激光跟蹤儀滑軌測量精度分析
2019-07-05 09:41:44胡玉坤張文峰彭攀
城市勘測 2019年3期
胡玉坤,張文峰,彭攀
(寧波市測繪設計研究院,浙江 寧波 315042)
1 引 言
近年來,在精密制造、裝配及檢測等工業測量和精密工程測量領域,激光跟蹤儀以其測量速度快、精度高、測量范圍大的優點得到了廣泛應用,被稱為移動的三維坐標測量機。激光跟蹤儀的本質是一種球坐標測量系統,其基本原理是測量目標點的距離及水平和垂直方向的偏轉角,建立以測站為中心的極坐標系。距離分量由激光干涉儀測量,角度分量由高精度角度編碼器測量[1,2]。
激光跟蹤儀通常有兩種測量模式:一是單站測量,測量所有目標(FARO激光跟蹤儀測量半徑為 60 m);二是轉站測量,通常在長距離測量以及通視條件不好時使用。一般利用3個以上的公共點以及一定數量的檢核點通過光速法平差原理建立相鄰站間的姿態及定向關系,避免換站造成的誤差累計[3~10]。
本文運用Leica TM30全站儀和FARO激光跟蹤儀對某大學多功能船模拖拽水池試驗場地基準樁進行了測量,比對其調軌精度,驗證了激光跟蹤儀滑軌測量平面精度可達到 0.5 mm,說明了激光跟蹤儀在高精度滑軌測量中是可行的。
2 測量原理
從功能上來說,激光跟蹤儀相當于高精度且具有自動、快速跟蹤功能的全站儀。其對空間目標的坐標測量是通過測量目標點的水平角、垂直角和斜距,然后按球坐標或極坐標測量原理求出空間點的三維坐標x、y、z。如圖1所示,在球坐標測量系統中,設跟蹤器的旋轉中心為O點,被測靶球的中心為P點。
