擴張?伸縮式機器人在腸道中的運動效率研究
2019-07-08 05:33:51賀術顏國正
現代電子技術 2019年13期
賀術 顏國正


摘 ?要: 具備自主運動能力的腸道機器人內窺鏡是腸道疾病診療設備的發展方向,文中研究一種擴張?伸縮式機器人內窺鏡在腸道中的運動效率并提出提高運動效率的方法。計算了擴張?伸縮式機器人的運動效率,研究了駐留失效導致的步距損失,同時提出腸道壓縮和拉伸模型分析腸道變形導致步距損失出現的原因。離體實驗結果表明,設計的擴張?伸縮式機器人在離體腸道中的運動效率在34.2%~63.7%,實際運行速度在0.62~1.29 mm/s,機器人在腸道中的運動效率隨著運動步態之間的時間間隔的增加而提高。通過研究發現,增強機器人擴張機構在腸道內的駐留能力是提高運動效率的關鍵,同時也提出提高運動效率的方法。文中的模型能對胃腸道機器人的設計提供參考。
關鍵詞: 胃腸道; 機器人; 運動效率; 擬態; 內窺鏡; 生物力學
中圖分類號: TN98?34 ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2019)13?0146?06
Research on locomotion efficiency of an expanding?extending robot in intestinal tract
HE Shu1, YAN Guozheng2
(1.The Thirty?Second Institute of China Electronics Technology Group Corporation, Shanghai 201800, China;
2.School of Electronic Information and Electronical Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
Abstract:The intestinal tract robotic endoscope with ability to move autonomously is the development direction of the intestinal disease diagnosis and treatment equipment. The locomotion efficiency of the expanding?extending robotic endoscope moving in the intestinal tract is researched and the way for improving its locomotion efficiency is proposed in this paper. The locomotion efficiency of the expanding?extending robot is calculated, and the step?size loss caused by lingering failure is researched. The reasons of occurring as the step?size loss caused by intestinal tract variant are analyzed by means of intestinal tract expression and Tensile model. The results of the vitro experiment show that the locomotion efficiency of the expanding?extending robot moving in vitro intestinal tract is between 34.2% and 63.7%, the actual locomotion speed is between 0.62 mm/s to 1.29 mm/s. The locomotion efficiency is improved with the increase of the time interval between locomotion gaits. It