基于UM的磁浮列車-軌道梁耦合振動仿真程序開發
2019-07-09 00:00:00德米特里·波戈列洛夫雷強根納季·米克希夫亞歷山大·羅迪科夫
計算機輔助工程 2019年1期
關鍵詞:振動
德米特里·波戈列洛夫 雷強 根納季·米克希夫 亞歷山大·羅迪科夫

摘要:基于大型通用多體動力學仿真分析平臺Universal Mechanism(UM),開發用于磁浮列車-軌道梁耦合振動仿真的專用程序UM Maglev,其中:磁浮列車設置為多剛體模型,彈簧和阻尼器的剛度和阻尼視為線性或非線性力元;軌道梁設置為三維鐵木辛柯梁模型,或從外部有限元軟件導入模態分析結果;軌道線路包含平面和縱斷面曲線、超高和軌面隨機不平順;懸浮和導向系統控制采用PID模型;多體動力學系統微分-代數方程求解采用Park剛性穩定法。該程序可用于考察磁浮列車的曲線通過性能、運行平穩性和乘坐舒適度,研究懸浮/導向氣隙與磁浮控制系統參數優化,分析軌道梁在動態電磁力作用下的振動響應。
關鍵詞:磁浮列車;軌道;振動;耦合;多體動力學;數值積分
中圖分類號:U237;U441.7
文獻標志碼:B
文章編號:1006-0871(2019)01-0028-08
0 引 言
磁浮交通具有磨耗小、噪聲低、曲線通過和爬坡能力強等優點,既適用于城市軌道交通(中低速),又適用于國內/國際干線交通(高速),有良好的發展前景。目前,國內外的磁浮線主要有電磁懸浮(electromagnetic suspension, EMS)和電動懸浮(electrodynamic suspension, EDS)2種制式。德國的Transrapid、日本的HSST、韓國的UTM和中國的CMS系列均為EMS型。這種類型的磁浮列車需要施加主動控制以實現穩定懸浮。磁浮軌道一般采用高架橋方式,列車以一定速度通過軌道梁會引發梁的振動,梁的振動又會影響列車系統,甚至會發生共振,不僅影響乘坐舒適度,而且不利于軌道梁的安全,因此有必要開展磁浮列車-軌道梁系統耦合振動的研究。[1-10]
ZHAI等[11]基于MATLAB平臺建立上海高速磁浮線TR08型磁浮車輛與高架磁浮軌道耦合動力學模型,其中:車輛為多剛體模型,共計133個自由度;磁浮控制系統為基于“位移-速度-加速度”反饋的單電磁鐵比例-積分-微分(proportion-integral-derivative,PID)控制模型;磁浮軌道為“歐拉-伯努利”梁模型,未考慮軌道梁的剪切和扭轉效應。梁鑫等[12]基于SIMPACK平臺建立高速磁浮車輛多剛體動力學模型和基于“位移-速度-加速度”反饋的單電磁鐵PID控制模型,并將ANSYS計算得到的軌道梁模態導入到SIMPACK中,但其模態計算方法為縮減法,采用主自由度計算特征值和特征向量,只能生成近似的質量矩陣,導致系統總質量損失,精度受使用者選擇的主自由度數目和位置影響較大。