地鐵隧道變形監測方法研究
2019-07-05 09:41:44秦炳權
城市勘測 2019年3期
秦炳權
(廣州市城市規劃勘測設計研究院,廣東 廣州 510060)
1 引 言
三維激光掃描[1~3]能夠快速高效地采集海量點數據,以其數據全面、高效等優點成為變形監測領域一種重要的技術。地鐵隧道施工運營過程中,需要定期進行變形監測。隧道斷面變形分析是變形監測的常用手段。隧道斷面的精確提取是隧道斷面變形分析的前提。傳統的斷面提取方法是采用伺服全站儀等按等距或等角模型沿縱斷面采集一定數量的點位坐標,并根據采集的點集合分析斷面形變情況。傳統方法監測點位少;自動化程度低;監測周期達不到要求等問題。所以基于點云數據的斷面提取[4~6]成為必然趨勢。本文對隧道斷面截取與擬合[7]進行研究,提出基于最小包圍盒法提取中軸線,再以中軸線為基準提取斷面切片再結合RANSAC算法進行二次曲面擬合方法,算法包括了點云數據的采集、配準、拼接、降噪等預處理和中軸線提取和斷面截取與曲面擬合。
2 點云數據預處理
三維激光掃描儀會采集到海量的數據,必須對數據進行配準、降噪過濾誤差點后才能進行監測分析,本文對采集的地鐵隧道點云數據進行預處理后的效果圖如圖1所示。

圖1 點云數據預處理后效果圖
3 中軸線提取
