基于空三成果的航攝影像快速配準方法研究
2019-07-05 09:41:42答星周勇兵朱傳勇徐夏炎滕松
城市勘測 2019年3期
答星,周勇兵,朱傳勇,徐夏炎,滕松
(武漢市測繪研究院,湖北 武漢 430022)
1 引 言
航空攝影利用航空器搭載專業航攝儀從空中對地面進行攝影,因其獲取速度快、幾何分辨率高,成為地理信息數據獲取的主要技術手段[1]。航空攝影測量在我國起步較早,相關部門積累了大量歷史航空影像資料,以基礎測繪的4D產品形式服務于城市規劃建設、自然資源調查、地質資源勘探等領域。特別是城市勘測院積累的大比例尺歷史航攝資料數據量日益增大、各類參數較多,傳統以文檔式管理或電子文件夾式存儲的模式,難以實現原始影像數據的快速調用,利用空間數據庫統一管理已成為目前主流模式。
航攝資料數據庫需實現對原始航攝影像數據的空間定位管理,以利于空間查詢等資料索引的需求。常用的影像配準方法包括正射糾正法和豎直投影法。正射糾正法是通過攝影測量理論或者圖像匹配技術,前者主要采用數字攝影測量工作站[2]進行,后者是依據計算機視覺理論,常用的匹配算法有最小二乘匹配[3]、Forstner算法[4]、SIFT算法[5]、SURF算法[6]等。正射糾正法雖然能夠獲得較高精度,但解算過程復雜,實用性不強。豎直投影法是直接采用外方位線元素(或POS線元素)以及影像參數,即以攝站點豎直投影到地面的交點作為影像中心對應的物方點(下文簡稱物方中心點),再利用影像大小和分辨率獲取其地面范圍。該方法未考慮內方位元素、外方位角元素,配準精度會受到影像中心偏移、姿態旋轉等因素影響,但數學模型簡單,解算速度較快。
一些專家學者在豎直投影法的基礎上做了改進,如孫海萍等利用像主點坐標、像幅寬度、像幅高度、攝影比例尺等信息估算影像四角點坐標,然后利用仿射變換完成影像空間配準[7]。但像主點坐標未利用影像的內外方位元素及DEM數據進行精度改正,尤其在影像邊緣及地面起伏大的區域,與實際位置仍存在較大偏移的現象。本文充分利用現有航攝資料及空三成果,采用中心投影共線方程進行物方中心點坐標的解算,最后通過仿射變換方法進行影像坐標配準。經實驗論證,其空間配準精度明顯提高,較好滿足航攝影像管理需求。
2 影像中心物方空間坐標解算
影像空間配準是航攝數據精細化管理關鍵步驟,最精確的方法為數字正射糾正,但糾正計算過程復雜,且增加糾正重采樣數據的存儲空間,耗時費力,此法不用于原始影像管理。通常具有空三成果的歷史航攝影像會采取分類存儲,即以磁盤存儲原始影像,以文件方式保存空三成果。后期調用時,需利用航攝略圖以及空三加密分區接合表進行資料索引。如將兩者有機結合,則能快速實現影像的空間配準,即首先獲取物方中心點平面坐標,然后通過平移或仿射變換進行空間配準。
2.1 豎直投影解算
物方中心點平面坐標獲取是影像快速空間配準的首要步驟。目前主要獲取方式是豎直投影解算法,如圖1所示。該方法將航攝相機曝光瞬間記錄的攝站點橫縱坐標近似作為物方中心點的平面坐標。
圖1中,S為攝影中心,c為影像中心點,C0為實際物方中心點,C1為豎直投影到地面的物方中心點。從圖中可看出,若影像中心嚴格落在攝站點下方,即過影像中心攝影光線為豎直向下,其解算物方中心點誤差較小(僅受線元素精度影響),若該攝影光線與豎直光線偏差較大時,其解算精度較差。造成精度較差的原因主要是其未考慮內、外方位角元素和地面起伏等因素,僅將航空攝影的中心投影成像簡單視為豎直投影成像。
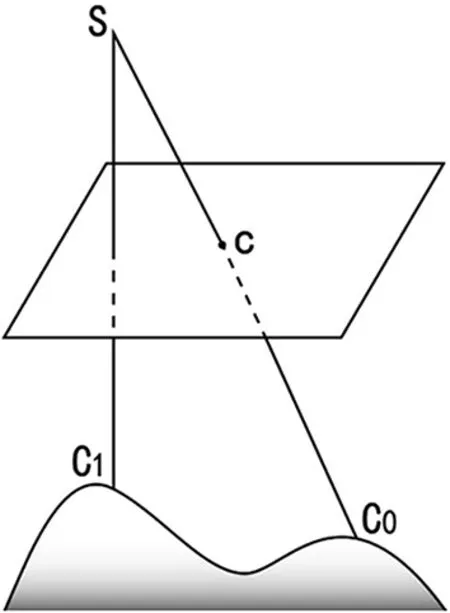
圖1 豎直投影解算法示意圖
2.2 中心投影解算
(1)中心投影解算原理
為提高物方中心點坐標解算精度,可采用空三成果中內、外方位元素,利用中心投影共線方程解算物方坐標,即攝影光線經影像中心與地面高程面的交點作為物方中心點。拍攝姿態俯仰角較大的影像,其解算后的物方中心點配準精度更易受高程精度的影響。快速獲取高程方法有兩種:根據航攝比例尺和攝站點高程計算;利用測區DEM數據迭代提取。中心投影共線方程描述了投影中心、像點、物點三點位于一條直線的關系,公式如下。
式中,x,y為像點的框標坐標,XA、YA、ZA為物點的物方空間坐標,x0、y0、f為影像內方位元素,XS、YS、ZS為攝站點物方空間坐標,ai、bi、ci(i=1,2,3)為影像外方位元素組成的方向余弦。
(2)實現方法和設計路線
通過共線方程解算物方中心點空間坐標,至少需要兩張相片進行前方交會。前方交會需要進行影像匹配和量測,計算過程復雜。本文采用單片過影像中心攝影光線和高程面相交的方法解算物方中心點平面坐標,并通過以下兩種方法獲取物方中心點的高程。
①固定比例尺法:利用航攝資料中的攝影比例尺、攝站點高程計算物點的平均高程,以該平均高程作為物方中心點的近似高程值,公式為ZA=ZS-scale×f。其中,ZA為物方中心點高程,ZS為攝站點高程,scale為航攝比例尺,f為相機主距。
程序設計路線:讀取相片大小、掃描分辨率、航攝比例尺以及內外方位元素等參數,利用公式解算物點平均高程,以平均高程作為物方中心點高程,并代入共線方程解算物方中心點平面坐標。
②DEM迭代法:采用DEM提取物方中心點高程,過影像中心攝影光線和DEM曲面相交的物點即為物方中心點。由于物方中心點高程是共線方程解算其平面坐標的條件之一,而利用DEM提取物方點高程又必須提供其平面坐標值,因此該方法是一個迭代趨近的過程,迭代之前可將固定比例尺法獲取的物方點平均高程作為計算迭代的初始值。
程序設計路線:除固定比例尺法參數外,還需讀取測區DEM數據。該方法需迭代進行解算,其程序框圖如圖2所示。