劉德軍等[13]和李小珍等[14]基于自主研發的車橋耦合振動分析軟件VRBIM和VTBIM建立中低速磁浮車輛-控制器-橋梁耦合動力學模型,車輛為多剛體模型,橋梁為有限元模型,控制系統為基于“位移-速度”反饋的比例-微分(proportion-derivative,PD)控制模型,未考慮加速度反饋,分析磁浮車橋系統的垂向動力,未分析磁浮車橋系統的橫向耦合作用。
自1985年起,德米特里·波戈列洛夫開始研發大型通用多體動力學仿真分析平臺Universal Mechanism(UM),然后帶領團隊經過30多年的持續研究,陸續開發鐵道機車車輛、公路車輛、履帶車輛、單軌列車、輪軌磨耗、剛柔耦合、車橋耦合、疲勞耐久性、滾動接觸疲勞、柔性軌道和柔性輪對等20多個專業動力學分析模塊,其中大部分應用于軌道交通領域。本文基于現有的單軌列車、柔性軌道和剛柔耦合等模塊,開發磁浮交通專用模塊UM Maglev,聯合多體動力學、有限元法和現代控制理論,可實現磁浮列車-軌道梁耦合振動仿真。
1 磁浮列車-軌道系統動力學模型
工程研究的對象一般可分為機構和結構兩大類。諸如汽車、履帶車輛、機車車輛和磁浮列車等,具有大范圍運動特征的系統,通常由復雜的機械構件和彈性元件組成,構件之間有明顯的相互運動,此類系統為機構。對于機構的動力學性能研究,最有效的辦法是采用多剛體方法建立數學模型。另如橋梁、建筑和隧道等本身不發生或不需要研究其大范圍運動的系統,通常其系統剛度、強度和穩定性為關注點,此類系統為結構。對于結構的力學性能研究,一般采用有限元法建立數學模型,如巡線機器人、無人駕駛汽車、智軌列車和磁浮列車等系統,均采用復雜的主動控制技術,以實現系統的自動啟停、導向、平衡和調節。若要研究此類系統的動力學行為,必須建立控制系統模型。因此,磁浮列車-軌道耦合動力學仿真研究必須聯合使用多剛體方法、有限元法和自動控制理論。
1.1 磁浮列車多體系統模型
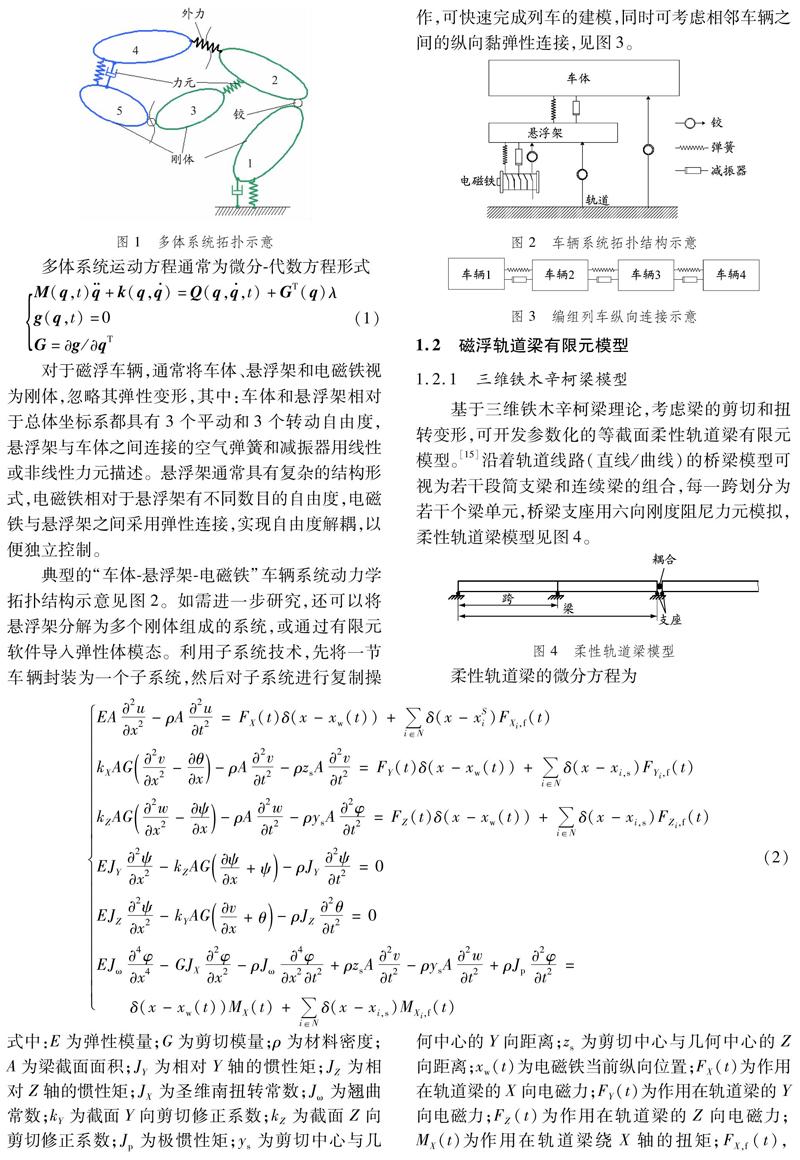
在動力學范疇,剛體是高度抽象的概念,用于表示變形可忽略不計的物體,實則是一個連續分布的質點系。在運動過程中,剛體上任意兩點間的距離保持不變。剛體的輸入參數為質量、轉動慣量和質心坐標。多個剛體通過鉸或力元有序連接,形成多剛體系統,多體系統拓撲示意見圖1。鉸用于描述兩個剛體的相對運動關系,如平動和轉動。力元用于描述系統內的彈性元件,如鋼彈簧、空氣彈簧、減振器、牽引拉桿和抗側滾扭桿等。這些元件都有一定的剛度和阻尼特性,往往具有較大的彈性變形,對系統的動力學性能影響較大,不能視為剛體。
對于磁浮車輛,通常將車體、懸浮架和電磁鐵視為剛體,忽略其彈性變形,其中:車體和懸浮架相對于總體坐標系都具有3個平動和3個轉動自由度,懸浮架與車體之間連接的空氣彈簧和減振器用線性或非線性力元描述。懸浮架通常具有復雜的結構形式,電磁鐵相對于懸浮架有不同數目的自由度,電磁鐵與懸浮架之間采用彈性連接,實現自由度解耦,以便獨立控制。