在提取隧道斷面時,需要擬合出隧道的中軸線來表示隧道空間姿態與走勢,并作為隧道縱向變形和整體沉降的依據。為了提取點云數據中軸線,根據最小包圍盒法[8]中長方體包圍盒AABB和有向包圍盒OBB通過物體旋轉與坐標系旋轉得到最小包圍盒體積的對比如圖2所示。選擇基于坐標系旋轉來得到點云體積最小包圍盒的方法。
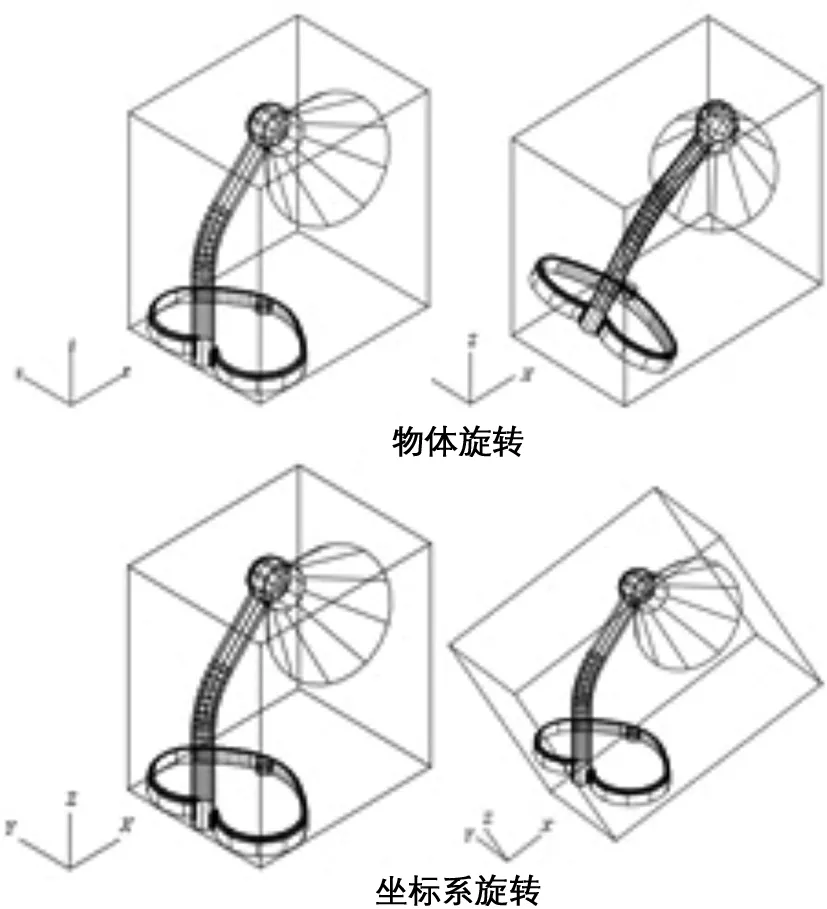
圖2 體積最小包圍盒旋轉對比
因為長方體包圍盒無法全部緊貼在點云上,解算軸線時會有較大偏差,所以采用每隔一定距離d取切片,結合切片上的點云來做橢圓擬合獲取圓心,連接圓心形成曲線作為軸線來修補偏差。如圖3所示:
然后在每個切片上建立坐標系,對點云進行橢圓擬合,設觀測值為橢圓上點坐標(xi,yi),參數為橢圓中心坐標(x0,y0)以及橢圓的a和b,建立平面橢圓方程:
(1)
聯立誤差方程,如式(2)所示
(2)
其中n為點云個數。線性化如下:
(3)
△x0,△y0,△a,△b為橢圓中線坐標和長短半軸的改正值mi1,mi2,mi3,mi4的值由式(4)確定:
(4)
其中x0,y0,a0,b0分別是中心坐標和長短半軸的初值。采用間接平差求取各點的擬合誤差和標準差。
(5)
最后根據最小二乘原理,VTV=min,得式(6):
(6)
(7)
標準差可以通過式(8)得到:
(8)
