,vx0=vxf=vc0(vc0為車輛質(zhì)心速度),ax0=axf=0,車輛在初始位置和目標位置平行于車道線運動,ay0=ayf=0。設(shè)車輛換道的初始時刻為t0,到達目標位置的時刻為tf,則根據(jù)初始狀態(tài)和目標位置狀態(tài)可得:

式中,yf與車道寬度相等,取yf=3.5 m;xf=vc0·tf。
式(2)中僅tf為未知量,因此可用tf表示多項式的各系數(shù),tf確定后即可確定換道軌跡。聯(lián)立式(1)、式(2)可得換道軌跡函數(shù)為:

2.2 典型換道工況軌跡規(guī)劃
在實際的典型換道工況中,交通車對換道車輛的影響不可忽視,其運動狀態(tài)的估計是進行軌跡規(guī)劃的前提。交通車的運動學方程可表示為[8]:
交通車的初始狀態(tài)可由車載傳感器獲得,但其運動學方程的輸入vr和ω未知,故其未來狀態(tài)未知。在實際行駛中,交通車大多遵循基本交通規(guī)則,因此本文合理假設(shè),在較短的運動周期內(nèi),交通車保持當前運動狀態(tài)不變,即交通車沿車道中心線勻速行駛:

式中,xt、yt分別為t時刻交通車在x、y方向的坐標;vx為交通車在x方向上的速度;(xi,yi)為ti時刻交通車的位置坐標。
換道過程中的潛在危險工況是主車未能充分進入相鄰車道時與交通車發(fā)生碰撞。本文假設(shè)主車在換道過程中以平動的方式運動,由于航向角較小,且其橫向位移遠大于縱向位移,可假設(shè)換道過程中汽車與車道中心線的夾角近似為零。
如圖2所示,主車在換道初始時刻以vc0速度行駛,探測到前方距離為S處存在交通車,該車以vcf勻速行駛。假設(shè)目標車道有安全換道空間,若vc0≤vcf,兩車不會相遇,按無障礙車進行軌跡規(guī)劃,若vc0>vcf,假設(shè)主車經(jīng)過tc時間后與交通車的距離為換道間距寬裕度[9]Sw,此時,若主車側(cè)向行駛距離大于交通車的寬度W,則主車已安全避開交通車,換道過程無碰撞風險,其間主車和交通車行駛的距離分別為Sc0tc和Scftc。
聯(lián)立式(3)、式(6)、式(7)可得:

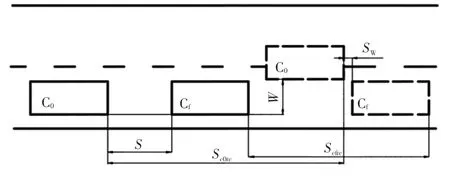
圖2 典型工況換道示意
由此可以通過限制tc時刻主車的側(cè)向位移,安全避開前方的交通車,實現(xiàn)安全換道。
3 約束條件與換道安全距離模型
3.1 約束條件
3.1.1 軌跡曲率約束
車輛在高速路上行駛時,需要考慮換道車輛的動力學約束和執(zhí)行機構(gòu)的約束,規(guī)劃結(jié)果需保證換道路徑的曲率連續(xù)且處于合適的范圍。本文利用穩(wěn)態(tài)車輛二自由度微分方程對換道車輛的側(cè)向加速度、前輪轉(zhuǎn)角和車速進行分析,得出換道路徑曲率與車速和側(cè)向加速度的關(guān)系,進而對換道路徑的曲率進行限制,滿足換道車輛動力學約束。
汽車運動微分方程為:
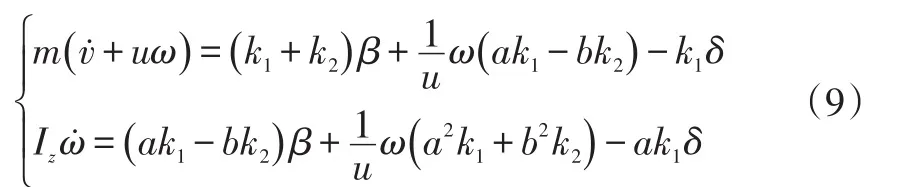
式中,δ為前輪轉(zhuǎn)角;k1、k2分別為車輛前、后輪側(cè)偏剛度;β=v/u為質(zhì)心側(cè)偏角;Iz為汽車繞Z軸的轉(zhuǎn)動慣量;u為質(zhì)心速度在x軸的分量;v為質(zhì)心速度在y方向上的分量;a、b分別為質(zhì)心到前、后軸的距離;m為汽車總質(zhì)量。
根據(jù)穩(wěn)態(tài)時汽車二自由度微分方程可得側(cè)向加速度與前輪轉(zhuǎn)角和速度的關(guān)系為:

式中,K為穩(wěn)定性因數(shù);g為重力加速度;L為車輛軸距。
由于車輛質(zhì)心側(cè)偏角較小,可以認為質(zhì)心速度與u相等,速度一定時,前輪轉(zhuǎn)角滿足:

穩(wěn)態(tài)橫擺角速度增益為:

又因v=ω·r,聯(lián)立式(11)、式(12)可得轉(zhuǎn)向半徑為:

則換道路徑曲率為:

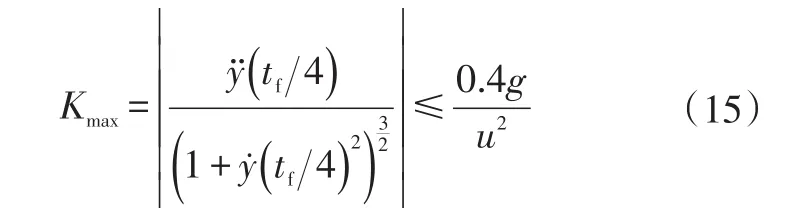
本文考慮車輛在高速公路的換道工況,故車速范圍設(shè)為60~120 km/h,不考慮車輛低速時的最小轉(zhuǎn)彎半徑。根據(jù)軌跡函數(shù)y(t)可知曲率的最大值存在于tf/4處,則換道路徑最大曲率為:
可得tf≥fk(u),fk(u)為依據(jù)式(15)求得的tf關(guān)于u的函數(shù)。確定tf的最小值即可確定換道車輛在速度為u時的換道路徑最大曲率,保證換道平穩(wěn)性。圖3所示為車速在25 m/s時依據(jù)不同tf規(guī)劃所得的軌跡族曲線,其中極限換道軌跡是依據(jù)穩(wěn)態(tài)轉(zhuǎn)向特性所求得的最大曲率軌跡曲線,其左側(cè)為易發(fā)生側(cè)滑的危險換道軌跡,右側(cè)為安全換道軌跡。
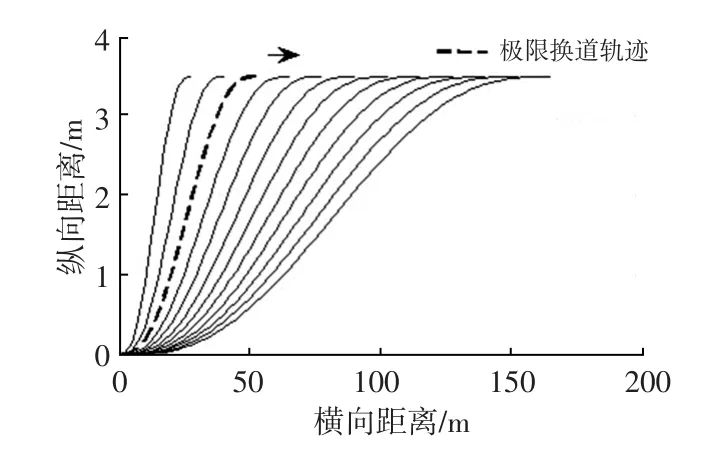
圖3 軌跡族曲線
3.1.2 軌跡優(yōu)化函數(shù)及其求解
在換道軌跡規(guī)劃中,tf的值一般根據(jù)經(jīng)驗獲得,具有很大的不確定性,本文通過引入換道軌跡優(yōu)化函數(shù)J對其進行最優(yōu)化選取。J的確定需要兼顧車輛的行駛效率、安全性、經(jīng)濟型和舒適性。為了簡化運算復(fù)雜度,提高軌跡規(guī)劃的實時性,本文以車輛的行駛效率、安全性和舒適性為優(yōu)化目標,在換道過程中,車輛安全隱患主要為換道車輛越過道路邊界,與交通車發(fā)生碰撞,在規(guī)劃算法中已對車輛的側(cè)向位移提出約束,對換道安全距離進行單獨分析,安全性得到保障。車輛的最大側(cè)向加速度越大,舒適性越差,而換道耗費時間越久,行駛效率越低。本文以車輛最大側(cè)向加速度aymax和換道時間為優(yōu)化變量,為彌補兩個指標在數(shù)量級上的差異,對兩者均進行無量綱化處理。引入函數(shù):
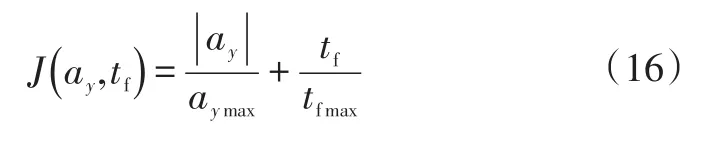
式中,ay<aymax;tfmin<tf<tfmax;tfmin=fk(v)為最小換道時間;tfmax為最大換道時間。
則軌跡優(yōu)化函數(shù)為:

對于軌跡優(yōu)化函數(shù)將ay和tf作為優(yōu)化變量的情況,引入遺傳算法對其進行求解。在遺傳算法中,設(shè)種群個體數(shù)目為40,最大遺傳代數(shù)為20,代溝為0.95,交叉概率為0.7,變異概率為0.01。本文選用二進制編碼,染色體X的形式可表示為:

式中,n為種群規(guī)模。
本文將軌跡規(guī)劃中的軌跡優(yōu)化函數(shù)作為遺傳算法的目標函數(shù)和適應(yīng)度,定義為:

將輪盤賭選擇算子作為遺傳算法的選擇算子,個體的適應(yīng)值越高,被選擇的幾率越大,被選擇概率可表示為:
式中,fj為個體j的適應(yīng)值。
在約束條件的設(shè)置中,采用搜索空間限定法,加入對軌跡優(yōu)化函數(shù)參數(shù)的約束和車輛自身的約束:
3.2 換道安全距離模型
圖4所示為一種典型的換道工況,主車C0在當前車道行駛,車道前方和后方有交通車Cf和Cr,目標車道存在交通車 Clf和 Clr。Cf、Cr、Clf和 Clr是影響換道安全性的主要因素,在換道安全性分析中,Cr與C0的安全性主要由 Cr負責,故不再討論。本文主要對 Clf、Clr和 Cf對 C0換道安全性的影響進行分析。
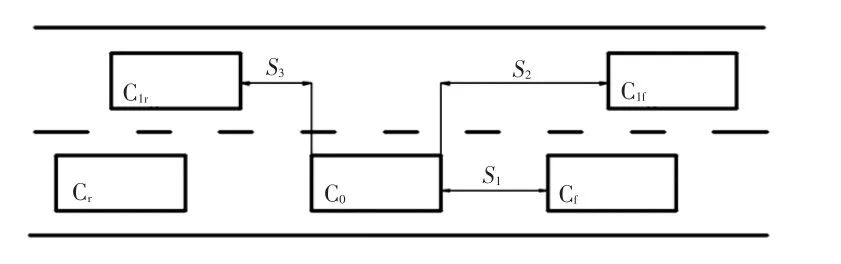
圖4 典型換道工況
3.2.1 目標車道換道安全性分析
目標車道交通車對換道安全性的影響主要為C0進入目標車道時因換道空間不足與Clf或Clr發(fā)生碰撞。C0與Clf、Clr的距離可由傳感器測得,Clf、Clr在目標車道保持勻速行駛,假設(shè)C0在當前時刻進行換道,預(yù)測換道結(jié)束后C0與Clf、Clr的距離,通過判斷其是否滿足換道安全距離要求確定當前時刻是否可以安全換道。換道完成時,C0與Clf的距離可表示為:

式中,vlf為 Clf的車速;S2為換道前C0與 Clf的距離;Sc0為C0在換道期間的縱向行駛距離。
車輛跟隨模式的主動避撞安全距離模型[10]為:

式中,Dsf為主動避撞安全距離;vrel=vlf-vc0為C0與Clf的相對速度;δa=0.52vc0-0.121 5為期望相對減速度;df1=0.850 9vf+1.610 9為相對減速度消除后C0與Clf的距離。
在換道結(jié)束后,主車與前車需要保持的安全距離遵循主動避障安全距離,即當Slf≥Dsf時可執(zhí)行換道。
完成換道時C0與Clr的距離可表示為:

式中,S3為換道前C0與Clf的距離;vlr為Clr的車速。
當vc0≥vlr時,若S3≥0,C0與Clr不會發(fā)生碰撞;當vc0<vlr時,C0與Clr之間應(yīng)保持主動安全距離:

換道結(jié)束后,C0與Clr需要保持的安全距離遵循主動碰撞安全距離模式,即當Slr≥Dsr時可執(zhí)行換道。
3.2.2 當前車道安全性分析
由式(17)可知,當Kmax=0.4g/v2、換道軌跡為極限換道軌跡時換道軌跡曲率最大、換道時間最短,即tfmin=fmin(v),則最小安全換道縱向距離為x(tfmin)=vc0tfmin。在最小安全換道距離下,要安全避開Cf需滿足y(tcmin)>W(wǎng),則安全換道情況下C0與Cf最小安全距離為DS-cfmin=vc0tcminvcftcmin。換道前C0與Cf需滿足縱向最小安全距離:

式中,S1為換道前C0與Cf的距離。
通過以上分析可以得到滿足車輛安全性的換道安全距離模型為:
當C0與Cf以及Clf與Clr滿足以上條件時可執(zhí)行換道。
4 仿真分析
設(shè)主車在換道時的初始速度為25 m/s,在t0時刻開始換道,結(jié)束換道時主車的橫向加速度、側(cè)向加速度均為0,車道寬度取為3.5 m,在MATLAB和CarSim中分別進行無交通車和典型換道工況下的規(guī)劃仿真和動力學仿真,采用的參考車型軸距為2 910 mm,路面為附著系數(shù)為0.85的混凝土路面。
4.1 無交通車軌跡規(guī)劃仿真
設(shè)同車道和相鄰車道無交通車,C0車速恒定為25 m/s,無制動,轉(zhuǎn)向模式為駕駛員軌跡跟隨模式。仿真結(jié)果如圖5所示:由圖5a可求得最優(yōu)換道時間為4.85 s;由圖5b可以看出,當前規(guī)劃軌跡在極限換道軌跡右側(cè),滿足轉(zhuǎn)向特性約束;由圖5c~圖5e可知,側(cè)向加速度、橫擺角速度和軌跡偏離值在合理范圍內(nèi)。
4.2 典型換道工況軌跡規(guī)劃仿真
設(shè)Cf以18 m/s勻速在車道中心線上行駛,S1=15 m,Clf、Clr分別以30 m/s和28 m/s的速度勻速行駛,S2=35 m,S3=40 m。對各車距進行安全距離判定,由優(yōu)化函數(shù)和最大曲率限制可得,當前工況最優(yōu)換道時間為3.88 s,當前車速下最短換道時間為2.1 s。由式(27)可知,各車距符合換道安全距離模型,可執(zhí)行換道。
仿真結(jié)果如圖6所示,由圖6a可得最優(yōu)換道時間為3.88 s,由圖6b可以看出,當前規(guī)劃軌跡在極限換道軌跡右側(cè),滿足轉(zhuǎn)向特性約束,由圖6c~圖6e可知,側(cè)向加速度、橫擺角速度和軌跡偏離值均在合理范圍內(nèi)。
