基于多極化特征和紋理特征的PolSAR圖像分類
2019-07-05 09:51:46宋瑞超趙國忱卜麗靜
城市勘測 2019年3期
宋瑞超,趙國忱,卜麗靜
(遼寧工程技術(shù)大學(xué) 測繪與地理科學(xué)學(xué)院,遼寧 阜新 123000)
1 引 言
全極化合成孔徑雷達(dá)(polarimetric synthetic aperture radar,PolSAR)具有全天時(shí)、全天候和透射性強(qiáng)等諸多優(yōu)點(diǎn),極化SAR 影像的地物分類技術(shù)逐漸成為各國學(xué)者的研究熱點(diǎn)[1,2]。極化SAR影像全面包含了地物的散射信息,其獲得的HH、HV、VH、VV四種散射回波信息能夠很好地提高極化SAR影像的分類精度。2007年,Touzi[3]等人提出一種旋轉(zhuǎn)不變非相干分解法,用多個(gè)極化分量進(jìn)行分類實(shí)驗(yàn),加入極化特征能夠提高濕地的分類精度。2014年,Van Beijma[4]等人應(yīng)用Freeman-Durden分解和VanAyl分解等方法,對海岸區(qū)域進(jìn)行分類,結(jié)果表明,多種極化特征的結(jié)合使分類效果大大提高。另外,PolSAR影像中含有大量的紋理信息,紋理特征的應(yīng)用也能有效改善地物分類的結(jié)果。2013年,Hu[5]等人提出了一種稀疏編碼的小波紋理元方法,通過采樣構(gòu)建目標(biāo)的紋理基元庫,將紋理信息用于圖像分類中,這種方法具有較高的分類精度。但以上兩種特征的分別使用都有其缺點(diǎn)。相對于紋理特征,基于極化特征的分類中,道路、水泥房頂?shù)鹊匚锏纳⑸錂C(jī)制與水體相似,無法將其區(qū)分開來。而僅基于紋理特征的分類中,由于淺草和裸地表面都較為平滑,其紋理特征與水體相似,三者并不能完全區(qū)分開來。針對以上問題,本文提出一種結(jié)合極化特征與紋理特征的SVM(Support vector machine)分類方法,以湖北武漢市的GF3數(shù)據(jù)為例進(jìn)行分類實(shí)驗(yàn),已有效改善PolSAR圖像的分類效果。
2 多極化特征和紋理特征的PolSAR圖像分類算法原理
極化SAR影像中散射體的多極化特征可以反映PolSAR數(shù)據(jù)的本質(zhì)屬性,描述目標(biāo)的幅度和相位變化的完整信息。另外,PolSAR影像中的大量紋理特征反映散射體內(nèi)部有規(guī)律變化形成的影像結(jié)構(gòu)。分別提取影像的多極化特征和紋理特征,將多極化特征與紋理特征兩種性質(zhì)完全不同的特征進(jìn)行選擇與融合描述地物,使地物的表征更加完整,分類精度更高,更加具有實(shí)用性。
因此本文對輸入影像進(jìn)行去噪預(yù)處理,降低相干斑噪聲后,提取出影像的極化特征和紋理特征,對這兩種不同性質(zhì)的特征進(jìn)行選擇與融合,組成特征向量,用于結(jié)合極化特征和紋理特征的SVM非監(jiān)督分類實(shí)驗(yàn)。為了檢驗(yàn)本文分類實(shí)驗(yàn)的效果,又進(jìn)行了只加入極化特征,只加入紋理特征的非監(jiān)督分類實(shí)驗(yàn)以及Wishart監(jiān)督分類實(shí)驗(yàn),將四種不同的實(shí)驗(yàn)結(jié)果進(jìn)行對比分析。
2.1 極化特征提取
極化特征提取是本實(shí)驗(yàn)的關(guān)鍵步驟。將極化信息應(yīng)用于分類實(shí)驗(yàn)可以改善目標(biāo)的分類結(jié)果[6]。散射體的極化特性是由散射矩陣、Stokes矩陣、相干矩陣、協(xié)方差矩陣表示的,其中相干矩陣T和協(xié)方差矩陣C中的元素具有一定的物理意義[7,8]。基于目標(biāo)的散射屬性,將極化SAR數(shù)據(jù)的后散射系數(shù)變形得到散射矩陣S,再將散射矩陣S進(jìn)行矢量化可得到相干矩陣T與協(xié)方差矩陣C,從這些矩陣中可直接得到目標(biāo)的基礎(chǔ)特征,它反映的是PolSAR數(shù)據(jù)的本質(zhì)屬性,可以提取幅度和相位變化的完整信息。
對于線性電磁散射的雷達(dá)目標(biāo),只要已知散射空間坐標(biāo)系和相應(yīng)的極化基,就可以用線性變換關(guān)系表示雷達(dá)照射波和目標(biāo)散射波的各極化分量。極化散射矩陣S是用一個(gè)復(fù)二維矩陣表示目標(biāo)的變極化效應(yīng)的,表示在特定的姿態(tài)和觀測頻率下目標(biāo)的全極化信息。定義本地笛卡爾坐標(biāo)系(H,V),后向散射矩陣[S]可表示為:
(1)
散射矩陣S包含完全的電磁散射特征,可以描述目標(biāo)的能量、相位和極化特征。但實(shí)際得到的極化SAR圖像中存在較多的分布式目標(biāo)不能用散射矩陣表示,并且在進(jìn)行圖像處理中需濾出相干斑噪聲,由此引入相干矩陣T和協(xié)方差矩陣S。
利用Pauli基矩陣對散射矩陣S進(jìn)行矢量化可得相干矩陣[T3]:
(2)
其中K3P為Pauli基矩陣,H為復(fù)共軛轉(zhuǎn)置運(yùn)算符,*為復(fù)數(shù)共軛運(yùn)算符:
(3)
利用Lexicographic基矩陣對散射矩陣矢量化可得協(xié)方差矩陣[C3]:
(4)
其中K3L為Lexicographic基矩陣,H為復(fù)共軛轉(zhuǎn)置運(yùn)算符,*為復(fù)數(shù)共軛運(yùn)算符:
(5)
相干矩陣與協(xié)方差矩陣是一對相似矩陣,一方可以通過相似變換得到另一方。
在對PolSAR理論知識充分理解的基礎(chǔ)上,提取出可用于SVM監(jiān)督分類的極化參數(shù)。相干矩陣T和協(xié)方差矩陣C包含表示能量的實(shí)數(shù)3個(gè)對角線元素和6個(gè)獨(dú)立的復(fù)數(shù)元素。各元素表示的是各極化通道之間的相關(guān)性,特別是協(xié)方差矩陣中的元素反映了在各極化通道下目標(biāo)的后散射系數(shù)與通道間的相關(guān)系數(shù)。相干矩陣T適用于極化分解、分類和識別,協(xié)方差矩陣更適合于相干斑抑制等。
本文提取相干矩陣的對角線元素T11、T22、T33以及協(xié)方差矩陣的對角線元素C11、C22、C33,復(fù)數(shù)C12的模|C12|、相位角∠C12,復(fù)數(shù)C13的模|C13|、相位角∠C13,復(fù)數(shù)C23的模|C23|、相位角∠C2312個(gè)元素。將這12個(gè)元素組成極化特征向量FV,見式(6):
FV={T11,T22,T33,C11,C22,C33,∠C12,|C12|,∠C13,|C13,|,∠C23,|C23|}
(6)
2.2 紋理特征提取
極化SAR影像中的紋理信息可以有效地反映地物特征,對紋理信息的全面認(rèn)知將大大提高圖像的分類精度。本文基于經(jīng)典的灰度共生矩陣法進(jìn)行紋理特征的提取[9,10],提取信息熵(ENTROPY)、對比度(CONTRAST)、均值(MEAN)、相異性(DISSIMILARITY)、協(xié)同性(HOMOGENEITY)、一致性(UNIFORMITY)這6個(gè)紋理特征統(tǒng)計(jì)量進(jìn)行實(shí)驗(yàn),計(jì)算方法如下:
(1)信息熵(ENTROPY)