典型的“車體-懸浮架-電磁鐵”車輛系統動力學拓撲結構示意見圖2。如需進一步研究,還可以將懸浮架分解為多個剛體組成的系統,或通過有限元軟件導入彈性體模態。利用子系統技術,先將一節車輛封裝為一個子系統,然后對子系統進行復制操
作,可快速完成列車的建模,同時可考慮相鄰車輛之間的縱向黏彈性連接,見圖3。
1.2 磁浮軌道梁有限元模型
1.2.1 三維鐵木辛柯梁模型
基于三維鐵木辛柯梁理論,考慮梁的剪切和扭轉變形,可開發參數化的等截面柔性軌道梁有限元模型。[15]沿著軌道線路(直線/曲線)的橋梁模型可視為若干段簡支梁和連續梁的組合,每一跨劃分為若干個梁單元,橋梁支座用六向剛度阻尼力元模擬,柔性軌道梁模型見圖4。
1.2.2 外部導入模態
對于復雜的橋梁和軌道結構,可在有限元軟件中建立實體/板殼單元模型,通過Craig-Bampton固定界面模態綜合法進行自由度縮減,以彈性子系統的形式導入,與多剛體系統組建剛柔耦合系統,進行動力學分析。模態計算采用分塊Lanczos或子空間迭代法,無須選擇主自由度,采用完整的剛度矩陣和質量矩陣,計算精度較高。[16]
假設彈性體的微小變形可由一組模態坐標來表示,則
根據Craig-Bampton方法,模態矩陣是一系列主模態(固有模態)和約束模態(靜模態)的線性組合。對于已經劃分好網格的有限元模型,模態綜合主要分為以下步驟:
(1)選擇Ni個界面(邊界/交互)節點,見圖5。這些節點通常位于與外部其他物體連接處,如橋梁支座。
(2)將Ni個界面節點的6個自由度全部約束,計算主模態(見圖6),指定模態階數Ne。主模態[WTHX]y[WTBX]的計算式為
(3)依次給定每個界面節點每個自由度方向單位位移,同時保持其余界面節點為全約束狀態,計算約束模態(見圖7),共6Ni階。
(4)剔除6階剛體模態,計算廣義質量矩陣和剛度矩陣,進行模態正交歸一化,最終模態階數為
H=6Ni+Ne-6。
某曲線軌道梁連續兩跨自由模態見圖8。該梁跨距30 m,采用六面體劃分網格,單元總數為77 403個,節點總數為90 601個,界面節點3個。在有限元軟件中提取80階主模態和18階約束模態,正交歸一化后為92階自由模態,對應92個自由度。
1.3 磁浮控制模型
由于EMS型磁浮車輛靠吸引力懸浮,系統本身不能自穩,必須加入主動控制。一般可通過多體系統動力學計算獲得位移、速度和加速度等變量結果,輸出給控制系統,經運算得到電磁力,再反饋給多體系統[17]:如此反復迭代。自動控制原理見圖9。
1.3.1 彈簧阻尼控制模型
彈簧阻尼控制模型是最簡單的線性控制模型,常用于磁浮車輛系統線性分析,以獲得系統的固有頻率和特征值。彈簧阻尼控制模型方程為