is found in the research that the key to improve the locomotion efficiency of the robot is to enhance the lingering ability of expanding mechanism of the robot in the intestine tract. Some methods to improve the locomotion efficiency of the robot are presented in this paper. The model proposed in this paper can provide a reference for the design of gastrointestinal robot.
Keywords: gastrointestinal tract; robot; locomotion efficiency; mimesis; endoscope; biomechanics
0 ?引 ?言
作為一種現代社會常見的疾病,胃腸道疾病的特征是較高的發病率以及較長的潛伏時間,早發現和早治療是應對這類疾病的最好方式[1]。但是現有的腸胃道內窺鏡檢查會給人帶來痛苦,這給此類疾病的大面積篩查造成阻礙。近年來,許多研究機構和組織致力于開發解決這些問題的替代方案,如以色列Given Imaging公司開發了型號為M2A的膠囊內窺鏡,這種內窺鏡只有膠囊的大小,可以在消化道中隨著蠕動行進,它可以捕捉消化道內實時的圖像信息并傳送至外部接收器[2]。這種設備的行進依賴于消化道蠕動,自主運動功能的缺失導致這類檢查存在一定的漏檢率。
近年來,具備自主運動能力的胃腸道機器人內窺鏡成為研究熱點[3?8]。這些設備可以自主地在消化道內運動,是傳統胃腸道內窺鏡最有前景的替代方案之一。文獻[9]開發了一種機器人內窺鏡,機器人的兩端都有一組腿,通過兩組腿的配合使機器人在腸道內行進。文獻[10]研發了一種由外部磁場驅動的機器人內窺鏡,通過一個外部的手持永磁設備與機器人體內的磁場相互作用使機器人在胃部移動。文獻[11]開發了一種機器人內窺鏡,該機器人擁有一組腿式機構用于擴張腸道,并通過內部和外部磁場的相互作用驅動裝置在消化道內運動。然而,對于所有的驅動類型來說,如何適應腸道以產生高效的運動是最重要的問題[12]。
目前已經開發出了一系列基于體內驅動方式的機器人內窺鏡[13?17]。本文利用擴張?伸縮式機器人樣機研究了機器人內窺鏡在腸道中的運動效率。在分析機器人在腸道內運動的基礎上,計算每個步態周期的運動效率,并建立模型分析腸道與機器人之間的駐留機理。模型考慮了機器人運動過程中腸道的擴張和延伸,并進行相關的效率計算。最后進行一系列離體實驗,并結合理論模型對機器人的實際運動效率進行分析。
1 ?胃腸道機器人在腸道中的運行效率
為了適應腸道的特殊結構,設計一種擴張/伸縮式機器人來實現在腸道內的自主運動。機器人的運動基于尺蠖的運動原理,樣機如圖1所示。機器人擁有前后兩組徑向擴張機構以及一組軸向伸縮機構,徑向擴張機構在擴張后(如圖1b)所示)可以實現機器人在腸道內的駐留,軸向伸縮機構可以實現機器人與腸道之間的相對位移,三個運動機構的相互配合使機器人在腸道內實現仿尺蠖式運動。
圖1 ?擴張?伸縮式機器人樣機
擴張?伸縮式機器人在人體腸道內的運動步態模擬了自然界中尺蠖的運動方式,圖2中對機器人每個運動步態進行分析,并通過這種運動步態研究機器人在腸道內的運動效率。假設圖2a)為機器人運動過程中的第一個步態,在這個步態中,機器人的每個運動機構都處于打開的狀態。圖中的空心點表示該位置在機器人上,圖中的實心點表示該位置在腸道上,如[Rr0]點是機器人后端擴張機構的位置,[Rf0]點是機器人前端擴張機構的位置,[Ir0]點是腸道上與[Rr0]點位于同一軸向位置的一點,[If0]點是腸道上與[Rf0]點位于同一軸向位置的一點。[dfr0]是機器人兩個擴張機構之間的距離。
圖2 ?機器人運動步態分析
