基于OpenGL平臺示教機器人運動控制及仿真實現
2019-07-15 07:03:12李建賓任華麗
裝備制造技術 2019年5期
關鍵詞:模型
李建賓,任華麗
(1.廣西大學研究生院,廣西 南寧530007;2.武漢市黃陂區職業技術學校,湖北 武漢432200)
0 引言
機器人技術作為綜合性學科,其包含了機械、控制各方面的知識,從世界上第一臺工業機器人誕生至今,機器人技術已經有了長足的發展,并取得了很多成果,而且機器人已經大量應用到實際生產。計算機技術不斷的發展,讓仿真技術起到越來越不可忽視的作用,機器人仿真的任務,是在與實際機器人不接觸情況下,對機器人進行運動學、動力學、軌跡規劃、碰撞檢測、性能測試等進行復雜計算工作,可以在三維世界中控制機器人,并對機器人進行必要的虛擬仿真示教。
1 工業機器人仿真研究
在20世紀60年代,美、英、日等發達國家相繼在課堂進行機器人教學,機器人教學研究得到蓬勃發展,但是由于機器人價格昂貴,以及機器人操作需要大而獨立的試驗場地等諸多因素,不可能實現每位學生都同時有一臺機器人進行實際操作,并且機器人課時安排緊張,學生學習的效果并不理想,而三維可視化仿真技術的發展,讓我們有了一個非常好的平臺對機器人進行相應的研究,可以交互式示教仿真。
國內研究現狀:目前各高校及研究所對機器人仿真研究越來越重視,從開始探索階段,到收獲豐碩成果階段,在機器人仿真中取得了很多成果。例如清華大學THROBSM機器人仿真系統,上海交通大學俞文偉和鄧建一開發的ROSIDY仿真軟件,清華大學崔培蓮和孫增圻PCBOBSM微機機器人仿真軟件,北京工業大學陳晏、余躍慶利用多體動力學軟件LMS Virtual.Lab和有限元分析ANSYS開發的剛柔耦合機器人動力學仿真系統,華北電力大學利用MATLAB6.0,OpenGL和VC++2010三者結合開發的機器人仿真通用試驗平臺。
本文利用OpenGL的實時交互性,模擬機器人的示教/再現過程,可以檢驗所編寫機器人程序的正確性。在機器人物理樣機實驗之前,可以通過在仿真系統上進行模擬仿真,觀察機器人模型的運動過程以及運動結果,這樣可以避免在操作機器人物理樣機時對周圍物體和人員造成傷害。并且此仿真系統可以提供與現實機器人物理樣機幾乎相同的操作步驟,在實際操作人員真正操作機器人物理樣機之前,可以增加操作員的操作熟練程度,增加操作員的使用安全系數。
2 OpenGL概述
OpenGL為開放的圖形程序接口,其前身為SGI公司開發的IRISGL,SGI公司在IRISGL基礎上于1992年7月發布了OpenGL的 1.0版本。后來OpenGL的1.0版本成為工業標準,OpenGL作為業界2D和3D圖形接口標準,應用在成千上千萬的計算機程序中,從初期的嶄露頭角,到與Direct3D激烈競爭,中途經歷波折發展了20多年,最后被Khronos接收后發揚光大,OpenGL已經發展到了目前OpenGL4.4版本,OpenGL是一種底層圖形庫,是一個完全可移植并且速度很快的3D圖形和建模庫。OpenGL不是一種編程語言,它是一個三維圖形軟件包,其具有開放性,OpenGL可以與Visual C++緊密接口,OpenGL能夠對三維建模進行渲染著色,從而繪制出逼真的三維景象,是一款非常適合做可視化仿真系統的工具。
2.1 OpenGL繪制流程
在OpenGL繪制過程中,首先頂點數據,像素數據可以在現實列表中顯現出來,通過運算器對逐個頂點進行計算,然后光柵化,最終形成圖形碎片,像素數據及操作結果存儲在紋理組裝用的內存中,流程操作最后,圖形片元進行一些列逐個片元操作,結果像素值送入幀緩沖器實現圖形顯示,圖1為OpenGL繪制流程圖。
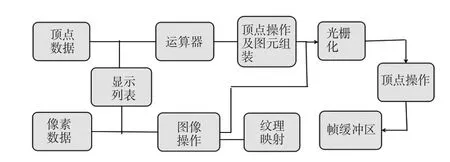
圖1 OpenGL繪制流程圖
