海底管道探測技術應用
2019-07-11 01:41:04劉振方1朱友生陳冠軍
中國海洋平臺 2019年3期
關鍵詞:作業
劉振方1, 朱友生, 陳冠軍
(1.中海油田服務股份有限公司, 河北 三河 065201; 2.中海油田服務股份有限公司 物探事業部工程勘察作業公司, 天津300451)
0 引 言
海底管道是海上油氣輸送的大動脈,是海上油氣田的重要組成部分。海底管道受漁業活動、地質災害等各種復雜因素影響,一旦泄漏,將會造成嚴重的環境污染、經濟損失和社會影響,因而有必要及時有效地查明海底管道的位置和狀態,評價其安全風險并及時維護。
本文通過分析多種海底管道探測技術的原理、影響因素及優缺點,將其劃分為兩大類:一類是工程物探法,一般用于大面積普查;另一類是潛水作業法,一般針對普查中發現的重大隱患及已建平臺附近小范圍的詳查和檢修等。結合多年實際調查作業經驗,總結這些技術在各種環境條件下的適用性和經濟性,根據中國海上油田不同海域環境條件推薦相應的管道探測方案,為海底管道的維護和安全運營提供技術保障,供相關技術和管理人員參考。
1 工程物探法
海底管道和周圍地層沉積物在聲波、電磁等物理性質方面存在差異。工程物探法就是利用各種物探設備尋找、識別和分析各種差異,以達到探測目的。這類探測技術主要有測深儀(單波束和多波束)探測、側掃聲吶探測、掃描聲吶探測、合成孔徑聲吶探測、淺地層剖面探測和磁力儀探測等[1-5]。
1.1 測深儀探測
測深儀的工作原理是由換能器向水中發射一個(單波束)或多個(多波束)具有一定空間指向性的短脈沖聲波(波束),波束到達海底后,發生反射、透射和散射,回波被換能器接收,根據聲速和傳播時長可計算換能器到海底的距離。重復這一過程就可對水深進行連續測量,利用這一特點,可實現對海底管道的探測。與單波束相比,多波束測深具有直觀、高效和高分辨率等特點[6]。

圖1 南海某區多波束圖像顯示裸露與懸空的管道
當海底管道裸露或懸空時,可通過測量管道與海底面的相對高差判斷管道的狀況:相對高差大于管徑時為懸空,等于或小于管徑時為裸露[3,7],如圖1所示。這種判斷方法通常對敷設于海底面的管道有效,當管道敷設于管溝中時,測探儀的探測能力受水深、溝寬和溝深等因素的影響。水深的增大將導致換能器單位時間內能接收到的有效聲信號數目(即采樣更新率)減少,分辨率降低[7-8];在同一水深處,波束角越小,反映的微地貌越細致,大波束角的測深儀無法將海底管道和溝坡區分開來。由于受到波束角的影響,探測到的管溝有可能發生形變,與管道的反射相互混淆,造成解釋困難。
另外,測深儀發射的聲波無法接觸到埋藏的海底管道,無法探測其位置及埋深,此時需結合其他設備[7-9]進行測量。
1.2 側掃聲吶探測
側掃聲吶俗稱海底掃描[2,9],主要根據聲波發射和返回時間的長短,用不同的灰度加以顯示,形成海底探測帶的聲學圖譜圖像,可清楚地看到海底的特征和位于海底面的目標物。根據側掃聲吶的幾何關系,運用相似三角形原理,可計算出目標物的高度[10];側掃聲吶還可以探測海底目標物(包括海底管道)的位置、狀態、規模等。在出現管道的側掃聲吶圖像中,可根據管道兩側的陰影判斷其狀態[2,10]。側掃聲吶圖像中的海底管道如圖2所示。

圖2 渤海某區側掃聲吶圖像中的海底管道
基于側掃聲吶的原理,可以得出結論:對于裸露的管道,特別是有一定長度規模或有水泥壓塊防護等輔助設施的管道(見圖2),側掃聲吶探測效果顯著、精度高、可靠性強,能夠達到事半功倍的效果;對于掩埋的管道,其探測效果較差[4,11],僅可對掩埋狀態進行確認,對掩埋位置只能根據管道埋設留下的痕跡作出大致判斷,探測埋深還需結合其他技術[2,10]。

圖3 MS1000掃描聲吶
1.3 掃描聲吶探測
掃描聲吶相當于一種定點可旋轉式的側掃聲吶,其原理為:換能器發射聲脈沖,遇到海底或物體時反射回波,回波被聲吶接收后,根據信號時延和強度形成圖像,然后旋轉聲吶探頭,再次重復發射和接收過程,最后旋轉360°形成一幅完整的海底圖像。在作業時,探頭由一個三腳支架固定,將三腳支架放到海底后,探頭靠重力作用在水中保持豎直,通過一根電纜對其進行供電及數據傳輸,如圖3所示。掃描聲吶的掃描范圍在0.5~100.0 m之間,可用不同的量程記錄聲吶圖像。量程越小,分辨率越高,圖像越清晰,細小的物體也越容易被探測到。