從圖2a)到圖2b)的運動過程中,機器人后端擴張機構縮回,因為這個區域內的腸道失去了擴張機構的駐留作用,[Ir0]點的位置相對于[Rr0]點向運動方向回縮了一段距離。從圖2b)到圖2c)的運動過程中,機器人軸向運動機構縮回。在這一步態中,機器人和腸道上許多地方的位置發生了變化,機器人后端擴張機構運動到[Rr1]點,腸道上[Ir0]點的位置由于腸道被壓縮的原因繼續向機器人運動方向回縮了一段距離,[Rf0]點的位置由于前端擴張機構出現了駐留失效而移動到[Rf1]點(如果沒有出現駐留失效,則[Rf0]點的位置不變),[If0]的位置也由于[Rf0]點位置的變化而移動了一段距離。這一步態后,機器人兩個擴張機構之間的距離變為[dfr1],假設這一過程中腸道的壓縮量為[dic],則[dic]就是這一過程中因為腸道壓縮引起的步距損失。前端擴張機構的等效移動距離[df]則為駐留失效引起的步距損失。
從圖2c)到圖2d)的運動過程中,機器人后端擴張機構張開,圖中[Ir1]點是腸道上與[Rr1]點位于同一軸向位置的一點,[If1]點是腸道上與[Rf1]點位于同一軸向位置的一點。從圖2d)到圖2e)的運動過程中,機器人前端擴張機構縮回,因為這個區域內的腸道失去了擴張機構的駐留作用,[If1]點的位置相對于[Rf1]點向運動方向移動了一段距離。從圖2e)到圖2f)的運動過程中,機器人軸向運動機構伸長。在這一步態中,機器人和腸道上許多地方的位置發生了變化,機器人前端擴張機構運動到[Rf2]點,腸道上[If1]點的位置由于腸道被拉伸的原因繼續向機器人運動方向移動了一段距離,[Rr1]點的位置由于后端擴張機構出現了駐留失效而移動到[Rr2]點(如果沒有出現駐留失效,[Rr1]點的位置則不變),[Ir1]的位置也由于[Rr1]點的位置的變化而移動了一段距離。假設這一過程中腸道的拉伸量為[die],則[die]就是這一過程中因為腸道拉伸引起的步距損失。前端擴張機構的等效移動距離[dr]則為駐留失效引起的步距損失。
從圖2f)到圖2g)的運動過程中,機器人前端擴張機構張開,機器人開始重復新一輪的步態循環。圖中顯示了機器人擴張機構所在位置的移動過程。
通過上面的分析可知,導致機器人運動效率降低的原因主要有兩點:由于腸道形變導致的步距損失;由于駐留機構失效導致的步距損失。機器人運動效率的計算公式如下:
以下分別對這兩個原因引起的步距損失進行分析。
2 ?擴張機構失效引起的步距損失
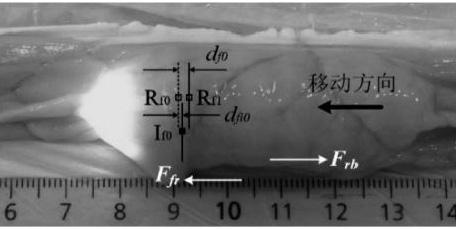
為了分析擴張機構駐留失效導致的步距損失,對圖2c)中的步態進行具體分析,如圖3所示。圖中[Ffr]是腸道對前端擴張機構的軸向作用力,[Frb]是腸道對機器人機身的作用力,這兩個作用力的方向相反,大小相同。機器人擴張機構擴張腸道后,在與腸道之間不發生相對移動的前提下所能承受的最大軸向作用力稱為最大駐留力。駐留失效出現的原因是[Frb]的大小超過了最大駐留力。
圖3 ?駐留失效分析
腸道是非對稱性的管狀結構,具有復雜的生物力學特性,因此很難得到步距損失的精確表達式。為了簡化分析,對腸道結構及其生物力學特性做如下假設:
1) 為了方便計算,假設腸道被機器人擴張機構擴張后的結構是規則的圓柱形和錐形。
2) 考慮到機器人在腸道內的運動速度較小(一般情況下低于10 mm/s),且由于機器人運動引起的腸道應變率同樣較小(一般情況下低于5%),機器人運動過程中腸道的生物力學特性近似為[18?20]:
式中:[σ]是腸道受到機器人施加的應力;[γ]為腸道的應力?應變系數;[ε]是腸道的應變率。
由圖3中的分析可得出機器人前端擴張機構和腸道之間的移動距離為[df0-dfi0],因為擴張機構在移動的同時對腸道有拉伸的作用,因此這并不是真正因為駐留失效導致步距損失的原因。假設機器人擴張機構在這一過程中對腸道施加的軸向應力為[σa],則腸道在這一應力作用下的軸向應變為:
由于腸道的應變率通常較小,因此駐留失效導致的步距損失與[df0-dfi0]接近。
3 ?腸道形變引起的步距損失
3.1 ?腸道壓縮引起的步距損失
為了分析由于腸道壓縮導致的步距損失,對圖2b),圖2c)中的步態進行具體分析,如圖4a),圖4b)所示,圖中的粗實線為腸道輪廓,虛線為機器人輪廓。
為了方便分析,將腸道分成不同的腸道段,如圖4b)所示。[L2]段腸道與機器人機身接觸,長度為[l2];[L1]段腸道位于機器人兩個擴張機構之間且與機器人機身接觸,長度為[l1];[L0]段腸道位于機器人兩個擴張機構之間且不與機器人機身接觸,長度為[l0],與機器人機身的角度為[α]。[Fri]是機器人機身對腸道的軸向作用力,[Fricosα]是機器人對[L0]段腸道施加的作用力。[ref]是機器人的擴張距離,[rb]是機器人半徑。
