模糊預測控制在地鐵舒適度方面的研究與仿真
2019-07-13 01:47:28王金剛
鐵路通信信號工程技術 2019年6期
王金剛
(通號城市軌道交通技術有限公司,北京 100070)
1 概述
地鐵作為大城市重要交通工具,乘客對其舒適度的要求也越來越高,列車縱向沖擊率(列車運行方向加速度的變化率)作為判斷舒適度的重要標準,各地招標文件對舒適度也提出明確要求,在保證停車精度指標滿足的情況下,要求列車縱向沖擊率小于等于0.75 m/s3。本文就模糊預測控制算法在地鐵舒適度方面進行研究和仿真,并提出模糊預測控制方案設計,通過在M A T L A B平臺上對模糊預測控制器進行仿真,說明模糊預測控制算法相比PID 控制可以提高地鐵舒適度。
2 ATO系統速度調整控制原理和舒適度因素分析
2.1 ATO系統速度控制原理
ATO 利用車-地通信設備雙向通信傳輸,實現對列車牽引和制動進行控制,能夠替代司機智能化地駕駛列車,使列車運行經常處于最佳狀態,提高乘客的舒適度和列車準點率,節約能源。A T O 采用高可靠性的閉環控制系統,能夠周期性地從列車自動防護系統(Automatic Tr ain Protection,ATP)獲取前方最新的目標距離和目標速度,結合自身定位信息、速度傳感器獲得的列車即時速度信息以及列車自動監控(Automatic Tr ain Sup er v ision,A TS) 下發的調整命令,計算命令速度曲線,并將命令速度和實際速度的差值作為控制模型的輸入,控制模型再結合線路數據中彎道和坡度等信息自動計算控制策略,輸出控制級位下達至列車。若能夠在A T O 閉環控制系統中采用有效控制策略,使得A T O 可以在一定范圍內對列車牽引和制動性能的改變做到自適應,可以有效地兼顧乘客舒適度和列車運行效率。ATO 系統速度控制原理示意如圖1 所示。
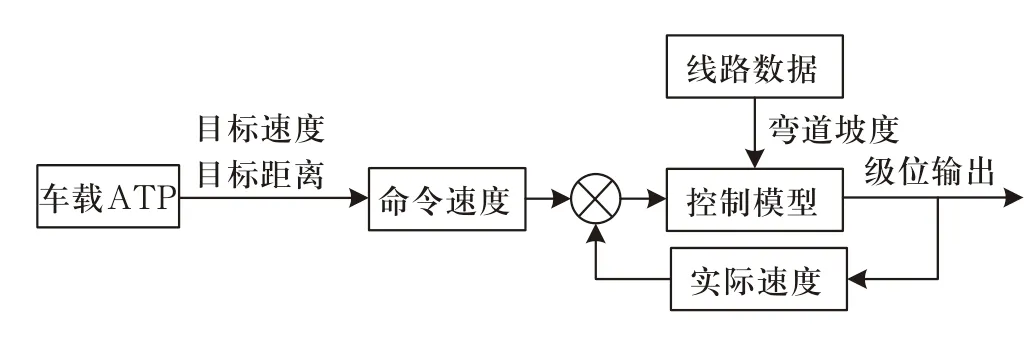
圖1 ATO系統速度控制原理示意圖Fig.1 ATO system speed control principle diagram
2.2 舒適度因素分析