圖2 DEM迭代法程序框圖
3 仿射變換空間配準
經共線方程計算處理后的原始影像可獲取精度較高的物方中心點平面坐標,在此基礎上,通過攝影比例尺、像元大小、影像寬高等參數,能夠快速計算出影像四個角點的地面坐標,從而生成原始影像的坐標文件。影像坐標文件實際上定義了影像像素坐標與實際地理坐標間的仿射關系,具體計算公式如下。
x′=Ax+By+C
y′=Dx+Ey+F
式中,x′為像素對應的地理X坐標,y′為像素對應的地理Y坐標,x和y分別代表像平面坐標中的列號和行號,A和E分別x方向上和y方向上的像素分辨率,D和B分別為X和Y方向的旋轉系數,C與F為影像左上角像素的地理X坐標與Y坐標。
常規無坐標影像進行快速空間配準時若不考慮旋轉情況,D和B參數為零,僅需計算出角點地理坐標,便能重寫出坐標文件。原始影像的旋偏角是衡量航攝質量的重要參數之一,因此可對原始影像基于中心點旋轉,通過重新計算A~F參數,無須對原始影像文件進行重采樣處理,避免冗余數據產生。為解決這一問題,將旋轉前后點與旋轉角點看作等腰三角形,如圖3所示。假設矩形影像的左上角點(X1、Y1),繞其中心(X0、Y0)逆時針旋轉a角度后,新角點坐標位置(X2、Y2)則作為新的坐標文件中C和F參數,計算公式如下。
X2=(X1-X0)cosθ-(Y1-Y0)sinθ+X0
Y2=(X1-X0)sinθ+(Y1-Y0)cosθ+Y0
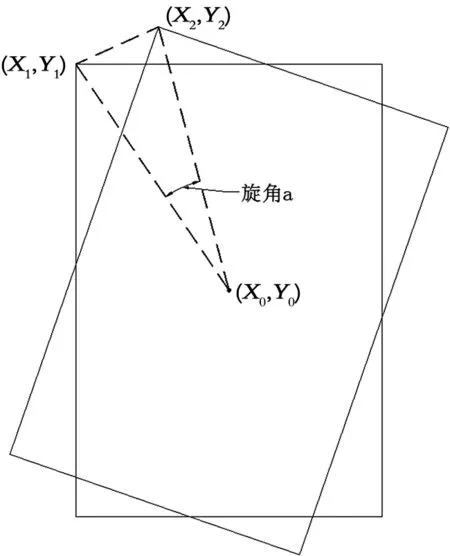
圖3 仿射變換示意圖
原始影像中的每一像元均可看作長寬為地面分辨率的正方形,而影像本身沿中心點旋轉過程并不改變像元長寬本身大小,如圖4所示。因此,其旋轉后新的旋轉參數應相等且不為零,如圖4所示。
B=D=原影像地面分辨率×sinα
A=-E=原影像地面分辨率×cosα