在對每個切片進行上述的橢圓擬合之后,得到各擬合橢圓的圓心(xi,yi,zi),再進行曲線擬合就可以得到中軸線。d<ε/2,為斷面厚度,
4 斷面截取曲面擬合
以中軸線為基準的斷面截取擬合方法流程為圖4所示:
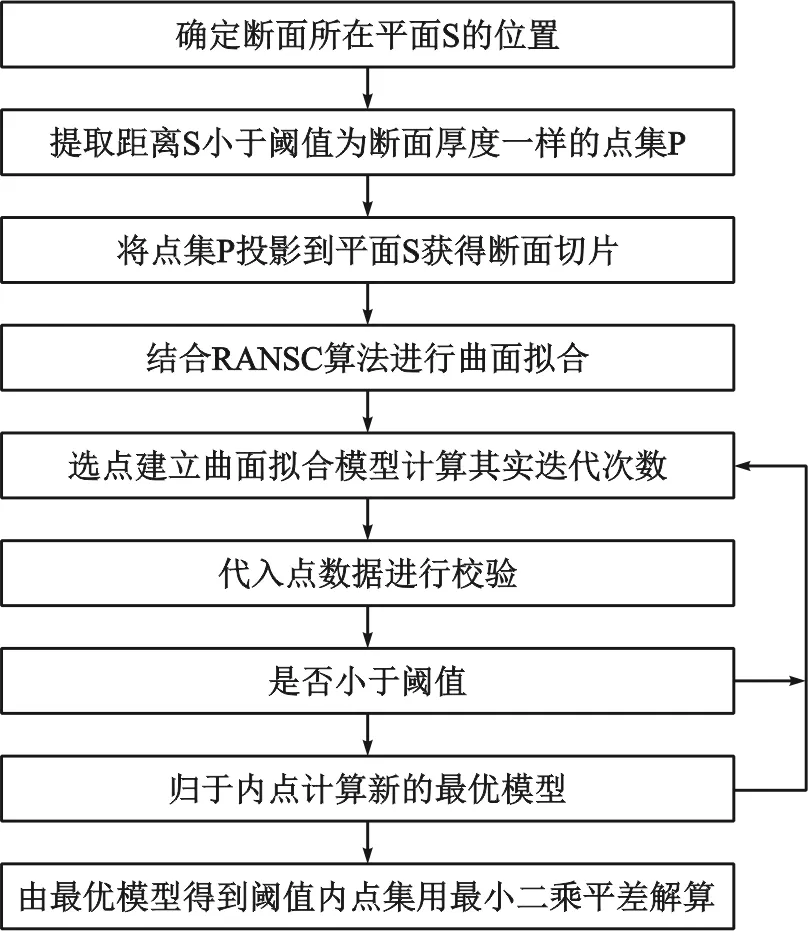
圖4 斷面截取擬合方法流程
具體方法如下:
Step1 給定需截取的斷面里程K,求解對應中軸線上的點的坐標O(x,y,z),切向量n(a,b,c),斷面所在平面S的方程如下:
aX+bY+cZ-ax-by-cz
(9)
Step2 遍歷點p(X,Y,Z),點到平面S的距離d為:
(10)
點p∈P,得到點集P。
Step3 將P(p1,p2,…,pn)投影到平面S上,投影點與O點構成Q(q0,q1,q2,…,qn)即為基于中軸線截取得到的斷面切片。
Step4 得到斷面切片之后,對隧道變形進行比較分析,需要對斷面切片上的點進行曲面擬合,根據曲面擬合的模型,由式(10)可計算起始時迭代次數如下所示:
(11)
點個數即為用于擬合曲面的點云中的三維點總數,每次擬合點數最少為10。
Step5 隨機抽取10個點,計算出相應的模型參數,利用其他點進行模型檢驗。設置限差閾值,將其他點代入當前模型所能允許的限差,小于限差則認為該點符合估計的模型。