影響地鐵舒適度的因素是多方面的,主要是列車在啟動和制動過程中,或者遇到彎道或者上下坡等干擾過程中,列車控制級位頻繁切換、加速度和加速度的變化率過高都會引起乘客舒適度降低。因此,列車運行中盡量降低牽引和制動的切換頻率,加速度的變化率保持在一定合理范圍內。
參照相關文獻資料,通過測試加速度和舒適度的關系,以20% 的測試人員不能容忍的加速度值作為最大極限值,加速度的最大值為1.8 m/s2,實際值范圍1.2 ~1.4 m/s2;加速度變化率的最大值2 m/s3,實際值范圍0.7 ~0.8 m/s3。
3 模糊預測控制原理和方案設計
3.1 模糊控制原理
模糊控制器是模糊控制系統核心模塊。模糊控制器的結構主要包括模糊化接口、推理機、知識庫、解模糊化接口4 個模塊組成,如圖2 所示。
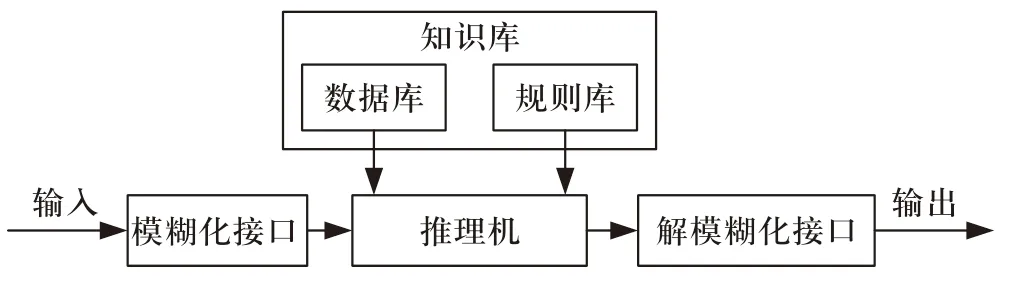
圖2 模糊控制器的結構圖Fig.2 Fuzzy controller structure diagram
3.2 預測控制原理
預測控制具有預測模型、滾動優化和反饋校正等特點,其原理如圖3 所示。
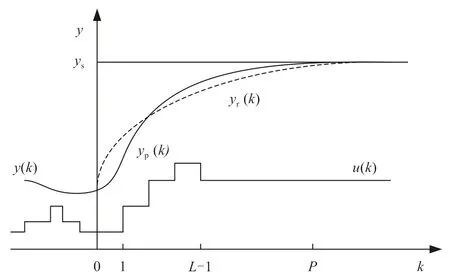
圖3 預測控制原理圖Fig.3 Predictive control principle diagram
其中,k <0 表示過去的采樣時刻,k=0 表示當前的采樣時刻,k >0 表示未來的采樣時刻。ys表示參考軌跡的設定值,yp(k)代表k 時刻的預測輸出值,yr(k)表示k 時刻期望輸出值。預測控制算法就是通過比較yp(k)與yr(k)之間的誤差e(k)作為控制模型的輸入,計算下一時刻的控制量u(k)(k=1,2,…,L-1),使誤差e(k)逐漸達到最小值。P 稱為預測步數,L 稱為控制步數。
3.3 模糊預測控制方案設計
A T O 算法關鍵要解決的問題有兩點:一是如何使操縱策略和駕駛行為等智能應用在算法中得到體現,二是如何處理變化的因素。模糊控制作用在列車上輸出級位等級命令,整個過程為模糊控制;預測控制是模糊控制的補充,是針對模糊控制對延時大的系統列車模型時變、控制精度不高等特點而設置的,能夠預測下一時刻的控制量,通過比較預測輸出和實際輸出的偏差反饋到模糊控制器的輸入端,對預測模型起到在線校正的功能,整個過程為預測控制。