圖4 影像空間配準示意圖
4 實驗論證
4.1 實驗過程
本次實驗數據為武漢市2010年利用瑞士徠卡公司研制的UCX相機對中心城區及遠城區重點區域共計 3 412 km2進行大比例尺航空攝影,用以 1∶2 000基礎測繪4D產品生產。同年采用Z/I Imaging SSK軟件對整個測區 6 216張影像按自然地形分劃為12個加密區進行空三加密,最終空三成果以文件夾形式保存,UCX攝影參數如表1所示。

UCX攝影參數 表1
對加密成果區中的Photo定向文件及Camera相機進行信息提取,獲取每張影像的內、外方位元素、相機參數等信息。在ArcGIS軟件中將DEM影像數據轉換為DEM文本數據,便于后期程序進行高程提取。利用Python和Arcpy站點包進行程序開發,批量計算出原始影像的地面矩形覆蓋范圍(SHP格式)及原始影像坐標文件TFW,并將整理后單張影像的影像內、外方位元素等基本信息寫入到圖形文件屬性中,便于原始影像檢索。經計算后的原始影像圖形文件如圖5所示。

圖5 經計算后的原始影像圖形文件
4.2 精度對比與分析
對實驗影像分別采用豎直投影法、中心投影法(固定比例尺、DEM迭代)進行影像空間配準,將配準后影像與區域內現有矢量數據疊加進行檢驗,并選取平原與丘陵兩種局部區域成果進行對比,如圖6所示。

圖6局部成果對比圖
從目視判讀來看,中心投影法配準的影像與現有矢量數據空間配準度明顯優于豎直投影法。在影像中選取若干特征點,計算其與實際位置的偏移值,得到精度統計如表2所示。

精度統計列表 表2
從表2看出,中心投影方法的精度明顯優于豎直投影法,其中DEM迭代法又更加優于固定比例尺法。主要原因是航攝瞬間的攝影比例尺無法完全固定,其實際比例尺會隨著地形起伏或飛行航高變化而在一定區間內浮動所致。
中心投影法進行影像空間配準分為物方中心點解算和仿射變換空間配準兩步。在初始比例尺較為準確的情況下,中心點坐標精度較高(實驗中一般<1 m)。而影像空間配準采用仿射變換完成,通過物方中心點坐標、影像旋片角、地面分辨率、影像寬度及高度解算影像左上角物方空間坐標,地面分辨率則直接采用掃描分辨率和初始比例尺的乘積,沒有考慮區域內地形起伏的影響,因此導致影像的空間配準精度呈“中間高,四周低”的特點。
5 結論與展望
基于攝影測量相關理論,利用現有空三成果,本文提出一種針對原始航攝影像的快速空間配準方法。其核心思想為通過攝影光線與高程面相交獲取影像中心物方空間坐標,再利用仿射變換進行影像空間配準。經利用2010年UCX航攝影像實驗表明,其精度明顯優于豎直投影方法,滿足航攝影像管理需要,且解算速度快,無須對原始影像進行重采樣處理。對于無人機等飛行姿態較為不穩定的原始影像,更加利于推廣使用。當然,該方法尚有不足之處,即影像邊緣處和地形起伏較大區域的精度較差,后續再做改進。