(7)
信息熵是圖像中信息量的度量,反映影像中紋理信息的復(fù)雜度和隨機(jī)性,熵值越大,圖像紋理越復(fù)雜,紋理隨機(jī)性越大[11]。
(2)對比度(CONTRAST)
(8)
對比度是圖像中的局部灰度變化的總量,反映影像清晰度和紋理溝紋的深淺,對比度越大,圖像越清晰,溝紋越深;反之,對比度越小,圖像越模糊,溝紋越淺[12]。
(3)均值(MEAN)
(9)
均值是圖像中所有像素灰度的平均值,反映圖像灰度的均勻性。
(4)相異性(DISSIMILARITY)
(10)
其中|i-j|=n0
相異性表示圖像紋理間的相異性,相異性越大,紋理間差異越大。
(5)協(xié)同性(HOMOGENEITY)
(11)
協(xié)同性也叫局部相似性,是圖像中局部區(qū)域的紋理特征的相似性,也就是說,局部相同的區(qū)域可能就是同屬一類的目標(biāo)。
(6)一致性(UNIFORMITY)
(12)
一致性也是反映圖像中局部區(qū)域的紋理信息。
將這6種紋理特征組合成一個(gè)紋理特征向量T,如式(13)所示:
T={CON,DIS,ENT,HOM,MEA,UNI}
(13)
2.3 算法流程
SVM分類方法是由線性可分情況下的最優(yōu)超平面發(fā)展而來,被推廣到非線性可分的數(shù)據(jù)中去[13]。如圖1所示,在二維平面內(nèi),空心點(diǎn)和實(shí)心點(diǎn)分別代表不同的兩類,這兩類能夠被多條分割線(平面)正確地區(qū)分開來,其中H稱為分類超平面,H1和H2分別為兩類離H最近的樣本所在的且平行于H的超平面,H1與H2到H的距離相等,它們之間的距離稱為分類間隔,為了提高分類精度,找到一個(gè)最優(yōu)超平面,使其將這兩類樣本正確地分開且分類間隔最大,這類情況稱為樣本線性可分[14]。