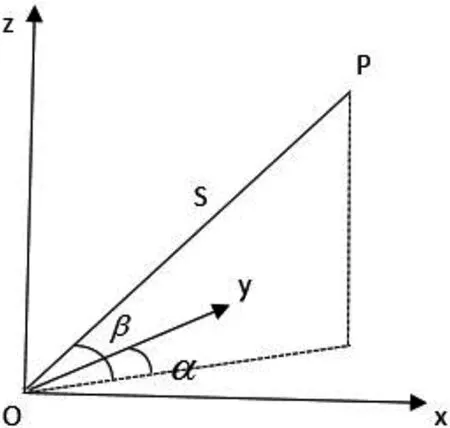
圖1 激光跟蹤儀坐標測量原理
用兩個角度編碼器分別測量出P點的垂直角和水平角,用激光干涉儀測量O點到P點的距離d,則P點坐標刻有式(1)得出。
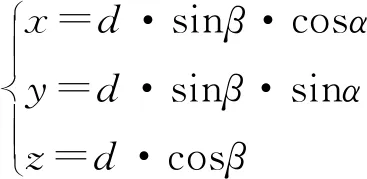
(1)
3 實驗分析
3.1 實驗研究對象
實驗基于某大學多功能船模拖拽水池試驗場地基準樁進行。2015年12月,采用Leica TM30和Trimble水準儀完成了基準點強制歸心裝置的安裝放樣及精密測量工作,點位放樣精度達到 3 mm,高程精度達到 1 mm。定義了當地坐標系,1號點為坐標系原點,x軸與滑軌平行,基本指北,y軸指東,z軸垂直向上,構成左手坐標系。基準樁個數共計12個,多功能船模拖拽水池試驗場示意圖如圖2所示。
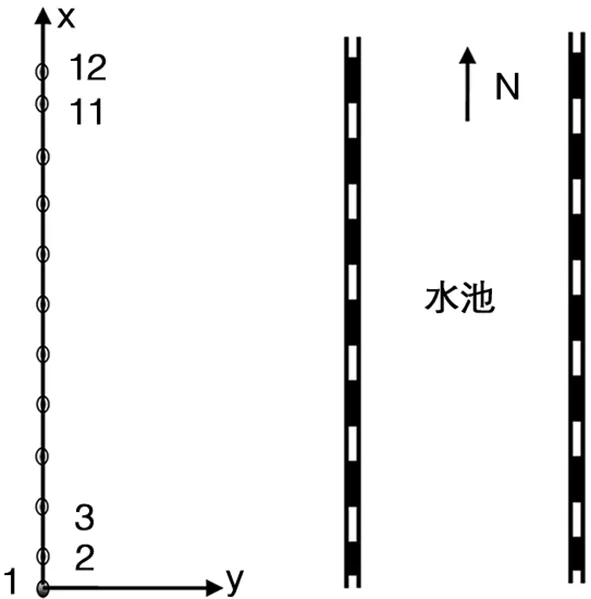
圖2 多功能船模拖拽水池試驗場示意圖
3.2 跟蹤儀和全站儀測站布設方案
為驗證激光跟蹤儀滑軌測量精度,2016年4月,采用Leica TM30和FARO激光跟蹤儀對基準樁進行了復測,對上次的安裝位置進行了微調,并利用激光跟蹤儀測量與全站儀測量進行互相檢核。圖3為多功能船模拖拽水池試驗場地。

圖3 多功能船模拖拽水池試驗場地
現場總共有12個控制點,全站儀調軌時,鑒于現場光照條件等影響,于點7設站,以點5后視,采用方位角定向,逐點放樣。在放樣時要求點5保持不動,最佳直線過點7。FARO激光跟蹤儀最大測距范圍為 60 m,現場每兩點間距約為 30 m,為滿足激光跟蹤儀測量要求,實驗中依次設站于點2點3間、點4點5間、點6點7間、點8點9間、點10點11間。
