基于機器視覺的運矸車輛車載圖像識別技術(shù)研究
2019-07-09 23:33:04牛世琛
時代汽車 2019年6期
關(guān)鍵詞:機器視覺
牛世琛


摘 要:近年來機器視覺和人工智能相關(guān)技術(shù)快速發(fā)展,汽車領(lǐng)域應(yīng)用尤其是一個熱點,相對于乘用車領(lǐng)域,特種車輛的機器視覺也是其中一個重要的發(fā)展方向。本文研究了一種基于機器視覺的運矸車輛車載圖像識別技術(shù)。介紹了車載視覺系統(tǒng)的搭建過程和前期標定準備,其次介紹了物體樣本采集,敘述了樣本的圖像濾波、輪廓提取、特征選擇等圖像處理方案,最后,采用支持向量機配合合適的核函數(shù)及參數(shù)完成樣本的訓(xùn)練識別并進行測試,證實技術(shù)方案的有效性。
關(guān)鍵詞:特種車輛;機器視覺;圖像識別;矸石分揀
近年來,機器視覺技術(shù)得到較快發(fā)展。機器視覺作為一種先進技術(shù),在汽車設(shè)計、無人駕駛等領(lǐng)域有了越來越廣泛的應(yīng)用,車載視覺技術(shù)不斷地優(yōu)化發(fā)展,越來越成熟。汽車領(lǐng)域主要分為乘用車和特種車輛兩大領(lǐng)域,乘用車領(lǐng)域?qū)τ谝曈X技術(shù)的應(yīng)用主要集中在無人駕駛方面,而特種車輛除了在自動駕駛方面對機器視覺有所需求,車輛一般還有額外功能,這些功能也急需視覺技術(shù)來優(yōu)化。對于煤礦生產(chǎn)中使用的特種車輛,例如運矸車輛,其需要對煤與矸石進行識別分類,將矸石識別揀出并收集到運矸車輛的車箱中。目前揀矸操作主要由人工分揀,隨著特種車輛設(shè)計優(yōu)化和機器視覺技術(shù)的發(fā)展,基于機器視覺的運矸車輛設(shè)計趨勢初現(xiàn),特種車輛加載機器視覺技術(shù)形成智能車輛,符合“汽車智能化”的發(fā)展趨勢。本文針對運矸車輛車載圖像識別技術(shù)進行了介紹,闡述了一種車載視覺系統(tǒng)搭建過程并進行了實驗效果驗證。
1 車載視覺系統(tǒng)搭建與標定
1.1 工業(yè)相機選型
本文車載視覺系統(tǒng)的目標識別物體即煤塊與矸石在顏色屬性上差別極小,依靠顏色辨別煤塊與矸石的可行性微乎其微。綜合查詢市面上工業(yè)相機,本文選擇Teledyne Dalsa公司的Genie Nano M2590工業(yè)相機。這款相機的特點在于出眾的性價比、超小體積的外觀設(shè)計、超低的延遲和精準的定時功能,在具有機器視覺的智能系統(tǒng)和檢測裝置、智能交通、物流運輸?shù)壬a(chǎn)生活領(lǐng)域具有廣泛的應(yīng)用。
1.2 光學(xué)鏡頭選型
鏡頭選擇51CAMERA公司代理的VS1614-10M光學(xué)鏡頭,本鏡頭是VST出產(chǎn)的面向機器視覺行業(yè)設(shè)計的鏡頭,優(yōu)點是采集的圖像畸變較小,可以在很大范圍內(nèi)調(diào)整成像距離而依舊保持成像清晰,設(shè)計結(jié)構(gòu)小巧,尺寸緊湊,安裝十分靈活,與Genie Nano M2590工業(yè)相機搭配使用效果良好。
1.3 相機標定實驗
1.3.1 車載視覺系統(tǒng)的成像畸變現(xiàn)象
車載視覺系統(tǒng)采集圖像時由于原理上固有的失真造成了成像中畸變。畸變主要有三種類型:由于透鏡生產(chǎn)過程徑向曲率加工誤差導(dǎo)致的枕形畸變和桶形畸變、由于拍攝角度使物體產(chǎn)生“進大遠小”等失真的線性畸變。線性畸變在自動駕駛汽車研究中非常常見。
1.3.2 標定流程
相機標定方法從原理上分為兩種方法:一種是采用特定標定樣式的已知標定物,通過采集多張圖片,建立標定物上已知點與采集圖像中點的對應(yīng)關(guān)系完成標定流程,稱為傳統(tǒng)相機標定方法;另一種標定法是相機自標定法,這種方法不需要使用標定模板,只要以視野中的某一點作為參考,相機進行特定的移動,從而完成標定流程[1]。綜合上述兩種標定法的優(yōu)缺點,采用傳統(tǒng)標定法中的張正友標定法配合國際棋盤格標定板,這種方法的標定模板成本低廉,標定流程方便快捷。
根據(jù)標定結(jié)果可以得出本文所選所選相機及鏡頭圖像畸變區(qū)域小,而煤塊與矸石尺寸大,在對精度要求不高的情況下,本文把所選工業(yè)相機成像過程近似為線性相機模型[2]。
2 車載視覺系統(tǒng)的圖像處理技術(shù)
本文車載視覺系統(tǒng)在圖像處理方案上采用如下步驟進行處理:待識別物體數(shù)據(jù)采集、數(shù)據(jù)預(yù)處理、預(yù)定特征參數(shù)的計算、待識別物體分類與識別。
2.1 車載視覺系統(tǒng)的圖像濾波
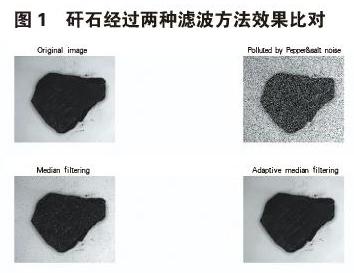
