連鑄結晶器振動位移系統中非線性處理
2019-07-11 11:16:54方一鳴李建雄鄭會成
中國機械工程 2019年12期
李 強 方一鳴,2 李建雄 鄭會成
1.燕山大學工業計算機控制工程河北省重點實驗室,秦皇島,066004 2.國家冷軋板帶裝備及工藝工程技術研究中心,秦皇島,066004
0 引言
連鑄結晶器的非正弦振動是發展高效連鑄的關鍵技術之一[1-2]。利用伺服電機的單方向、變角速度轉動來驅動結晶器非正弦振動是一種新方式[3],具有傳動系統簡單、結構緊湊、使用壽命長、節能降耗、便于維護等優點。
在工業實際中,連鑄結晶器振動系統存在初始時刻偏心軸機械零位的偏移、外部時變擾動等問題,因此常采用結晶器振動位移閉環控制來提高結晶器的跟蹤精度,保證結晶器振動的平穩性。伺服電機驅動的連鑄結晶器振動位移系統中,系統輸出量為結晶器振動位移,執行機構為伺服電機。根據文獻[3]的分析可知,結晶器的振動位移曲線近似正弦函數曲線且為中心對稱,而伺服電機為單方向轉動,電機角位移恒大于0,因此在區間[0,∞)內,伺服電機角位移與結晶器振動位移不是一一對應,增加了控制器設計的復雜性。文獻[4]采用T-S模型將輸出非線性系統轉化為線性時變系統,并考慮系統的約束條件來設計控制器;文獻[5]采用反饋線性化的方法對模型進行輸入輸出線性化,實現系統的解耦和非線性模型的線性化;文獻[6]通過構建輸出與輸入的函數關系,采用極值搜索方法設計控制器。但伺服電機近似為線性系統,結晶器振動位移為非線性,采用上述方法求解跟蹤控制問題仍然比較復雜。
針對輸出方程為非線性周期函數的問題,文獻[7]采用分段函數的處理方法,以結晶器振動周期為界,對不同的區間段,采用不同的控制策略建立結晶器振動位移輸出到轉角的映射關系。分段函數方法已應用于多種控制器的設計[8-10]。但在實際中,由于采樣周期的存在易造成分段區間判定條件的誤差,使得分段函數變化提前或滯后,從而造成計算誤差,影響控制效果。
本文在分段函數的基礎上提出一種基于誤差的非線性處理算法,通過建立偏心軸轉角誤差與結晶器振動位移的映射關系,來保證伺服電機轉角到結晶器振動位移非線性關系的唯一性。為驗證本文非線性處理算法的有效性,設計了伺服電機驅動的連鑄結晶器振動系統位移環PID控制器,并通過仿真和實驗研究,對比分析正弦和非正弦兩種給定信號情況下的跟蹤效果,驗證本文所提方法的有效性。
1 伺服電機驅動的連鑄結晶器模型分析
1.1 系統模型
伺服電機驅動的連鑄結晶器振動系統裝置見圖1,系統的控制過程為:結晶器振動位移檢測裝置將結晶器振動位移反饋到數控系統,位置控制器根據期望軌跡信號和實際檢測信號分析計算出控制律,控制伺服電機轉動,通過減速器、偏心軸和連桿機構實現結晶器振動。控制過程見圖2。
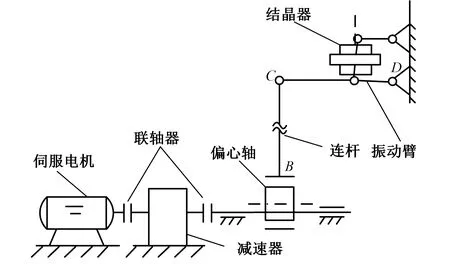
圖1 連鑄結晶器振動系統裝置圖Fig.1 Diagram of continuous casting mold vibration system