3.3 實驗數據處理與結果分析
全站儀調軌時發現現場大部分控制點基本只能往一邊調節,說明初始點位偏移較大,這就給放樣直線增加了難度。分析發現點9、點10、點12變化較大,已不可調節,且點9、點10只能往水池方向調節(圖中右方),故將點12重新焊接,為了盡量減少焊接所引起的不必要誤差,將其余點集體往墻面方向調節 7 mm(圖中左方)。然后設站點7,以點2后視,方位角定向方法放樣。可得最佳直線方位角4.6″。表1為放樣后各點方位角,圖4為全站儀調軌后點位與最佳直線的關系及殘差圖。

放樣后方位角 表1
為了盡量減少激光跟蹤儀換站誤差的累積,每次換站設4個換站點,并保證4個換站點間的空間距離足夠大。換站后復測發現X方向與Y方向誤差在 0.5 mm以內,Z方向誤差在 1 mm以內。圖5為跟蹤儀調軌后點位與最佳直線的關系及殘差圖。
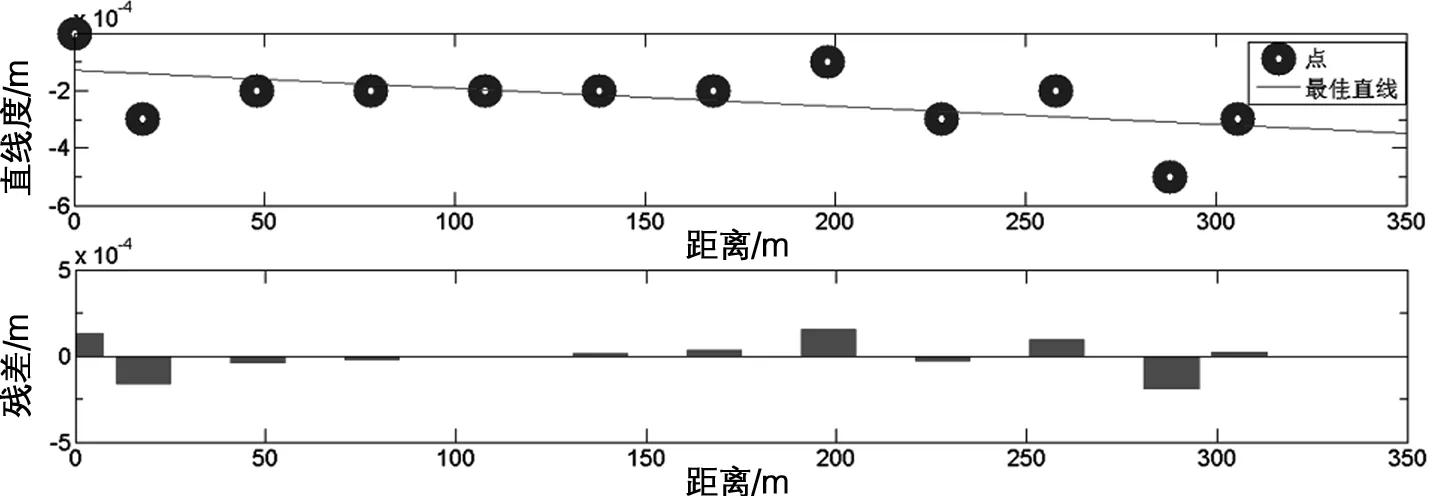
圖4全站儀調軌后點位與最佳直線的關系及殘差圖

圖5 跟蹤儀一次調軌后點位與最佳直線的關系及殘差圖
由圖5可以看出點1、點9、點12超出了限差 1 mm,故應當重新放樣。圖6為跟蹤儀二次調軌后點位與最佳直線的關系及殘差圖。
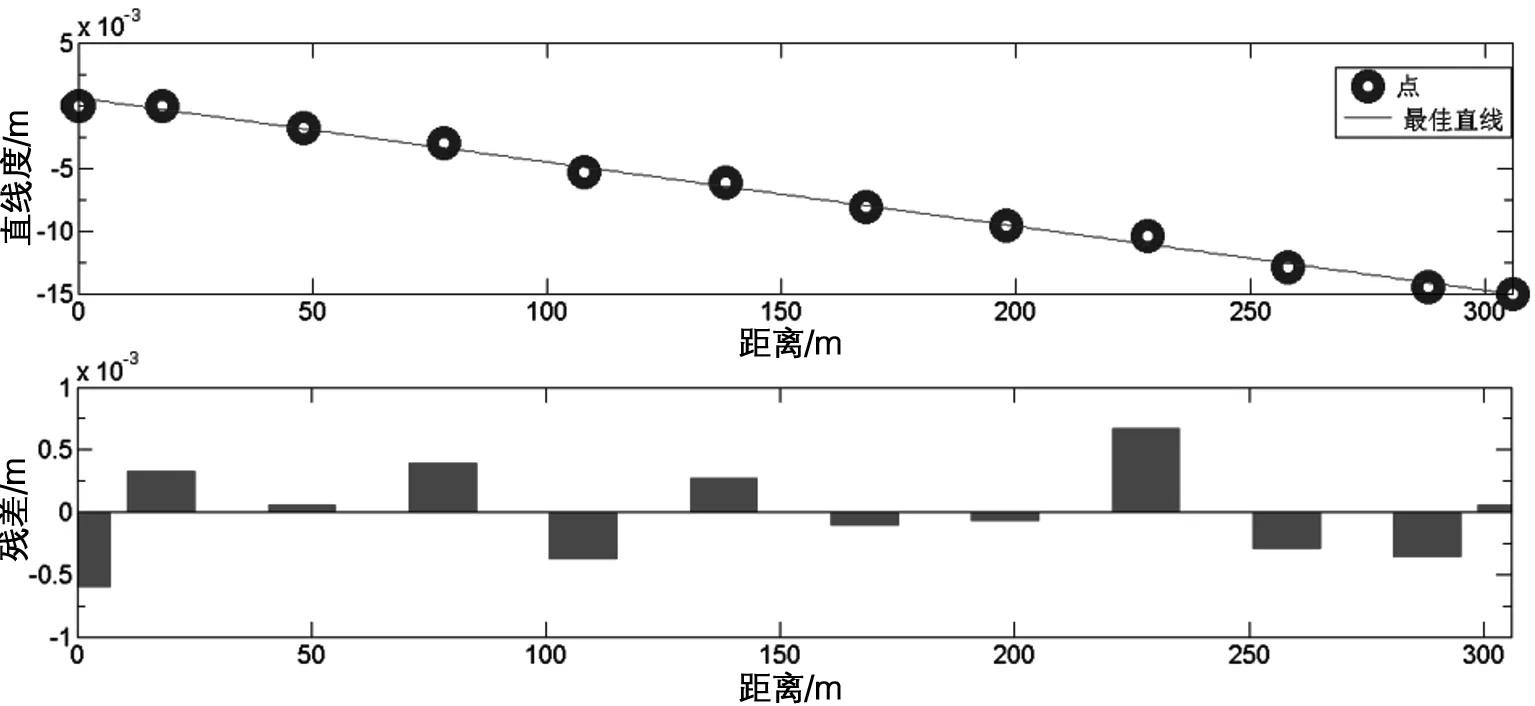
圖6跟蹤儀二次調軌后點位與最佳直線的關系及殘差圖