本文選取樣本中一塊矸石圖像,對其加載椒鹽噪聲,分別用中值濾波算法和自適應(yīng)中值濾波算法進行處理,輸出結(jié)果并比較,結(jié)果如圖1所示。
左上角圖像為原始矸石圖像,右上角圖像為被噪聲污染之后的矸石圖像,左下角為中值濾波處理的圖像結(jié)果,右下角為自適應(yīng)中值濾波處理得到的圖像結(jié)果。對比下方左右兩幅圖片可以發(fā)現(xiàn),自適應(yīng)中值濾波處理過的圖像噪聲基本消除,中值濾波處理的矸石圖像仍然殘留不少噪聲點,而這不利于后期對矸石和煤的特征參數(shù)進行提取,會影響煤矸石識別分類的準確性。
2.2 車載視覺系統(tǒng)的輪廓提取
本文選取濾波處理的樣本圖像,對其分別用Roberts算子、Sobel算子、Canny算子進行輪廓提取。從處理結(jié)果看出,Roberts算子方法與Sobel算子方法處理結(jié)果較好,Canny算子因為在輪廓提取中非常靈敏,反而被過多的背景信息干擾,而Roberts算子和Sobel算子都提取到了輪廓,效果基本相同,所以最終選擇卷積核更小,運算量較小的Roberts算子方法得到物體輪廓。
2.3 車載視覺系統(tǒng)的圖像剪裁
從提取出物體輪廓的圖像中可以很容易地求得物體的形心坐標。求得形心之后,對圖像進行剪裁,保留一塊以形心為中心的方形圖像,圖像的尺寸對應(yīng)現(xiàn)實中矸石的尺寸大致為100毫米x100毫米,如圖2所示。
進行圖像剪裁有如下兩個作用:1)根據(jù)現(xiàn)場調(diào)研物體尺寸在300毫米到1.5米之間,以形心為中心進行剪裁邊長100毫米的方塊,可以保證剪裁出的圖像全部對應(yīng)煤或者矸石的表面,沒有其他干擾信息;2)由于相機選型時需要分辨率較高,圖像像素個數(shù)極多,直接進行圖像分析增加了計算機的負擔(dān),減弱了圖像處理實時性,而車載系統(tǒng)搭載的上位機性能有限,因此裁剪圖像保留了關(guān)鍵特征,摒棄了冗余部分,提高了計算機處理的快速性。
2.4 車載視覺系統(tǒng)的圖像特征提取
綜合各種特征屬性和現(xiàn)場工人經(jīng)驗,本文選定了煤和矸石的幾種灰度特征作為分辨識別的依據(jù)。灰度直方圖是統(tǒng)計一個圖片中每個像素點灰度級分布的圖形化表示方法。統(tǒng)計每個像素點灰度值落在直方圖橫坐標的位置,將每個灰度值處對應(yīng)的像素點出現(xiàn)的次數(shù)或者頻率作為每個灰度值處的縱坐標大小,生成灰度直方圖。只從圖形化的直方圖中可以看出一張圖片所有像素點灰度分布的趨勢,但是不方便計算機處理,因此引入一些統(tǒng)計學(xué)參數(shù)對直方圖的特征進行衡量,將直方圖包含的信息轉(zhuǎn)化為各種參數(shù),方便計算機分析處理。本文引入?yún)?shù)如下[3]:
本文對于煤和矸石的樣本圖像分別進行灰度均值、灰度方差的計算。得到處理后的煤塊的圖像灰度均值大致位于80~100之間,灰度方差大致位于1300~1700之間;經(jīng)過處理后的矸石的圖像灰度均值大致位于100~170之間,灰度方差大致分布于1500~2200之間。
2.5 車載視覺系統(tǒng)的目標分類
本文選取了支持向量機方法和選取了合適的核函數(shù)之后,實驗測試煤與矸石的分類效果:收集了20張煤與矸石的圖像數(shù)據(jù),其中煤8張,矸石12張,依次進行圖像處理,計算灰度均值和方差,并分類輸出結(jié)果如表1所示。
3 結(jié)語
本文設(shè)計了一種特種車輛即運矸車輛搭載的視覺系統(tǒng)以及圖像處理方法,選取了合適的特征參數(shù)制定了處理流程。
通過研究國內(nèi)外研究成果并結(jié)合實驗經(jīng)驗,提出了圖像先剪裁再處理的方法,只保留特征豐富的優(yōu)質(zhì)區(qū)域進行特征提取,縮減了計算機算法的執(zhí)行時間,提高了本方案的實時性。
采集了若干煤塊與矸石的樣本照片,設(shè)立了樣本庫,采用支持向量機方法以樣本庫圖片建立分類器,并對其進行煤與矸石分類識別的測試。
參考文獻:
[1]王芳榮.基于機器視覺的工業(yè)機器人分揀系統(tǒng)研究[D].長春:吉林大學(xué),2007:53-55.
[2]J.Y.Son,S.Yeom,D.S.Lee,K.H.Lee,M.C.Park,“A Stereoscopic Camera Model of Focal Plane Detector Array”,in Journal of Display Technology,2011,7(05):281-288.
[3]RafaclC.Gonzalez,RichardE.Woods,Gongzalez.數(shù)字圖像處理(第二版)[M].北京:電子工業(yè)出版社,2007.
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