圖2 連鑄結晶器振動位移系統控制框圖Fig.2 Structure drawing of the control system for the continuous casting mold vibration displacement system
伺服電機模型為
(1)
式中,θn為電機轉角;ω為轉子的角速度;Ud、Uq分別為定子電壓的d、q軸分量;Id、Iq分別為定子電流的d、q軸分量;L為定子繞組等效電感;ψf為轉子永磁體產生的磁鏈;Rs為定子電阻;p為電機的極對數;J為轉子轉動慣量;B為黏性摩擦系數;TL為負載轉矩。

由于實際中電流環的采樣周期很小,針對d-q軸電流分別采用2個PI控制器來穩定跟蹤誤差,控制器參數值由伺服控制器自整定,因此,本文主要基于式(1)的前兩個方程設計位置環控制器,即
(2)
在實驗室的理想情況下,模型參數不考慮外部的影響,均看作常值。
機械傳動機構主要包括偏心軸、連桿機構及結晶器振動臺,偏心軸連桿結構見圖3。
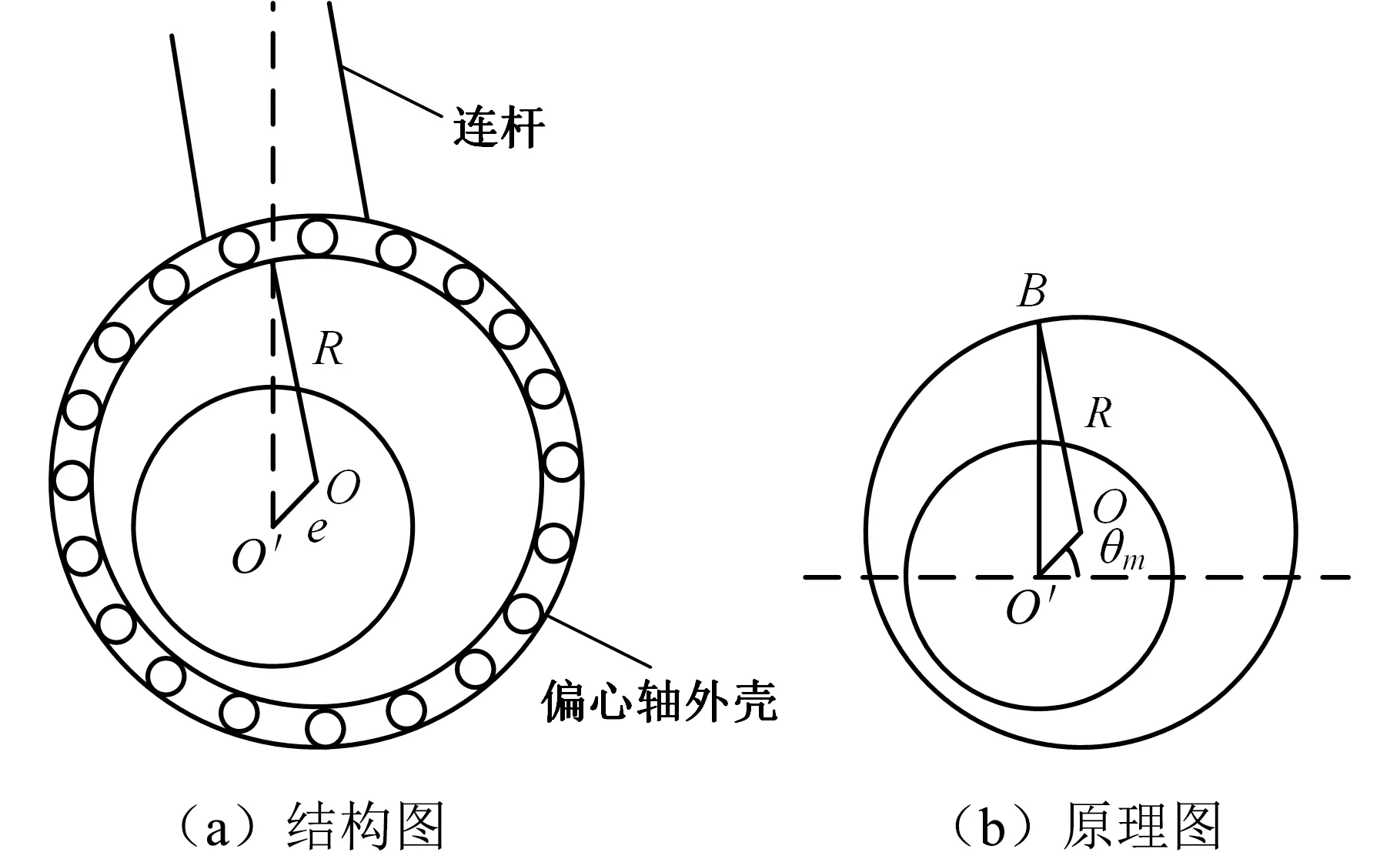
圖3 偏心軸Fig.3 Eccentric shaft
根據文獻[3]分析可得機械傳動部件機理模型:
S?hsinθm
(3)
式中,h為結晶器振動系統振幅;θm為偏心軸角位移,θm=θn/i;i為減速齒輪減速比。
通過分析式(2)、式(3)可知,在進行位移反饋控制時,構建結晶器振動位移與伺服電機轉角之間的關系能有效簡化控制器設計。但結晶器振動位移為周期函數,而偏心軸角位移與伺服電機角位移為線性關系,偏心軸轉角與結晶器位移間的正弦函數關系在[0,∞)內的逆解不唯一。因此,有效解決結晶器振動位移與偏心軸轉角間一一對應的關系,能夠簡化控制器設計。
1.2 現有方法分析