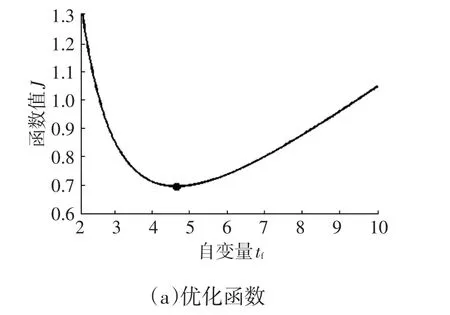
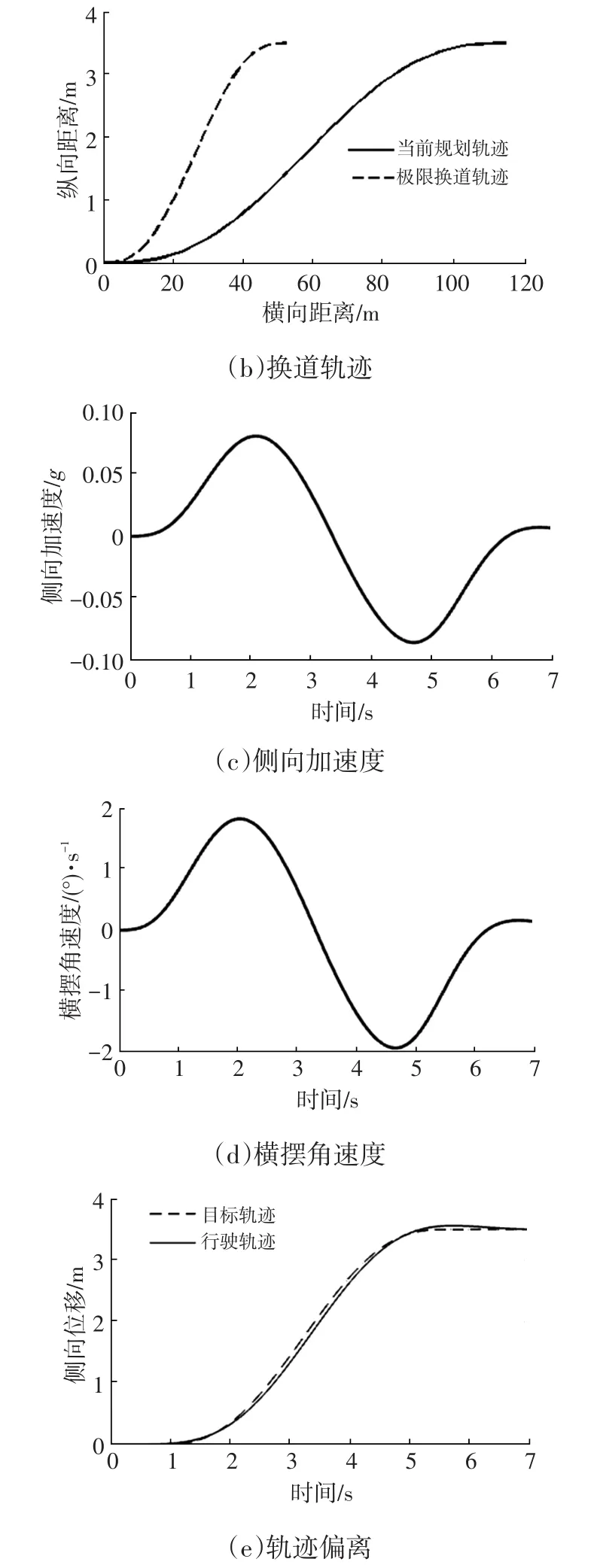
圖5 無障礙換道仿真結(jié)果
通過仿真可以看出,在無障礙和典型換道工況下?lián)Q道時,規(guī)劃出的軌跡曲線滿足車輛換道需求,側(cè)向加速度和橫擺角速度在合理的范圍內(nèi),車輛的舒適性和穩(wěn)定性較高,軌跡偏離值在一定范圍內(nèi),軌跡的可跟蹤性能可得到滿足。
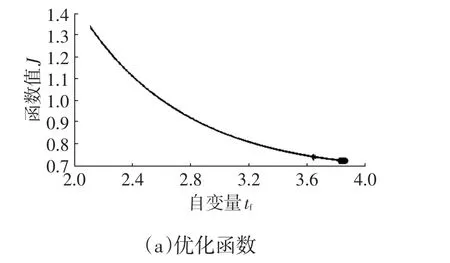
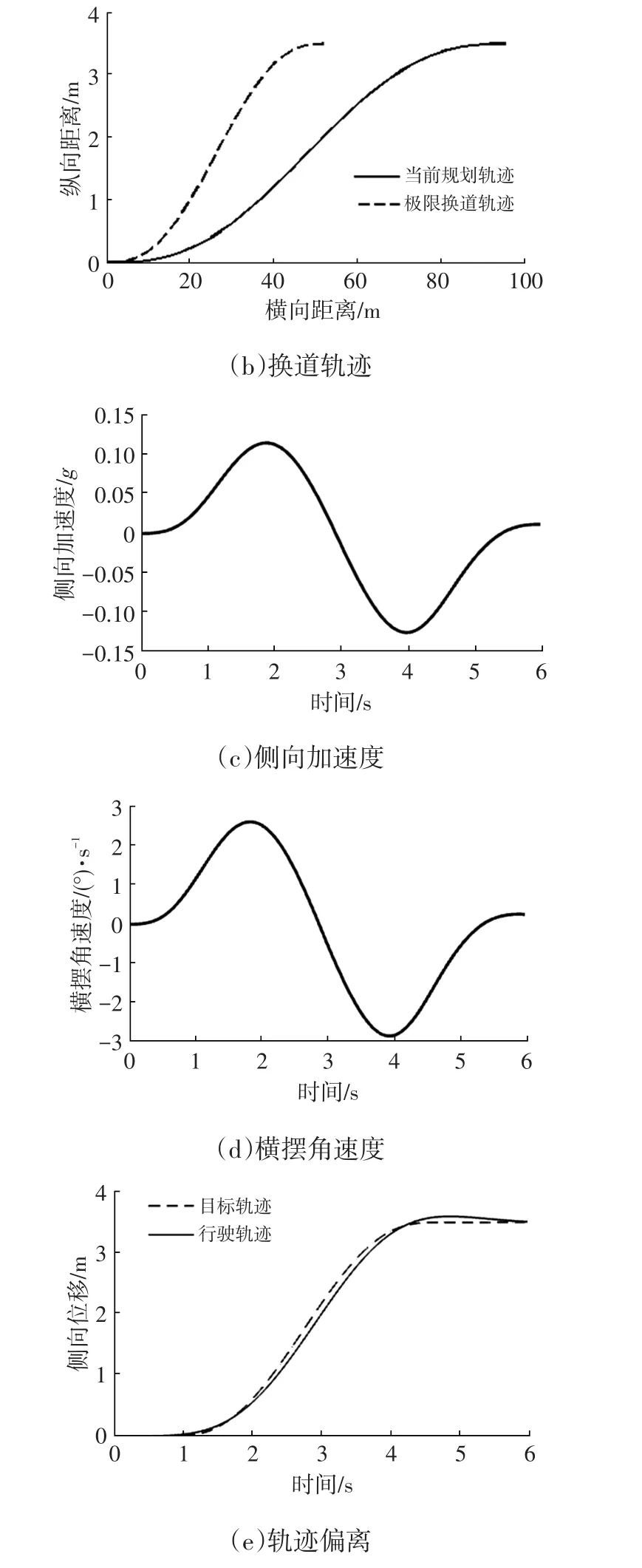
圖6 動態(tài)換道軌跡仿真結(jié)果
5 結(jié)束語
本文提出了一種考慮高速時穩(wěn)態(tài)轉(zhuǎn)向特性的換道軌跡規(guī)劃方法,利用多項式函數(shù)建立換道軌跡模型,引入以換道時間和側(cè)向加速度為變量的軌跡優(yōu)化函數(shù)對軌跡進行最優(yōu)選取,降低了依靠經(jīng)驗選取換道時間的不確定性。同時,建立了換道安全距離模型,保證車輛換道的安全性,基于車輛穩(wěn)態(tài)轉(zhuǎn)向特性對軌跡曲線的曲率進行限制,通過確定車輛在穩(wěn)態(tài)轉(zhuǎn)向特性下允許的最大換道軌跡曲率對車輛的最小換道時間進行限制,避免車輛在高速時因軌跡曲率過大發(fā)生側(cè)滑現(xiàn)象。最后,通過仿真分析驗證了該方法的合理性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