圖1 最優(yōu)超平面示意圖
若這兩類樣本不能被直線正確地分割開來(即非線性可分),SVM分類針對這種情況將低維的非線性可分?jǐn)?shù)據(jù)通過核函數(shù)(非線性映射方法)映射到高維特征空間,將在高維特征空間中通過樣本訓(xùn)練構(gòu)造的最優(yōu)分類超平面作為判決面,使兩類數(shù)據(jù)到該平面的距離最大,從而使分類風(fēng)險(xiǎn)上界最小[15]。這種分類方法需輸入每個(gè)類別的訓(xùn)練樣本,后續(xù)也可以通過檢驗(yàn)樣本來進(jìn)行分類精度的評價(jià)。
本算法的基本流程為:在輸入原始極化SAR圖像后,進(jìn)行圖像去噪預(yù)處理,降低相干斑噪聲,尤其是由于成像系統(tǒng)與水域內(nèi)大型金屬材質(zhì)的船只原因造成的十字叉型的噪聲,預(yù)處理同時(shí)保留較好的地物紋理信息。圖像預(yù)處理后分別提取影像的多極化特征和紋理特征。用不同的基對極化散射矩陣矢量化分別得到相干矩陣T和協(xié)方差矩陣C,將相干矩陣T與協(xié)方差矩陣C中的有效元素進(jìn)行組合得到極化特征FV={T11,T22,T33,C11,C22,C33,∠C12,|C12|,∠C13,|C13,|,∠C23,|C23|}。基于灰度共生矩陣法提取各個(gè)紋理特征參數(shù),組成紋理特征向量T={CON,DIS,ENT,HOM,MEA,UNI}。然后對這兩種不同性質(zhì)的特征向量進(jìn)行選擇與融合,進(jìn)行結(jié)合多極化特征與紋理特征SVM分類實(shí)驗(yàn),并將實(shí)驗(yàn)結(jié)果進(jìn)行精度分析,算法流程如圖2所示:

圖2 算法流程圖
3 分類實(shí)驗(yàn)
3.1 實(shí)驗(yàn)數(shù)據(jù)
本實(shí)驗(yàn)選用湖北武漢市的PolSAR數(shù)據(jù)進(jìn)行分類實(shí)驗(yàn),數(shù)據(jù)參數(shù)如表1所示。

實(shí)驗(yàn)數(shù)據(jù)參數(shù) 表1

圖3 實(shí)驗(yàn)數(shù)據(jù)
在該P(yáng)olSAR影像中截取一塊地物豐富的區(qū)域進(jìn)行研究,該區(qū)域內(nèi)中主要包括植被、水體、道路、裸地和建筑物5種地物。進(jìn)行分類實(shí)驗(yàn)前需分析地物特征,其中植被表現(xiàn)復(fù)雜的體散射,其回波能量適中,呈現(xiàn)出亮度適中且整體具有相似性的綠色信息;水體表現(xiàn)為單次的光滑表面散射,其回波能量較少,呈現(xiàn)亮度較低的偏黑色信息;道路表現(xiàn)為高亮的白色信息且具有細(xì)長型的特點(diǎn);建筑物表現(xiàn)為偶次散射,回波能量較高,呈現(xiàn)高亮粉白色信息;裸地表現(xiàn)單次散射,呈現(xiàn)為整體較均勻的淡紫色信息[16]。如圖3為實(shí)驗(yàn)區(qū)光學(xué)影像與極化SAR圖像對比圖:
3.2 極化特征向量提取
基于測量矩陣提取目標(biāo)的極化特征向量,散射矩陣S經(jīng)矢量化計(jì)算后得到相干矩陣T和協(xié)方差矩陣C,這兩個(gè)矩陣能夠反映全部的極化特性,其中的元素具有一定的物理意義。實(shí)驗(yàn)中提取相干矩陣的對角線元素T11、T22、T33以及協(xié)方差矩陣的對角線元素C11、C22、C33,和復(fù)數(shù)C12的模|C12|、相位角∠C12,復(fù)數(shù)C13的模|C13|、相位角∠C13,復(fù)數(shù)C23的模|C23|、相位角∠C2312個(gè)元素,組成極化特征向量。圖4為每個(gè)極化參數(shù)的圖像表示:

圖4極化參數(shù)圖像
3.3 紋理特征向量提取
基于經(jīng)典的灰度共生矩陣法進(jìn)行紋理特征向量的提取,提取信息熵(ENTROPY)、對比度(CONTRAST)、均值(MEAN)、相異性(DISSIMILARITY)、協(xié)同性(HOMOGENEITY)、一致性(UNIFORMITY)這六個(gè)紋理特征,組成紋理特征向量,每個(gè)紋理參數(shù)的圖像表示如圖5所示:

圖5紋理參數(shù)圖像
3.4 PolSAR圖像分類結(jié)果與分析
在進(jìn)行特征向量提取后,利用SVM分類器,進(jìn)行基于多極化特征與紋理特征的PolSAR圖像分類實(shí)驗(yàn)。為了檢驗(yàn)這種分類方法的效果,另外進(jìn)行了Wishart監(jiān)督分類,只加入極化特征的SVM監(jiān)督分類和只加入紋理特征的SVM分類,對結(jié)果進(jìn)行對比與精度分析。圖6為四種分類方法的結(jié)果對比圖,圖中綠色代表植被,藍(lán)色代表水體,黃色代表建筑物,黑色代表道路,粉色代表裸地。圖6(a)為Wishart監(jiān)督分類,圖6(b)為只加入極化特征的SVM分類結(jié)果,圖6(c)為結(jié)合紋理特征的SVM監(jiān)督分類結(jié)果,圖6(d)為結(jié)合極化和紋理特征的SVM分類結(jié)果:
圖6分類結(jié)果對比圖
由圖6可以看出,經(jīng)Wishatr監(jiān)督分類后5種地物被區(qū)分開來,但建筑物與裸地出現(xiàn)明顯錯(cuò)分現(xiàn)象,并存在嚴(yán)重的噪聲影響。只加入極化特征的SVM分類結(jié)果中,5種地物區(qū)分不明顯,水體較模糊,但噪聲影響有所改善。只加入紋理特征的SVM分類結(jié)果中,水體區(qū)分明顯,輪廓也較為清晰,但存在黃色建筑物的斑點(diǎn)狀況,建筑物、裸地與道路的劃分都較不準(zhǔn)確。而結(jié)合極化與紋理特征后,5種地物的劃分都有了很好改善,水體的輪廓更加清晰,噪聲影響也明顯減少。
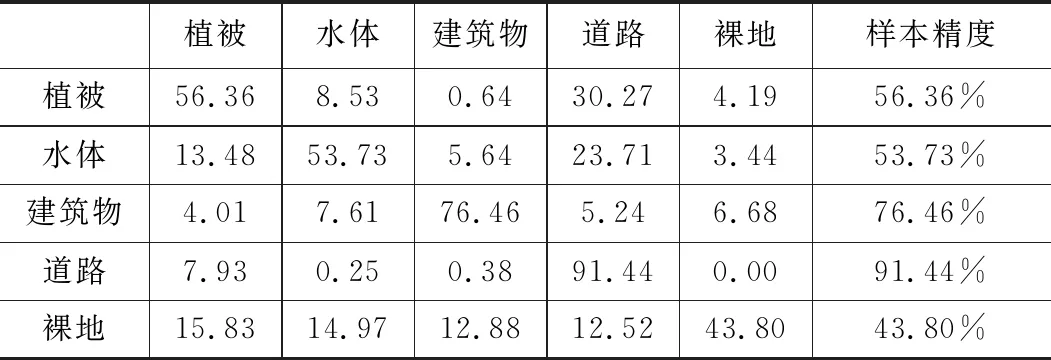
為進(jìn)一步將分類結(jié)果進(jìn)行對比,4種分類方法樣本的混淆矩陣如表2~表5所示:

Wishatr監(jiān)督分類樣本混淆矩陣 表2
結(jié)合極化特征的SVM分類樣本混淆矩陣 表3

結(jié)合紋理特征的SVM分類樣本混淆矩陣 表4

結(jié)合極化與紋理特征的SVM分類樣本混淆矩陣 表5
由樣本的混淆矩陣可以看出,Wishatr監(jiān)督分類中植被、水體和道路三種地物都得到大致區(qū)分,其中水體的樣本精度達(dá)到99.90%,但建筑物與裸地的分類精度不高。只加入極化特征的SVM分類得到的混淆矩陣顯示植被、水體、建筑物、裸地都出現(xiàn)明顯的錯(cuò)分現(xiàn)象,其樣本精度很低。只加入紋理特征的SVM分類實(shí)驗(yàn)中,水體的精度較高,但建筑物的樣本精度僅為44.52%,錯(cuò)分較明顯。結(jié)合極化與紋理信息的SVM分類結(jié)果中植被,水體,建筑物,道路,裸地五種地物的樣本精度綜合來看都高于另外三種監(jiān)督分類方法,說明本文的分類方法能夠有效改善分類效果。
4 結(jié) 語
本文提出了一種結(jié)合多極化特征向量與紋理特征向量的PolSAR圖像分類方法。首先闡述了算法原理;然后進(jìn)行實(shí)驗(yàn)驗(yàn)證,為了檢驗(yàn)本文方法的實(shí)驗(yàn)效果,又分別進(jìn)行了Wishart監(jiān)督分類、僅加入極化特征的SVM監(jiān)督分類和僅加入紋理特征的SVM PolSAR圖像分類實(shí)驗(yàn);最后將四種實(shí)驗(yàn)結(jié)果進(jìn)行對比與精度分析,從對比結(jié)果中可以看出,與其他三種分類方法相比,結(jié)合極化和紋理信息的SVM分類方法結(jié)果中五種地物都能得到準(zhǔn)確劃分,對道路、水體和建筑物的區(qū)分最為明顯,且噪聲影響較小,有效提高了分類精度。極化SAR圖像分類的研究還需進(jìn)一步探索,本文提出的分類算法對本文實(shí)驗(yàn)數(shù)據(jù)具有有效性,后續(xù)需要再應(yīng)用更多的實(shí)驗(yàn)數(shù)據(jù)來驗(yàn)證本文提出的分類算法。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52