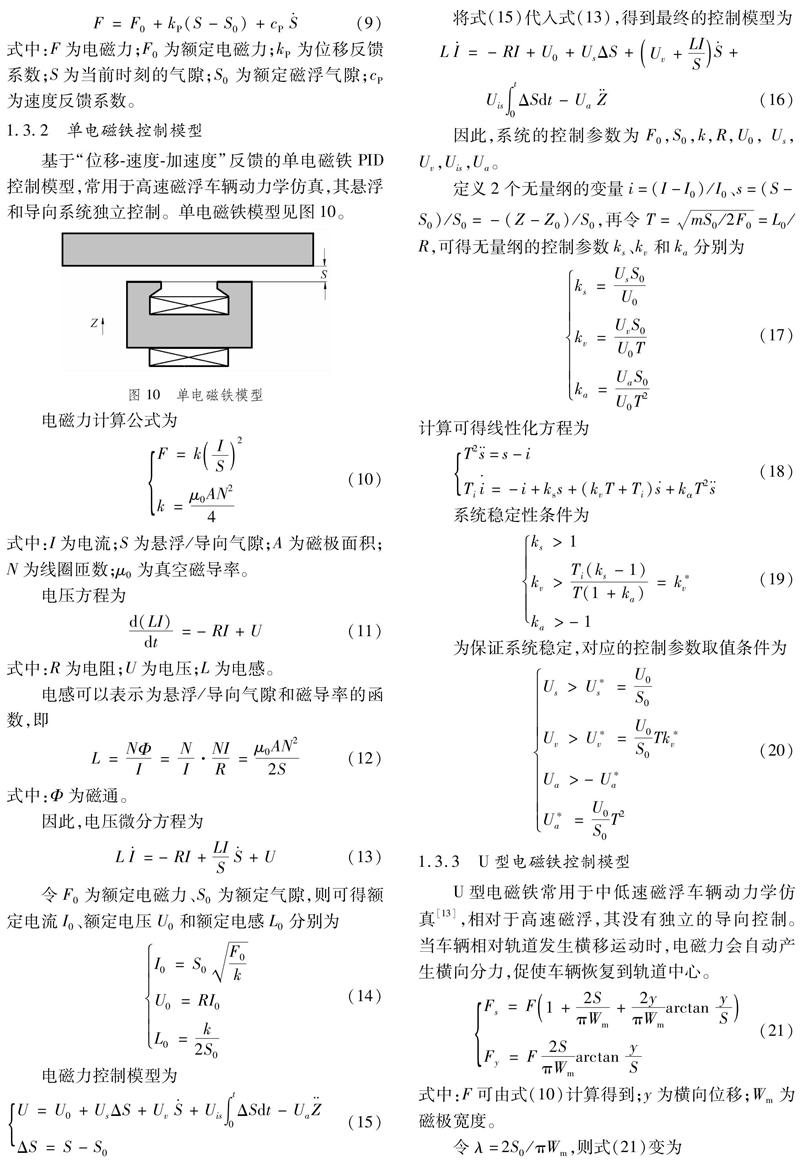
1.3.2 單電磁鐵控制模型
基于“位移-速度-加速度”反饋的單電磁鐵PID控制模型,常用于高速磁浮車輛動力學仿真,其懸浮和導向系統獨立控制。單電磁鐵模型見圖10。
1.3.3 U型電磁鐵控制模型
U型電磁鐵常用于中低速磁浮車輛動力學仿真[13],相對于高速磁浮,其沒有獨立的導向控制。當車輛相對軌道發生橫移運動時,電磁力會自動產生橫向分力,促使車輛恢復到軌道中心。
1.3.4 外部導入控制模型
對于更加復雜的控制模型,可使用專業的自動控制仿真程序UM Block Editor或MATLAB/Simulink建模,與UM軟件實現聯合仿真,外部控制系統模型見圖11。
2 磁浮大系統耦合及求解
磁浮大系統由列車子系統、軌道梁子系統和控制子系統等3部分組成,其中:軌道梁分為剛性區段和柔性區段,仿真初始時將列車全部置于剛性區段。磁浮列車-軌道梁耦合模型見圖12,軌道梁截面相關特性見文獻[18]。
在進行磁浮大系統耦合動力學仿真計算時,除建立軌道線路的宏觀幾何模型(平面和縱斷面曲線)外,還需要考慮微觀的軌面不平順[19],其幅值通常是幾毫米。
一般可根據功率譜密度函數反演得到空間的不平順樣本,也可采用實測數據。某軌面隨機不平順樣本見圖13,S計算公式為
當列車運行至柔性軌道梁段時,電磁力作用于軌道梁,程序自動搜尋附近的控制區域,并將電磁力分解到控制區域的幾個節點上,然后將節點位移和速度以不平順激勵形式反饋給列車控制系統,電磁力的傳遞見圖14。
采用著名的Park剛性穩定法對系統進行積分求解。Park方法是一種具有“預估-校正”格式的隱式變步長算法。剛柔耦合系統往往出現大量的剛性(病態)微分-代數方程,Park方法是求解此類方程最有效的積分方法之一。[20-21]
磁浮列車驅動可采用一般多體軌道車輛仿真技術,即賦予列車一定初速度(如車-橋耦合研究),也可建立復雜的驅動機構,與電磁學、控制理論聯立,研究磁浮列車驅動等。
某高速磁浮列車-軌道梁耦合動力仿真過程見圖15,跟隨電磁鐵的曲線軌道梁位移曲線見圖16。
3 軟件模型驗證
為驗證軟件的正確性,以文獻[22-24]中的中低速磁浮列車為例,建立考慮F軌、鋼軌枕和軌道的中低速磁浮列車-軌道梁耦合動力分析模型。車輛、F軌、鋼軌枕、軌道梁等參數詳見文獻[22-24]。當列車速度為80 km/h時,橋梁跨中豎向位移、橋梁跨中豎向振動加速度、車體前端豎向振動加速度仿真結果與實測對比分別見圖17~19。由此可知,程序仿真計算與文獻實測數據吻合較好。
4 結束語
UM Maglev融合多體動力學、有限元法和現代控制理論,可建立完整的“磁浮列車-軌道梁”耦合動力學系統,具有良好的通用性和可擴展性。借助Park剛性穩定法,可高效精確地求解系統的微分-代數方程,獲得列車與軌道梁的動力學響應。該程序可用于研究磁浮列車的曲線通過性能、運行平穩性和乘坐舒適度,進行懸浮氣隙與磁浮控制系統參數優化,以及軌道梁在動態電磁力作用下的振動響應分析。