圖4 ?腸道壓縮模型

3.2 ?腸道拉伸引起的步距損失
為了分析由于腸道拉伸導致的步距損失,對圖2e)、圖2f)中的步態進行具體分析,如圖5a),圖5b)所示。
圖5 ?腸道拉伸模型

通過上面的分析可得出如下有助于提高機器人運動效率的方法:
1) 通過分析式(1)可知,在步距損失不變的情況下,提高機器人的步距從理論上來說可提高機器人的運動效率。
2) 通過合適的方法提高機器人擴張機構在腸道中的駐留能力對提高機器人運動效率很關鍵,這能減小因為駐留失效引起的步距損失。
3) 通過分析式(15)和式(16)可知,減小機器人對腸道施加的作用力可降低腸道變形引起的步距損失。因此,通過優化機器人結構設計以及使用摩擦力更小的材料以減小機器人對腸道施加的作用力可有效提高機器人在腸道內的運動效率。
4) 通過分析式(15)和式(16)可知,機器人總體長度不變的同時縮短機器人兩個擴張機構之間的長度可提高運動效率。
4 ?實 ?驗
本文設計了一組離體腸道實驗用于研究機器人在腸道內的運動效率,圖2中機器人運動步態的圖片均取自實驗過程中。實驗中設置的變量為:不同的理論運動速度、三種離體腸道直徑。機器人理論運動速度的改變通過在每個運動步態之間插入一定的停頓時間來實現。如果每個運動步態之間的停頓時間為[tint],則機器人運動一個步態循環的時間增加6[tint]。離體腸道#1的直徑為12.7 mm,離體腸道#2的直徑為15.9 mm,離體腸道#3的直徑為19.1 mm,圖6為實驗中測得的數據。實驗過程中,機器人在離體腸道內的運動速度最低為0.62 mm/s,最高為1.29 mm/s,機器人的運動效率最低為34.2%,最高為63.7%。
圖6 ?機器人運動效率實驗數據

從圖6中的實驗數據可以看出,機器人的運動效率隨著[tint]的增加而提高,機器人的運動速度隨著[tint]的增加而降低。[tint]的增加將使機器人的理論運動速度降低,因此實際運動速度也將降低,同時,[tint]的增加將使腸道在步態間隔有更長的時間適應擴張機構,有利于提高擴張機構的駐留能力,因此可以減少因為駐留失效導致的步距損失,提高機器人的運動效率。
5 ?結 ?論
本文對擴張?伸縮式機器人在腸道中的運行效率進行了研究,結合機器人的運動步態分析了影響運動效率的因素。導致機器人運動效率降低的原因有以下幾點:由于機器人擴張機構駐留失效導致的步距損失、由于腸道形變導致的步距損失。建立模型分析駐留失效導致步距損失出現的原因,得出減小這部分步距損失的關鍵在于增強機器人擴張機構的駐留能力;建立腸道壓縮與拉伸的模型,分別計算由于腸道壓縮與拉伸導致的步距損失,并得出幾點減小這部分步距損失的機器人設計要點。通過實驗平臺研究機器人在腸道內運動效率的特點,實驗結果表明,機器人在離體腸道中的運動效率在34.2%~63.7%,實際運行速度在0.62~1.29 mm/s,機器人在腸道中的運動效率隨著運動步態之間的時間間隔的增加而提高。本文中提出的模型和分析可對胃腸道機器人的設計提供參考。
參考文獻
[1] NAJARIAN S, AFSHARI E. Evolutions and future directions of surgical robotics: a review [J]. International journal of clinical medicine, 2012, 3(2): 75.
[2] IDDAN G, MERON G, GLUKHOVSKY A, et al. Wireless capsule endoscopy [J]. Nature, 2000, 405(6785): 417.
[3] WANG Xiaona, MENG Q H. Perspective of active capsule endoscope: actuation and localisation [J]. International journal of mechatronics and automation, 2011, 1(1): 38?45.