2.2 基于OpenGL機器人軟件仿真界面建立
本示教機器人三維模型主要由底座、連桿等組成,通過利用glu庫函數(gluCylinder和gluDisk)及縮放、轉移等變換繪制出了底座,連桿的模型。通過模型轉換函數繪制出機器人三維模型,其模型轉換的函數的作用:glTtanslate{fd}(TX,TY,TZ)T 是 TYPE的縮寫,其表示將當前的矩陣與其它矩陣相乘,并將物體平移xyz三個坐標的指定方向,glRotate{fd}(Tangle,Tx,Ty,TZ)表示將當前的矩陣與其它矩陣相乘,矩陣繞原點到點(x,y,z)直線的逆時針旋轉的角度。glScale{fd}(TX,TY,TZ)表示將當前的矩陣與其它矩陣相乘,沿坐標軸縮放,然后在每點坐標上分別乘以參數xyz。繪制機器人部分模型,機器人連桿可以通過對立方體進行不同的縮放、轉移、旋轉變換來進行繪制,圖2是基于openGL繪制的仿真軟件界面。
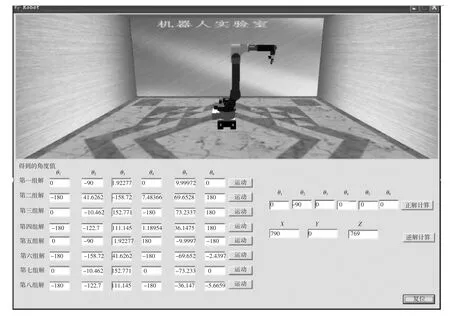
圖2 OpenGL中繪制的仿真軟件界面
2.3 基于OpenGL軟件仿真及操作應用
通過軟件可以觀察六自由度示教機器人的運動狀況,在軟件控制部分輸入末端坐標,機器人末端執行命令并運動到設定的坐標點,并通過點擊按鈕“逆解計算”可以得到8組在此末端設定坐標系下相對應的逆解。通過點擊“復位按鈕”,機器人恢復到初始狀態。虛擬現實軟件功能分為正解計算、逆解計算、給定坐標末端運動。通過開發此仿真軟件還可以實現人機交互操作模式,增強初學者對機器人的直觀感知,使用者可以通過在軟件中輸入機器人末端在空間的不同坐標值來獲取機器人各關節角的姿態,實現機器人位置逆解算法。
2.3.1 正解計算
在關節角 θ1、θ2、θ3、θ4、θ5、θ6靜態編輯框中輸入角度值,機器人末端抓持器位姿隨關節角變化而變化,六自由度機器人也隨之運動。設定 θ1= 20°、θ2= -30°、θ3= 30°、θ4= -50°、θ5= 50°、θ6= 30°,可以得出給定某一關節角對應的機器人位姿。如圖3為正解計算機器人位姿。
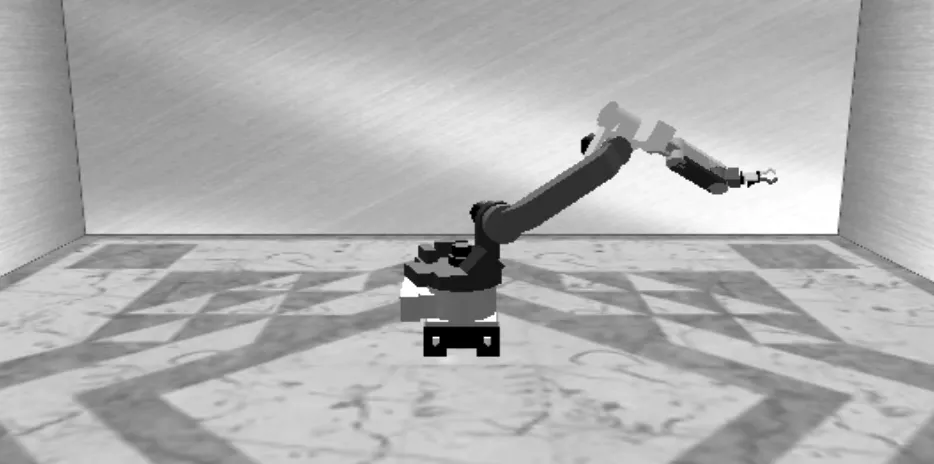
圖3 正解計算機器人位姿
2.3.2 逆解計算
在六自由度機器人逆解計算靜態編輯框輸入x、y、z坐標值,當設定初始末端坐標 x=790,y=0,z=769后,點擊“逆解計算”,對應得到各關節角數值,點擊“運動”按鈕,機器人就會隨之運動。并得到第六組反解對應的機器人位姿。如圖4為逆解計算機器人位姿。
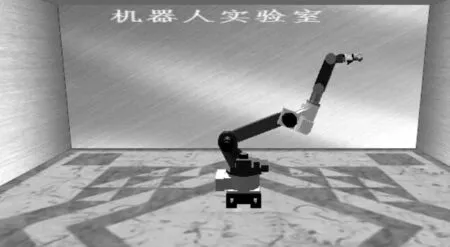
圖4 逆解計算機器人位姿
2.3.3 給定坐標末端運動
在六自由度機器人逆解計算靜態編輯框輸入x、y、z坐標值,可以任意給定末端坐標x=1 200,y=0,z=100,然后點擊“逆解計算”,機器人末端就會隨之運動到設定的坐標點位置。并得到是給定坐標末端運動機器人位姿。如圖5為給定坐標機器人末端位姿圖。
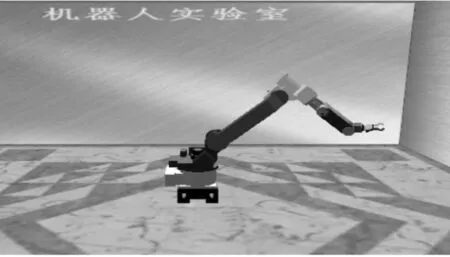
圖5 給定坐標機器人末端位姿圖
3 結束語
目前市面上機器人價格過于昂貴,價格從幾千上萬不等,而且購買回來,還需要給機器人提供操作的場地,由于目前各高校或者研究所由于經費或著場地的制約,不可能讓每個學員或研究者都能親自操作物理樣機,而仿真技術發展,可以通過人機交互,讓我們與機器人之間在虛擬環境世界中進行示教。基于OpenGL開發的示教機器人三維動態仿真系統,可以直觀的描述了示教機械臂運動過程,該仿真操作簡單,滿足基本仿真要求,對示教機器人仿真技術的研究具有重要的實踐意義[1-2]。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19