Step6 檢驗若通過的點數增多,即得到更優的模型,以此模型為當前最優模型,重新計算迭代次數進入下一次循環,直到迭代次數內沒有出現更優的模型時,迭代終止。
Step7 根據最優模型,找到符合該模型閾值內的點,其中RANSAC算法已經排除偏離曲面較大的噪聲點,對點集進行最小二乘平差解算即為該方法的最終結果。
5 實驗分析
本次變形分析采用的是已經完成了的地鐵隧道的某一期數據采集,隧道內部三維視圖如圖5所示。
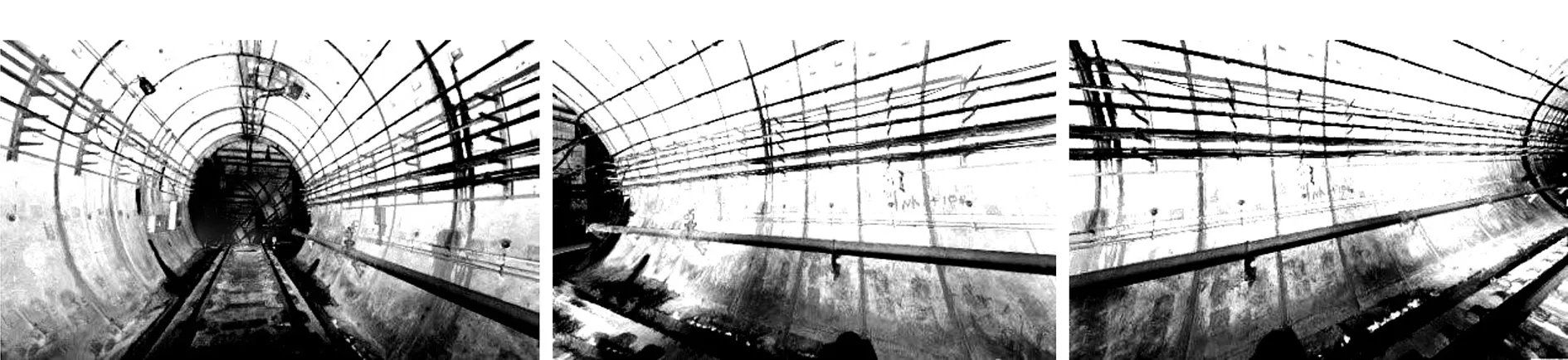
圖5隧道內部三維視圖
在提取中軸線中,對切片上的點云進行橢圓擬合尋找中線點,最后對中心點進行最小二乘曲線擬合,得到隧道的中軸線。表1為本文擬合中軸線點位數據與全站儀測取的軸線點位數據進行對比偏差對比。
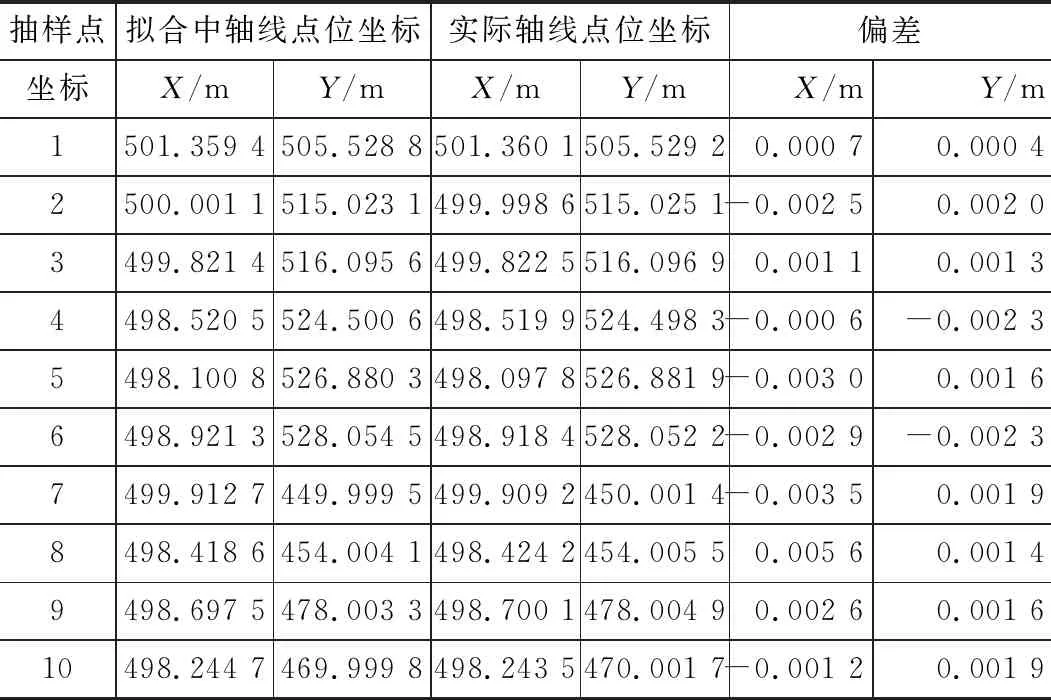
中軸線最小二乘擬合數據與實際數據對比 表1
由表1可知,中軸線提取擬合數據與全站儀實際測取數據相比X坐標最小誤差為0.000 6 m,最大誤差為 0.005 6 m;Y坐標最小誤差 0.000 4 m,最大誤差為 0.002 3 m。軸線提取精度較高。監測隧道橫斷面的直徑是隧道變形監測最常用的方法,直徑變形值數據可以顯示出隧道在外部壓力下橫截面的橢圓是否形變。傳統測量中是在需要變形監測的地方安裝反射棱鏡,將全站儀安置在控制點上,測量棱鏡坐標并通過坐標反算獲得兩點之間的距離。如圖6所示:
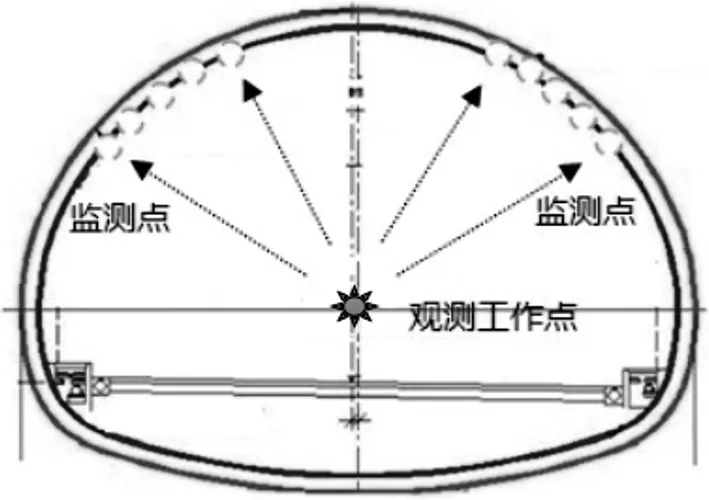
圖6 隧道管徑監測點測量示意圖
為進一步直觀表示測段隧道是否變形,將地鐵設計施工時設定的監測點橫徑值分別減去此期觀測計算值與算法擬合值,得到每個環片斷面的橫徑收斂值如表2所示,由表2可知,本文所提方法與實測精度相比能到達實際作業要求,算法簡單且自動化程度高。選取同一里程擬合斷面在CAD中效果比對如圖7所示,更直觀體現出隧道收斂狀況。
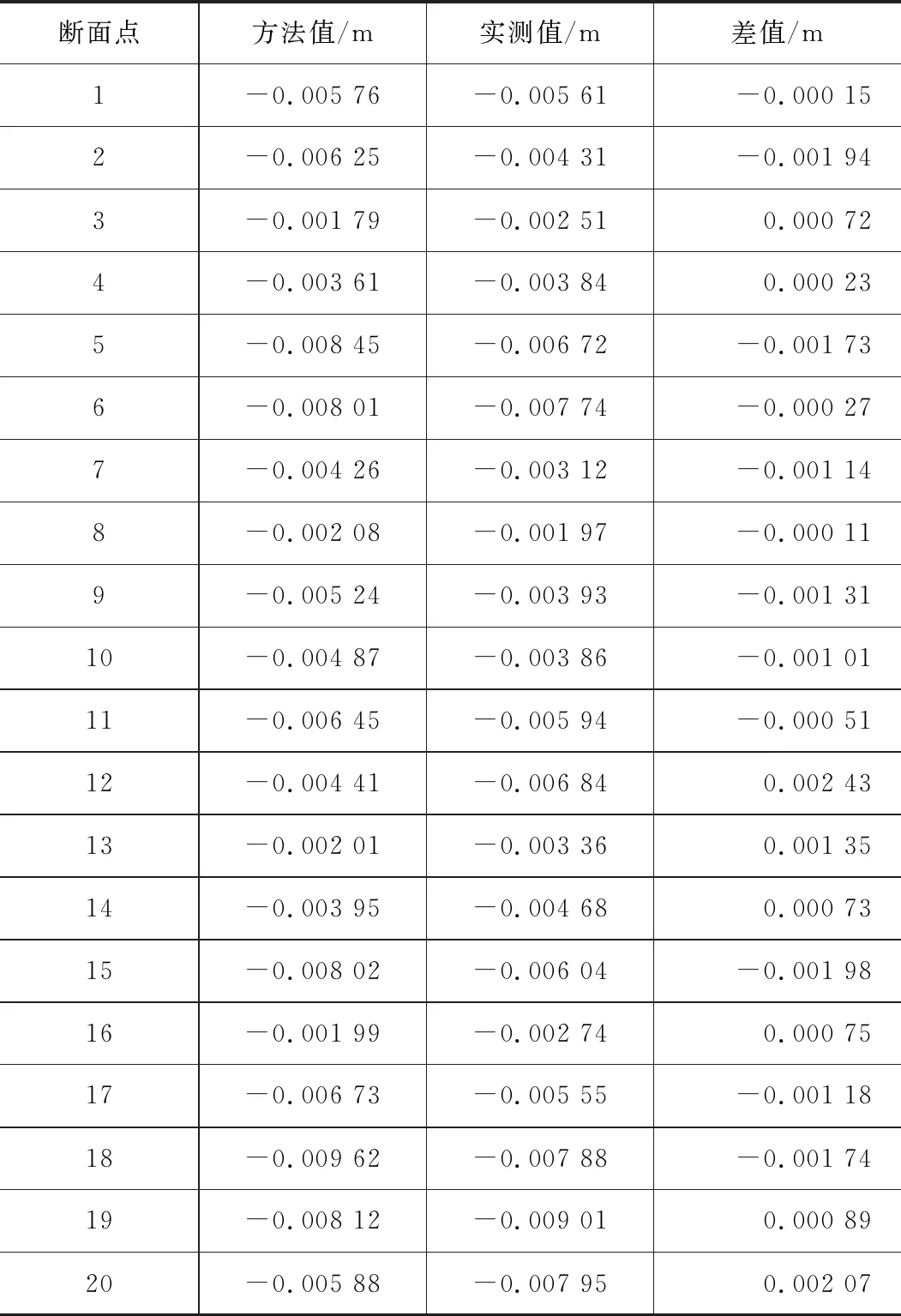
本文算法與實測斷面橫徑收斂表 表2
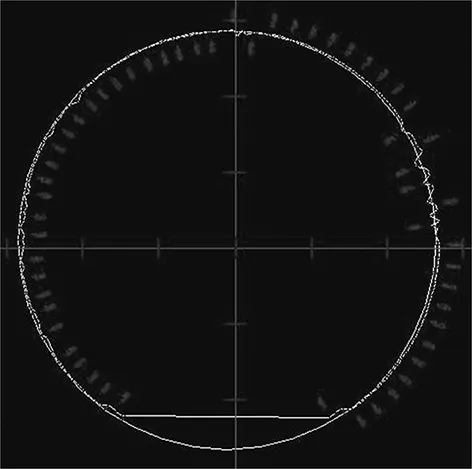
圖7同一里程擬合斷面在CAD中效果圖
6 總 結
本文對中軸線提取和斷面擬合進行了研究,提出以體積最小包圍盒提取中軸線的方法,可以整體對點云數據進行坐標系旋轉擬合得到中軸線,對切片進行局部擬合提高效率,同時便于對特別測段進行重點監測。通過與傳統作業方法相比,精度滿足實際作業需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34