圖4 渤海某平臺掃描聲吶圖像中顯示的海底管道(局部有水泥壓塊防護)
掃描聲吶調查具有作業效率高、準確性高、成圖直觀等優點。作業受天氣及周圍施工影響小,2~3人即可,攜帶設備少、使用方便、操作簡單,可依托已建平臺或船舶實施作業。
但是,掃描聲吶也存在一些不足之處:與側掃聲吶類似,無法探測掩埋的管道;聲吶探頭放入海底后,無法確定探頭初始方位,掃描圖像缺少有效的坐標信息;必須在掃描圖像上找到兩個已知坐標的參考點(通常選取平臺樁腿)對圖像進行修正(見圖4),對于沒有明顯參考點的調查區域則無法得出其坐標信息。因此,一般在已建平臺附近使用掃描聲吶進行海底管道及地貌探測。
1.4 合成孔徑聲吶探測
合成孔徑聲吶(Synthetic Aperture Sonar,SAS)是一種高分辨率成像聲吶,其基本原理是利用小尺寸基陣在運動軌跡上的順序位置發射并接收回波信號,根據空間位置和相位關系,對不同位置的回波信號進行相干疊加處理,進而獲得沿運動方向的高分辨率聲吶圖像。合成孔徑技術主要有兩項優點:一是對目標的分辨能力與距離和采用的聲信號頻率無關;二是可以采用小尺度的聲吶基陣獲得高分辨率的目標圖像,且方位向分辨率在全測繪帶上保持恒定高分辨率,不受作用距離影響。因此,SAS探測技術是掩埋目標(包括管道)探測的理想技術。
SAS探測方式與側掃聲吶探測方式基本一致,都是將換能器固定于船側某一位置或者拖曳于船尾一定距離,開動船只,在設計的測線上低速航行并進行同步定位。SAS也可搭載于水下自治機器人(Autonomous Underwater Vehicle,AUV)或遙控無人潛水器(Remote Operated Vehicle,ROV)上進行探測作業。
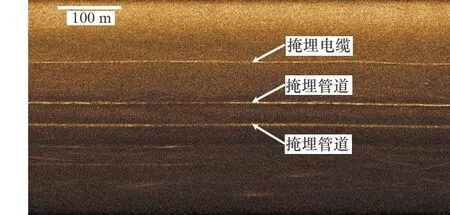
圖5 SAS圖像中的管道
雙頻SAS在進行海底管道探測時,最大探測寬度可達300 m,探測深度可達2 m,在探測寬度范圍內可以探測出連續的管道圖像,易對海底管道進行追蹤,如圖5所示。其彌補了淺地層剖面儀只能垂向交點探測的不足,提高了探測精度和工作效率,是掩埋海底管道探測的有效技術手段。但是,現階段雙頻SAS只能定性判斷管道的掩埋深度[12]。與其他設備相比,雙頻SAS設備價格昂貴,性價比相對較低。
1.5 淺地層剖面探測
淺地層剖面探測是一種基于水聲學原理的連續走航式探測水下淺地層結構和構造的地球物理方法,其基本原理與測深儀類似,通過換能器將控制信號轉換成聲脈沖向海底發射,該聲脈沖在海水和地層傳播過程中遇到聲阻抗界面,一部分反射回換能器,另一部分繼續向地層深處傳播,同時回波陸續返回,聲波傳播的聲能逐漸損失,直到耗盡為止,這些返回來的聲波被儀器接受并轉換成模擬或數字信號記錄和儲存,最后輸出為反映地層聲學特征的剖面[13]。
海底管道在淺地層剖面儀圖像上表現為一條拋物線,拋物線頂點就是管道的平面位置,拋物線頂點到海底面的垂距就是管道的掩埋深度或裸露懸空高度。根據管道引起的拋物線頂點位置與海底反射之間的相互關系判斷管道的空間狀態:如果拋物線頂點位于海底反射以上,且高度大于管道直徑,則為懸空;如果高度小于管道直徑,則為裸露,如圖6所示;如果拋物線頂點位于海底反射以下,則為掩埋[1,13],如圖7所示。