通過上述描述,設計模糊預測控制器。核心思想就是通過預測模型得到預測輸出值yp和目標速度設定值yr進行比較,兩者之間的誤差e 和誤差變化率ec作為模糊控制器的輸入,通過模糊控制器得到控制量u 作用于列車控制系統中,有效滿足列車速度的控制,提高達乘客的舒適度,如圖4 所示。

圖4 模糊預測控制器Fig.4 Fuzzy predictive controller
4 仿真結果
目前絕大多數列車運行控制系統還是基于傳統的PID 控制,通過MATLAB 軟件中的Simulink仿真環境分別采用PID 和模糊預測控制控制對列車的速度進行仿真。
列車模型:設計列車模型如公式(1)所示:

線路設計:設計列車從啟動、勻速、制動整個過程的運行時間為200 s,其中啟動時間為20 s,勻速時間為175 s,制動時間為25 s。
列車信息:設計列車目標速度v 為80 k m/h,加 速 度a 范 圍1.2 ~1.4 m/s2, 取 加 速 度a=1.2 m/s2,因此啟動過程中系統的調節時間為ts=22.2/1.2=18.5 s,取調節時間ts=20 s。取列車常用制動距離為270 m,常用制動減速度為1.0 m/s2,常用制動時間約為25 s。
在列車啟動和制動過程中,采用兩種控制方式對列車的加速度進行仿真,如圖5、6 所示。

圖5 基于PID控制器的加速度仿真Fig.5 Acceleration simulation based on PID controller
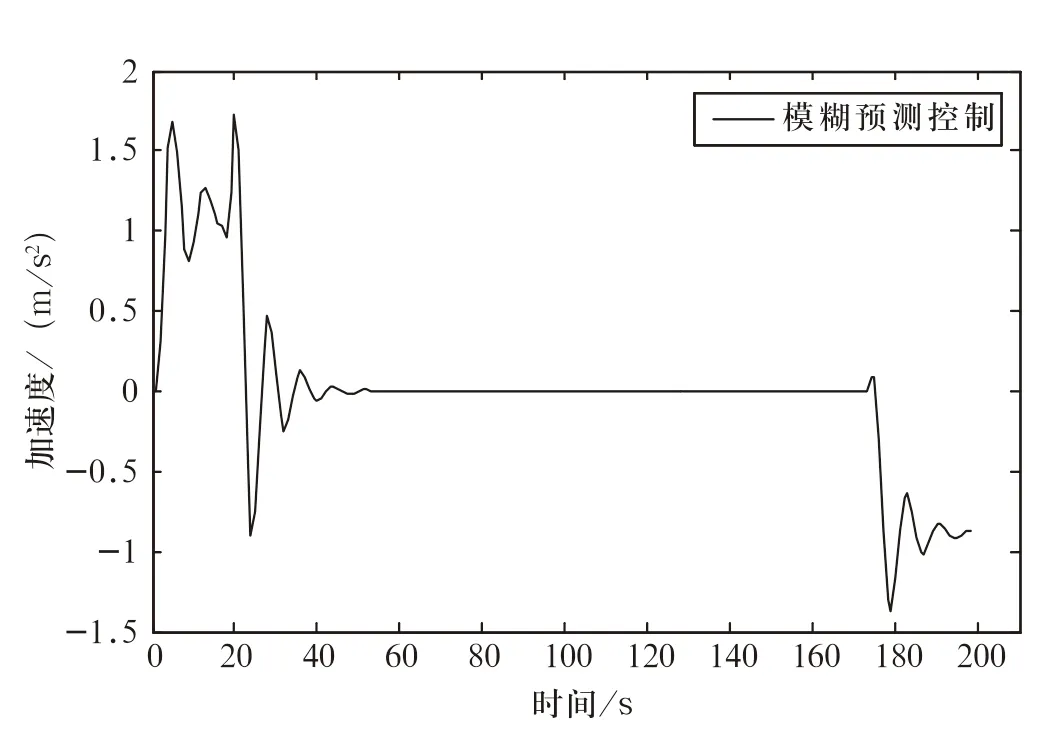
圖6 基于模糊預測控制器的加速度仿真Fig.6 Acceleration simulation based on fuzzy predictive controller
通過圖5、6 對比,加速度實際值范圍1.2 ~1.4 m/s2,按照加速度a 大于1.4 m/s2作為乘客感到不舒適的標準。顯然PID 控制加速度大于1.4 m/s2的持續時間比模糊預測控制要長,說明模糊預測控制在列車的啟動和制動過程中對乘客的舒適度要高于PID 控制。
在列車勻速過程中,遇到彎道或者上下坡等干擾過程中,設計一個坡道實驗:當列車運行到100 s時遇到上坡道,且在40 s 后遇到相同角度的下坡道,采用兩種控制方式對列車的加速度進行仿真,如圖7、8 所示。