由圖4~圖6可以看出,全站儀調軌后與最佳直線的殘差最大為 1.6 mm,跟蹤儀一次調軌后與最佳直線的殘差最大為 -2.6 mm,跟蹤儀二次調軌后與最佳直線的殘差最大為 +0.5 mm。說明X方向與Y方向(圖1中所示軌道方向與水池方向),精確到了 0.5 mm以內,完全滿足 1 mm的精度要求。下對跟蹤儀二次調軌坐標與全站儀坐標進行對比分析,以驗證跟蹤儀滑軌測量精度。
由于全站儀測量時以點7為原點,以點7與點2確定的直線為X軸建立左手坐標系;跟蹤儀測量時以點1為原點,以儀器面為XY面,以儀器面的垂線為Z軸建立右手直角坐標系。因此需要將二者轉換到當地坐標系。轉換時利用點1~點11,11個點根據布爾莎-沃爾夫(Bursa-wolf)模型運用最小二乘轉換。轉化結果與較差如表2所示:
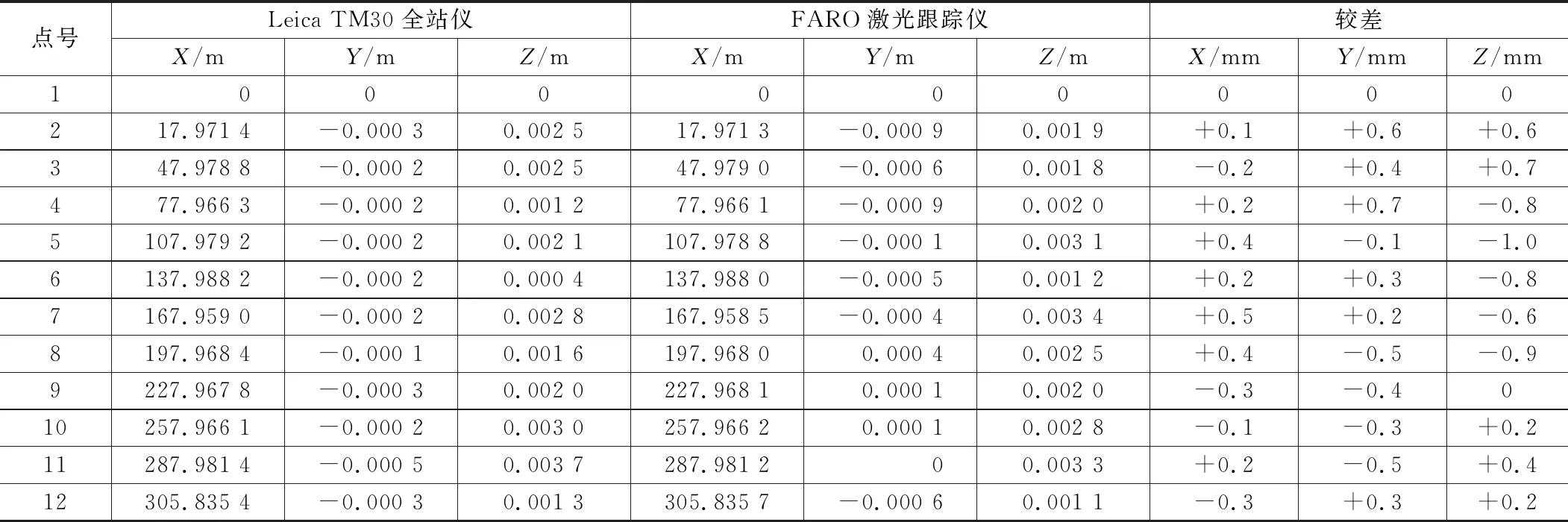
跟蹤儀與全站儀坐標對比表 表2
由表2可以看出:轉換后TM30全站儀與FARO激光跟蹤儀的較差,X方向最大為 0.5 mm,Y方向最大為 0.7 mm,均在測量誤差范圍內。實際操作中可用全站儀輔助激光跟蹤儀調軌以起到檢核作用。
4 結 論
激光跟蹤儀具有測量精度高、實時快速、動態測量、便于移動等優點,大量應用于精密制造、裝配及檢測等工業測量和精密工程測量領域。本文運用Leica TM30全站儀和FARO激光跟蹤儀對某大學多功能船模拖拽水池試驗場地基準樁進行了測量,比對其調軌精度,驗證了激光跟蹤儀滑軌測量平面精度可達到 0.5 mm,說明了激光跟蹤儀在高精度滑軌測量中是可行的。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08