參考文獻:
[1] MEISENHOLDER S G, WANG T C. Dynamic analysis of an electromagnetic suspension system for a suspended vehicle system[EB/OL]. (1973-03-09)[2018-08-01]. https://trid.trb.org/view.aspx?id=7743.
[2] NAGURKA M L, WANG S K. A superconducting maglev vehicle/guideway system with preview control[J]. Journal of Dynamic Systems, Measurement, and Control, 1997, 119(4):638-649. DOI:10.1115/1.2802372.
[3] REN S, ROMEIJN A, KLAP K. Dynamic simulation of maglev vehicle/guideway system[J]. Journal of Bridge Engineering, 2010, 15(3):269-278. DOI:10.1061/(ASCE)BE.1943-5592.0000071.
[4] HGELE N, DIGNATH F. Vertical dynamics of maglev vehicle transrapid[J]. Multibody System Dynamics, 2009, 21(3):213-231. DOI:10.1007/s11044-008-9136-0.
[5] GOTTZEIN E, MEISINGER R, MILLER L. “Magnetic wheel” in suspension of high-speed ground transportation vehicles[J]. IEEE Transactions on Vehicular Technology, 1980, 29(1):17-23. DOI:10.1109/T-VT.1980.23817.
[6] SHEN G, MEISINGER R, SHU G. Modelling of a high-speed maglev train with vertical and lateral control[J]. Vehicle System Dynamics, 2008, 46(S1):643-651. DOI:10.1080/00423110802033056.