圖6 南海某區淺地層剖面圖上裸露的管道 圖7 渤海某區淺地層剖面圖上掩埋的管道
淺地層剖面儀探測海底管道屬于剖面探測,在與管道垂直的測線上具有很好的探測效果,但由于管道是連續的,這就會留下很長距離的空白段,探測這些空白段的管道需要結合其他設備進行。例如,對于平面位置不明確的管道,需結合磁力探測或側掃聲吶探測,先進行區域探測,確定管道的大致分布區域后再進行淺地層剖面探測,以獲得海底管道的準確參數。
調查表明,海底底質、氣水界面、外界噪聲、海況等多種海上環境因素對探測效果有較大影響[2]。實踐證明,使用淺地層剖面儀探測管徑小于101.6 mm的管道效果較差[14]。
1.6 磁力儀探測
磁力儀可以探測各種不同直徑的海底管道,但無法探測非金屬材料管道[12]。對于金屬材料制成的海底管道使用磁力儀探測時,磁力調查測線一般垂直于管道走向布設[15],當作業船攜帶或拖曳磁力儀在管道上方經過時,磁力儀將有異常值顯示,將每條測線上的磁力異常點位置連接在一起,就可以確定管道的位置和走向[4,15]。
物體在某點的磁場強度與該物體的體積及性質成正比,與距該物體的距離的三次方成反比。在探測直徑較小或者埋深較大的管道時,應采取一些必要措施,以提高探測精度,如:適當降低船速、在磁力儀附近增加配重等,使磁力儀的拖魚盡量靠近海底(一般距離海底4~8 m為宜);使用小噸位和無磁性或弱磁性的木質小漁船作為測量船;調查過程中拖纜長度應大于船長的3倍以上[12,15]。
海底管道的磁力異常容易受到周圍介質的影響,如果在管道周圍存在鋼板、鋼管、鐵絲、錨鏈以及平臺時,探測結果將會有偏差,因此,在近平臺海底管道調查時,需采用其他探測方式進行。
2 潛水作業法
與工程物探法相比,潛水作業法更直觀。潛水作業法有人工潛水探摸和ROV搭載兩種方式。潛水探摸即潛水員入水對海底管道進行探摸,確定管道位置及狀態[16]。ROV搭載是由水面母船上的工作人員利用連接ROV的臍帶纜,操縱ROV通過搭載水下攝像機、各種聲吶等專用設備進行直觀觀察或探測,還能通過多功能機械手進行相關水下作業[17]。ROV搭載可以理解為人工潛水探摸的延伸,是一種直接接觸式的方法,同時還可搭載多種物探設備進行探測,也可稱為一種綜合探測方法。
2.1 潛水探摸探測技術
潛水探摸探測技術是指潛水員攜帶超短基線(Ultra Short Base Line,USBL)水下定位系統的信標入水直接對海底管道進行目視檢查的一種方法。海底管道的位置使用水面差分全球導航衛星系統(Differential Global Navigation Satellite System,DGNSS)和USBL水下定位系統對潛水員進行綜合定位間接確定;管道狀態依靠潛水員頭頂攜帶的水下攝像機及潛水員的目視檢查結果確定。
潛水探摸對于裸露管道可準確定位。作業時潛水員沿管道每隔2~5 m采集一個點,根據潛水員攜帶的攝像機及視覺描述,可獲得定位點處管道的狀態,如裸露長度、懸跨高度、周圍障礙物情況等。潛水員近距離接觸管道易發現工程物探方法不易發現的障礙物及損傷等狀況,不僅能校核工程物探結果的可靠性,而且也提高了探測結果的準確性[16]。潛水探摸可依托已建平臺、四點錨泊船舶或動力定位船舶探測海底管道。
潛水探摸作業受天氣影響大,風險高,作業效率低(僅在平潮期作業),作業人員和設備多受平臺場地限制,成本相對較高,在水深大于60 m或水流較急的情況下潛水員入水危險性相當大。
2.2 ROV搭載管道探測技術
ROV搭載管道探測技術主要利用ROV搭載相關的物探設備進行海底管道探測。在一般情況下,母船應為動力定位船,同時配備水下定位系統對ROV進行定位。一般來看,ROV搭載管道探測技術包括以下幾種:
(1) ROV搭載水下攝像機。該方法獲得的資料比較直觀易判讀,容易確定管道精確位置。但是,該方法要求海水清澈,在水質渾濁地區不太適用,如圖8所示。