(4)

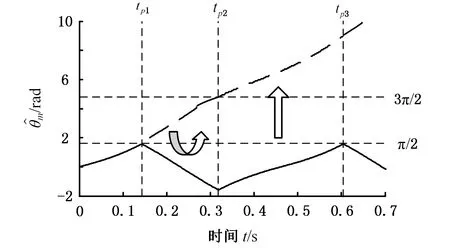
圖4 偏心軸轉角轉化過程Fig.4 Conversion process of the eccentric shaft angle
本文在文獻[7]分段函數的基礎上提出了一種非線性處理算法,通過建立偏心軸轉角誤差與結晶器振動位移的映射關系,保證伺服電機轉角與結晶器振動位移非線性關系的唯一性。
2 連鑄結晶器振動位移系統非線性處理算法
針對偏心軸轉角與結晶器振動位移的非線性周期函數問題,以及k值變化可能提前或滯后的特點,提出一種基于誤差的非線性處理算法。


圖5 正弦函數在象限區間中的對應關系Fig.5 Corresponding relation between reference circle and sine function
假設1 結晶器振動位移S及期望軌跡S*是連續可微的,一階導數和二階導數存在且有界。
假設2 結晶器振動位移S及期望軌跡S*的相位差小于π/2。


(5)
證明:
首先,根據實際工況和圖5所示,結合結晶器振動系統模型,可以得出:

(6)

則綜合上述分析可得
(7)
根據式(6)、式(7)可以得出
其次,證明結晶器角位移輸出誤差的連續性[12]。
假設結晶器振動位移實際信號值滯后于期望信號值,相應的反正弦函數值如圖6所示,圖中,taj表示期望信號為極值的時刻;tcj表示實際信號為極值的時刻;在taj和tcj時刻之間,為便于分析,選取實際信號與期望信號值相等的時刻為tbj。則根據式(5)的表達式:
圖6 利用反正弦角度值求解Δθm的過程Fig.6 Solution process of Δθmbased on the arcsine value


(8)

(9)


(10)

(11)
(12)