[7] BRZEZINA W, LANGERHOLC J. Lift and side forces on rectangular pole pieces in two dimensions[J]. Journal of Applied Physics, 1974,45(4): 1869-1872. DOI:10.1063/1.1663505.
[8] ZHAO C F, ZHAI W M, WANG K Y. Dynamic responses of low-speed maglev vehicle on curved guideway[J]. Vehicle System Dynamics, 2002, 38(3):185-210.
[9] MIN D J, LEE J S, KIM M Y. Dynamic interaction analysis of actively controlled maglev vehicles and guideway girders considering nonlinear electromagnetic forces[J]. Journal of Korean Society of Civil Engineers Magazine, 2012, 1(1):39-57. DOI:10.12989/csm.2012.1.1.039.
[10] DELLNITZ M, DIGNATH F, FLAKAMP K, et al. Modelling and analysis of nonlinear dynamics of transrapid and its guideway[C]//Proceedings of Progress in Industrial Mathematics at ECMI 2010. Berlin:Springer, 2012:113-123. DOI:10.1007/978-3-642-25100-9_14.
[11] ZHAI W M, ZHAO C F, CAI C B. Dynamic simulation of EMS maglev vehicle-guideway-controller coupling system[EB/OL]. (2004-12-31)[2018-08-01]. http://www.maglev.ir/eng/documents/papers/conferences/maglev2004/topic5/IMT_CP_M2004_T5_15.pdf.
[12] 梁鑫, 羅世輝, 馬衛華, 等. 磁浮列車單鐵懸浮車橋耦合振動分析[J]. 交通運輸工程學報, 2012, 12(2):32-37.
[13] 劉德軍, 李小珍, 洪沁燁, 等. 中低速磁浮列車-大跨度連續梁耦合振動研究[J]. 鐵道工程學報, 2017, 34(9):53-57.
[14] 李小珍, 洪沁燁, 耿杰, 等. 中低速磁浮列車-軌道梁豎向耦合模型與驗證[J]. 鐵道工程學報, 2015, 32(9):103-108.
[15] KNOTHE K L, GRASSIE S L. Modelling of railway track and vehicle-track interaction at high frequencies[J]. Vehicle System Dynamics, 1993, 22(3-4):209-262. DOI:10.1080/00423119308969027.
[16] RICCARDO F. A numerical program for railway vehicle-track-structure dynamic interaction using a modal substructuring approach[D]. Reggio Calabria:University of Reggio Calabria, 2013.
[17] GOTTZEIN E, LANGE B. Magnetic suspension control systems for MBB high speed train[J]. Automatica, 1973, 11(3):271-284. DOI:10.1016/0005-1098(75)90043-6.
[18] 劉華清, 李志業, 任恩恩. 德國磁懸浮列車Transrapid[M]. 成都:電子科技大學出版社, 1995.
[19] SHI J, FANG W S, WANG Y J, et al. Measurements and analysis of track irregularities on high speed maglev lines[J]. Journal of Zhejiang University:Science A:Applied Physics & Engineering, 2014, 15(6):385-394. DOI:10.1631/jzus.A1300163.
[20] PARK K C. An improved stiffly stable method for direct integration of nonlinear structural dynamic equations[J]. Journal of Applied Mechanics, 1975, 42(2):464-470. DOI:10.1115/1.3423600.
[21] POGORELOV D. Differential-algebraic equations in multibody system modeling[J]. Numerical Algorithms, 1998, 19(1):183- 194. DOI:10.1023/A:1019131212618.
[22] 耿杰, 王黨雄, 李小珍, 等. 中低速磁浮列車-簡支梁系統耦合振動試驗研究[J]. 鐵道學報, 2018, 40(2):117-124. DOI:10.3969/j.issn.1001-8360.2018.02.016.
[23] 謝海林. 中低速磁浮交通系統工程化應用:長沙磁浮快線[M]. 北京:中國鐵道出版社, 2018.
[24] LI X Z, WANG D X, LIU D J, et al. Dynamic analysis of interactions between a low-to-medium-speed maglev train and a bridge:Field test results of two typical bridge[C]// Proceedings of Institution of Mechanical Engineers:Part F:Journal of Rail and Rapid Transit, 2018, 232(7):1-21. DOI:10.1177/0954409718758502.
(編輯 武曉英)
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00