圖8 工作級ROV及作業時拍攝的海底管道
(2) ROV搭載聲吶(多波束測深儀、側掃聲吶、掃描聲吶、高清晰度雙頻識別聲吶)。該方法獲得的資料直觀易判讀,也容易確定管道精確位置,對海水的清晰度沒有要求。
(3) ROV搭載雙頭截面掃描儀。該方法類似于淺地層剖面儀,用于管道斷面掃描和懸空探測,資料成果的優缺點與淺地層剖面儀基本一致。
(4) ROV搭載TSS 350/440管道探測儀、海底成像儀等。該方法可以對管道兩側一定范圍(20 m以內)、海底以下一定深度范圍(5 m以內)進行探測,可對海底管道進行連續跟蹤探測[18]。
綜上所述,ROV搭載管道探測技術優點在于用機器人代替人,降低了作業風險,動力充足,可滿足復雜的探測設備和較大的作業機械用電,信息和數據的傳遞和交換快捷方便、數據量大,采集的資料質量高。但是,在作業時需要動力定位船只,需要水下定位系統及搭載專業探測設備和作業人員,資料采集速度慢(1 kn左右)、作業效率低、成本高,(1)和(2)都不能探測掩埋的管道,這些因素都限制了ROV搭載管道探測技術的廣泛使用。
3 探測技術比較分析及應用方案
上述各種探測技術在探測海底管道的空間狀態方面均能取得一定的效果。結合多年管道探測的工程經驗和實際效果,從原理、影響因素、優缺點、所需作業人員數量、作業載體、作業設備采購成本等方面,對各種管道探測技術進行對比分析,如表1所示。

表1 海底管道探測技術對比
根據中國海上油田的水深及自然環境條件,綜合考慮作業效率和成本,對于各海區管道探測技術的應用提出如下方案。
3.1 渤海探測方案
渤海海域水體渾濁、能見度較低,已開發的油氣田水深一般小于30 m,可使用綜合管道探測技術對平臺間海底管道進行探測,即:使用單波束、多波束、側掃聲吶對海底管道周圍海底地形地貌、障礙物及狀態(裸露/掩埋)進行探測,使用淺地層剖面儀探測海底管道的位置及埋深。該方案具有作業效率高(可24 h連續作業,作業時速可達3~5 kn)、成本低(使用小型作業船舶即可)的優勢。考慮到綜合管道探測方法在近平臺段(已建平臺周圍100 m范圍內)的局限性(為保證已建設施、作業船舶和設備的安全造成的數據無法全覆蓋、已建平臺對定位及探測信號的干擾等),對平臺周圍100 m以內的海底管道建議以掃描聲吶為主、潛水探摸為輔進行探測。這種分區域綜合探測技術充分發揮了各種探測技術的優點,既提高探測效率,又滿足對數據質量和精度的要求。在進行數據處理時,可將各種探測數據進行綜合分析、相互檢核,從而最終確定管道的準確位置和狀態。
上述方法在綏中36-1油田群、秦皇島32-6油田、渤中28/34油田群進行了應用,實際效果良好。在一次性調查工作量較大時,也可考慮使用單波束、多波束、合成孔徑聲吶、淺地層剖面等組合的綜合探測方式進行作業,同樣可以達到類似的應用效果。但是,在工作量不大的情況下,由于合成孔徑聲吶價格昂貴,經濟性并不強,因此不推薦使用。
3.2 東海探測方案
東海海域水質良好,已開發的油氣田水深在100 m左右,但登陸管道所在的近岸區域水體渾濁,能見度較低。對東海海域平臺間海底管道及登陸管道可使用綜合管道探測技術進行探測,同時使用USBL水下定位系統對水下拖體進行定位,以提高探測定位精度。平臺周圍100 m以內的海底管道宜使用ROV搭載管道探測技術進行作業,能保證探測效果和精度,但成本較高,經濟性也不強。作業者可根據油氣田生產運營的實際需要選擇合適的方法。
3.3 南海探測方案
南海海域跨度較大,已開發的油氣田水深從幾十米到1 500 m左右不等,海底管道探測方案可按水深和區域分類。北部灣潿洲、烏石海域已開發的油氣田區水深一般小于60 m,管道探測方案可借鑒渤海海域;北部灣東方、樂東及其他大部分水深大于60 m但小于150 m的油氣田區域的管道探測方案可借鑒東海海域;在水深大于150 m的海域,海底管道大部分不掩埋,由于南海地質條件復雜,推薦使用ROV搭載管道探測技術進行作業。因此,在海上油田海底管道維護和安全運營中,應根據水深、環境條件、管道性質、規模及埋設方式等,選擇合適、經濟、有效的管道探測方案。
4 結 論
本文系統地總結了各種管道探測方法的基本原理、影響因素、優缺點及適用性等。根據這些特點,將管道探測技術劃分為兩大類:工程物探法和潛水作業法。結合多年調查作業經驗和中國不同海域油氣田的水深、環境條件、管道性質、規模及埋設方式等,推薦相應的管道探測方案,為海底管道的維護和安全運營提供技術保障,供相關技術和管理人員參考。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