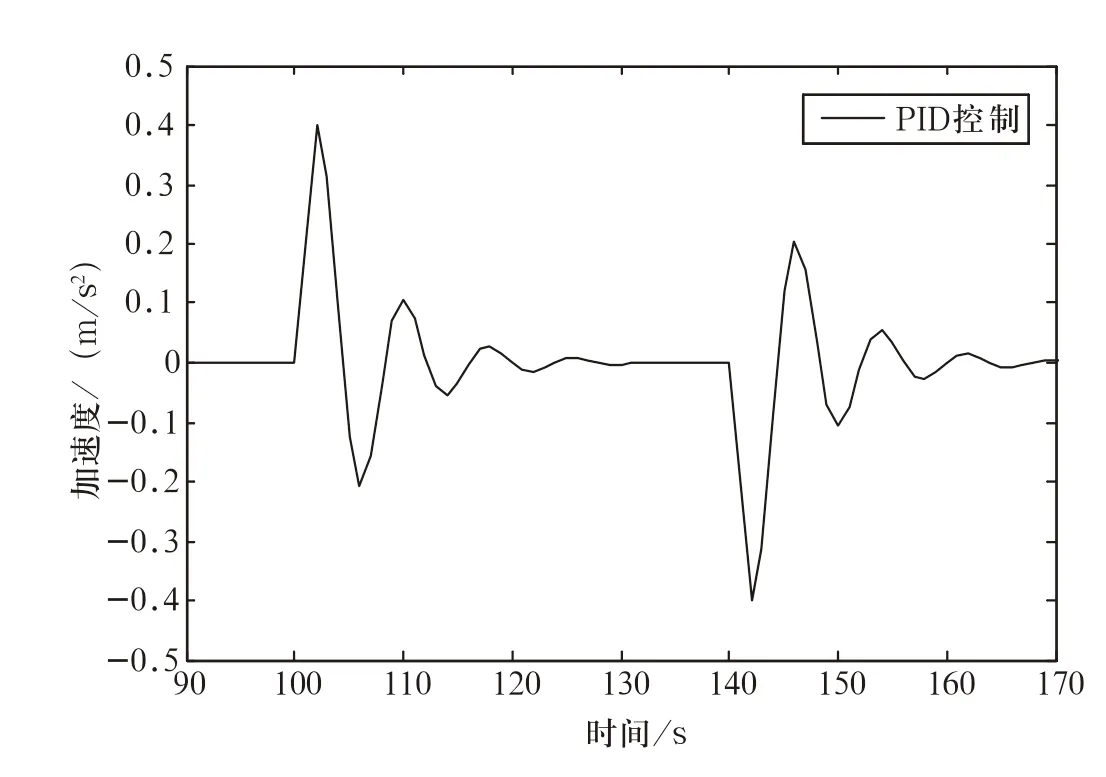
圖7 線路有干擾時PID控制器對列車加速度的控制Fig.7 Control of train acceleration by PID controller when there is interference on the line
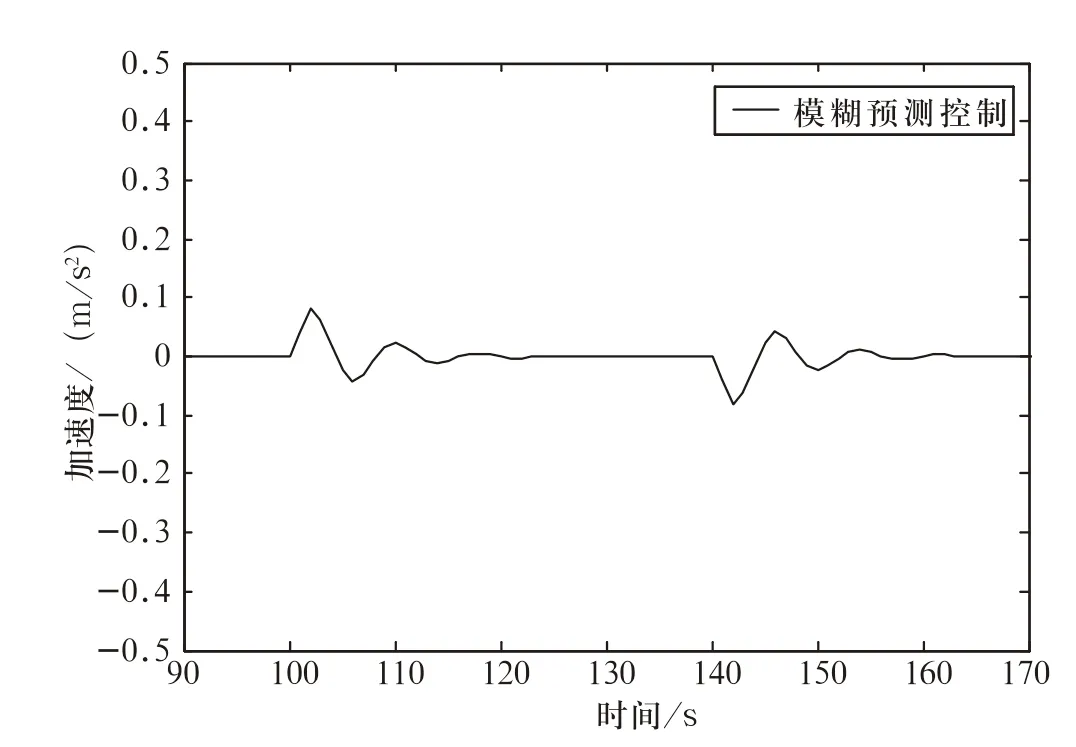
圖8 線路有干擾時模糊預測控制器對列車加速度的控制 Fig.8 Control of train acceleration by fuzzy prediction controller when there is interference on the line
通過圖7、8 對比,當列車遇到彎道或者上下坡等干擾過程中,PID 控制加速度出現較大且持續時間較長的尖峰,模糊預測控制加速度出現較小且持續時間較短的尖峰,說明模糊預測控制在列車勻速過程中對乘客的舒適度要高于PID 控制。
5 結語
本文采用了PID 控制和模糊預測控制算法對列車的加速度進行仿真,通過設置相同的列車模型、線路設計、列車信息對列車在啟動、勻速、制動過程中進行對比研究,通過仿真結果可以看出采用模糊預測控制器在列車運行控制系統中有較好的舒適性指標。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2022年3期)2022-04-19 12:51:06
紡織科學研究(2021年9期)2021-10-14 08:52:12
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
鐵道通信信號(2020年1期)2020-09-21 08:55:16
數學物理學報(2020年2期)2020-06-02 11:29:24
成都信息工程大學學報(2018年3期)2018-08-29 01:08:52
浙江工業大學學報(2017年5期)2018-01-22 02:03:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03