(13)
同理可以證明,式(5)在時刻taj、tbj、tcj(j=1,2,…)是連續的。
對于結晶器實際振動位移超前期望信號等情況,可采用類似的方法證明式(5)的連續性,本文不再贅述。證畢。
根據推論1可知,結晶器角位移輸出誤差可以通過結晶器振動位移和期望位移及其導數的關系來確定。伺服電機角位移是單調遞增的,可以推出伺服電機角位移誤差:
Δθn=iΔθm
(14)
通過推論1可以看出,在非線性處理算法過程中,可以根據結晶器位移及其導數建立偏心軸角位移誤差與結晶器振動位移的映射關系。該算法涉及對結晶器位移求導。工業控制中,求導計算很難實現,且現場復雜環境容易對信號造成干擾,因此,需要構造含有濾波功能且不基于對象模型的微分器。為保證微分器的跟蹤性能和濾波性能,本文基于雙冪次函數設計了非線性微分器。
引理1 下面的系統相對于原點是有限時間收斂的:
(15)


農田是保證農民經濟收入的基礎,加強小型農田水利工程建設能夠保證農作物的增產和人畜飲水,從而促進農民經濟收入和農村經濟的發展,但我們也不能一味的追求經濟利益而忽略了賴以生存的生態環境,下面我們就現在小型農田水利工程中存在的問題進行分析并提出相關的方法以供農業部門的參考。
證明:
選擇Lipschitz連續的Lyapunov函數:
(16)
則有
(17)

給定任意實數σ>0和系數(c1,c2),假設存在常數g滿足如下方程:
(18)
則可以推出
(19)
由于c1,c2>0,且0<α1<1,0<α2<1,所以k<0,則系統平衡點(0,0)是全局有限時間穩定平衡點。
根據引理1可知,基于雙冪次函數設計的非線性微分器能夠保證在有效時間內跟蹤給定量,并同時得出數值的導數。
定理1 下面所示的非線性微分器:
(20)
對于二階連續可導的信號v(t),存在μ>0(其中,μα2>2)和Γ>0,當t>ξΓ時,滿足
x1-v(t)=O(ξμα2)

證明:


即
根據引理1可知,Lyapunov函數是Lipschitz連續的,則一定存在其Lipschitz常數CL[14],因此可得
D+(V°Z)(τ)=
v″(τ)]T]-[z2-a1sig(z1)α1-a2sig(z2)α2]T}≤

通過坐標變換,對于t>ξΓ,可得‖[e1ξe2]‖≤ξμα2pημ即|e1|≤ξμα2pημ,|e2|≤ξμα2-1pημ。


3 仿真和實驗
3.1 控制系統的仿真
為驗證本文所提非線性處理算法的有效性,首先采用仿真技術對系統的動態性能進行分析。利用MATLAB/Simulink搭建系統仿真模型,對比文獻[7]中基于分段函數的非線性處理方法,采用工業中常用的PID控制,分別對正弦和非正弦兩種給定信號進行了對比分析。
伺服電機驅動的連鑄結晶器振動試驗臺中機械部分參數如下:減速比i=5.114 5,結晶器振幅h=3 mm;永磁同步電機的參數:PN=20.4 kW,IN=45 A,nN=1 500 r/min,L=4.6 mH,ψf=0.96 Wb,B=0.004,Rs=0.14 Ω,p=3,J=0.054 7 kg·m2。微分器參數a1=a2=2,ξ=0.1,α1=0.4,α2=1.6。
系統整定后的直軸電流PID控制器參數Kp1=12.982 V/A,τ1=2 ms;交軸電流PID控制器的參數Kp2=12.982 V/A,τ2=2 ms;位置環PID控制器參數Kp3=200 V/A,τ3=100 ms。
(1)給定信號為正弦信號S*=hsinωt,其中,ω=πf/30;f為連鑄結晶器非正弦振動頻率;仿真中取f=13/6 Hz。正弦振動時,負載TL=(5.133 5+ 6.498 5sinωt)N·m。
結晶器啟動位置的不確定性使得結晶器存在一定的初始偏差,取初始時刻偏心軸機械零位偏移d=0.2rad。仿真結果如圖7所示。可以看出,與分段函數法相比,在控制器參數相同的情況下,本文方法具有較好的跟蹤效果,跟蹤精度較高,動態性能好。
(2)給定的位移信號為德馬克非正弦波形:
(b)位移跟蹤誤差曲線圖7 正弦信號時的結晶器軌跡及誤差曲線Fig.7 Mold tracking and tracking error curves with sine signal
非正弦振動的負載為
TL=(5.133 5+6.498 5sin(ωt-Asinωt))N·m
式中,σ為波形偏斜率。
仿真中取f=13/6 Hz,σ=0.24。初始時刻的偏心軸機械零位偏移為0.2 rad。仿真結果如圖8所示。可以看出,給定結晶器振動位移為非正弦波形時,本文的非線性處理算法在跟蹤速度和跟蹤精度方面優于分段函數處理算法,具有較好的控制效果。