[4] ZHANG P, LI Jing, HAO Yang, et al. A compensation strategy for accurate orientation of a tethered robotic capsule endoscope [C]// Proceedings of 2017 IEEE International Conference on Cyborg and Bionic Systems. Beijing: IEEE, 2017: 257?261.
[5] GAO Jinyang, YAN Guozheng, WANG Zhiwu, et al. Design and testing of a motor?based capsule robot powered by wireless power transmission [J]. IEEE/ASME transactions on mechatro?nics, 2016, 21(2): 683?693.
[6] BASAR M R, AHMAD M Y, CHO J, et al. Stable and high?efficiency wireless power transfer system for robotic capsule using a modified Helmholtz coil [J]. IEEE transactions on industrial electronics, 2017, 64(2): 1113?1122.
[7] DI NATALI C, BECCANI M, SIMAAN N, et al. Jacobian?based iterative method for magnetic localization in robotic capsule endoscopy [J]. IEEE transactions on robotics, 2016, 32(2): 327?338.
[8] YANG Wanan, ZHAO Xin, Hu Chao, et al. The verification of force exerted on robotic capsule looped by magnet ring [J]. International journal of applied electromagnetics and mechanics, 2015, 47(3): 677?689.
[9] VALDASTRI P, WEBSTER III R J, QUAGLIA C, et al. A new mechanism for mesoscale legged locomotion in compliant tubular environments [J]. IEEE transactions on robotics, 2009, 25(5): 1047?1057.
[10] LIEN G S, LIU C W, JIANG J A, et al. Magnetic control system targeted for capsule endoscopic operations in the stomach—design, fabrication, and in vitro and ex vivo evaluations [J]. IEEE transactions on biomedical engineering, 2012, 59(7): 2068?2079.
[11] SIMI M, VALDASTRI P, QUAGLIA C, et al. Design, fabrication, and testing of a capsule with hybrid locomotion for gastrointestinal tract exploration [J]. IEEE/ASME transactions on mechatronics, 2010, 15(2): 170?180.
[12] ZHANG Cheng, LIU Hao, TAN Renjia, et al. Interaction model between capsule robot and intestine based on nonlinear viscoelasticity [J]. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of engineering in medicine, 2014, 228(3): 287?296.
[13] CHEN Wenwen, YAN Guozheng, WANG Zhiwu, et al. A wireless capsule robot with spiral legs for human intestine [J]. The International journal of medical robotics and computer assisted surgery, 2014, 10(2): 147?161.
[14] JIA Zhiwei, YAN Guozheng, LIU Hua, et al. The optimization of wireless power transmission: design and realization [J]. International journal of medical robotics and computer assisted surgery, 2012, 8(3): 337?347.
[15] LIN Wei, SHI Yuting, JIA Zhiwei, et al. Design of a wireless anchoring and extending micro robot system for gastrointestinal tract [J]. The International journal of medical robotics and computer assisted surgery, 2013, 9(2): 167?179.
[16] WANG Kundong, YAN Guozheng, JIANG Pingping, et al. A wireless robotic endoscope for gastrointestine [J]. IEEE transactions on Robotics , 2008, 24(1): 206?210.
[17] GAO Peng,YAN Guozheng, WANG Zhiwu, et al. Wireless technologies for robotic endoscope in gastrointestinal tract [J]. Journal of medical engineering & technology, 2012,36 (5): 242?250.
[18] CIARLETTA P, DARIO P, TENDICK F, et al. Hyperelastic model of anisotropic fiber reinforcements within intestinal walls for applications in medical robotics [J]. The International journal of robotics research, 2009, 28(10): 1279?1288.
[19] PHEE L, ACCOTO D, MENCIASSI A, et al. Analysis and development of locomotion devices for the gastrointestinal tract[J]. IEEE transactions on biomedical engineering, 2002, 49(6): 613?616.
[20] TERRY B S, SCHOEN J A, Rentschler M E. Measurements of the contact force from myenteric contractions on a solid bolus [J]. Journal of robotic surgery, 2013, 7(1): 53?57.