(a)位移跟蹤軌跡曲線

(b)位移跟蹤誤差曲線圖8 非正弦信號時的結晶器軌跡及誤差曲線Fig.8 Mold tracking and tracking error curves with non-sinusoidal signal
3.2 控制系統的實驗
為驗證本文所提非線性處理算法的有效性,在連鑄結晶器振動實驗臺上進行了相關實驗。實驗平臺由數控部分和機械部分組成,如圖9所示。數控部分由西門子的S7-400PLC、FM-458等模塊和伺服驅動控制器S120組成,機械部分由減速器、連桿機構及連鑄結晶器振動臺組成。
1.伺服電機 2.減速器 3.聯軸器 4.偏心軸 5.連桿 6.結晶器振動臺 7.伺服驅動控制器 8.PLC圖9 伺服電機控制柜和連鑄結晶器振動臺Fig.9 Servo motor control cabinet and vibration platform of continues casting mold
連鑄結晶器振動位移控制系統中,伺服電機的電流環由西門子的伺服驅動器S120通過PI控制實現,PI控制器參數可通過S120伺服驅動器自整定。在此基礎上,利用本文提出的非線性處理算法對結晶器實際位移跟蹤值做映射處理,設計位移環PI控制器。在裝有西門子Step7軟件的PC機上編寫數據采集程序,結晶器的位移通過位移傳感器采集到PLC,再上傳到上位機中進行處理,通過WinCC監控畫面顯示。
圖10所示為結晶器振動期望軌跡為正弦信號時,閉環控制下結晶器振動位移和速度曲線,圖中曲線分別為結晶器正弦振動時的期望軌跡與相應的實際曲線。通過圖10可以看出,基于本文非線性處理算法的PI閉環控制能夠有效減小結晶器初始相位偏差并將其保持在一定的范圍內,實現結晶器振動位移的漸近跟蹤控制,表明期望軌跡為正弦信號時,所設計非線性處理算法有效。
圖11所示為結晶器振動期望軌跡為非正弦信號時,閉環控制下結晶器振動位移和振動速度曲線,圖中曲線分別為結晶器非正弦振動時的期望軌跡與相應的實際曲線。通過圖11可以看出,采用非線性處理的PI閉環控制可以實現非正弦情況下結晶器振動位移的跟蹤控制,表明所設計的非線性處理方法可以有效解決周期函數逆解不唯一的問題。
4 結論
本文通過建立偏心軸轉角誤差與結晶器振動位移之間的非線性映射函數關系,來保證伺服電機轉角與結晶器振動位移非線性關系的唯一性,并通過設計的PID控制器來驗證非線性處理方法的有效性。分別采用MATLAB仿真及伺服電機驅動的連鑄結晶器振動實驗臺,對正弦和非正弦位移給定信號進行實驗研究。仿真結果表明,與分段函數方法相比,基于本文非線性處理算法設計的PID控制器在跟蹤速度和精度上均有提高,實驗結果表明所設計的方法有效。

(a)位移跟蹤曲線

(b)速度跟蹤曲線圖10 結晶器正弦振動時的位移和速度曲線Fig.10 Mold displacement and velocity curves under sine vibration

(a)位移跟蹤曲線

(b)速度跟蹤曲線圖11 結晶器非正弦振動時的位移和速度曲線Fig.11 Mold displacement and velocity curves under non-sinusoidal vibration
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00