三維激光掃描技術在城市建筑物高精度建模中的應用
2019-07-05 09:41:42李強
城市勘測 2019年3期
李強
(沈陽市勘察測繪研究院,遼寧 沈陽 110004)
1 引 言
三維激光掃描技術被稱為“實景復制技術”,其能快速獲得原始的測繪數據,并完整、高精度地重建實體[1]。與激光測距技術點對點的測量方法不同,地面三維激光掃描技術使傳統的人工單點數據獲取變為連續自動獲取批量數據,提高了量測的精度與速度[2]。地面三維激光掃描將傳統的點測量發展為面測量,可以高效率、高質量、低成本地獲取海量的空間數據,充分體現測量目標的特征信息。采集到的數據經過處理,可以直接為CAD等軟件使用構建高精度模型框架,還可以將真實的紋理映射到模型框架上,生成三維模型。
本文以沈陽K11購物藝術中心為實例,采用Leica Scan Station P40三維激光掃描儀對其進行了掃描測量,利用全站儀測量對掃描精度進行了評定,并以此為基礎構建了高精度三維模型,取得了較好的效果。
2 工程概況和作業流程
2.1 工程概況
本文的測量對象為沈陽K11購物藝術中心,位于青年大街渾河北岸,其建筑面積約26萬平方米。整個綜合體項目集合K11購物藝術中心、沈陽新世界博覽館、五星級酒店、寫字樓、服務式公寓等業態于一體,是沈陽市最大的單體建筑。整個綜合體外形設計現代時尚,正面博覽館設計具有傾斜線條美,整體向外傾斜,由多個方塊結構錯亂有序地疊置在一起,頂部形如“大鵬展翅”,如圖1所示。這些對于傳統的測量方式都是極大的挑戰。

圖1 沈陽K11購物藝術中心效果圖
2.2 作業流程
三維激光掃描技術應用于建筑物三維建模的作業流程主要可分為三大部分:外業數據采集、內業數據處理和實體建模,其流程圖如圖2所示。
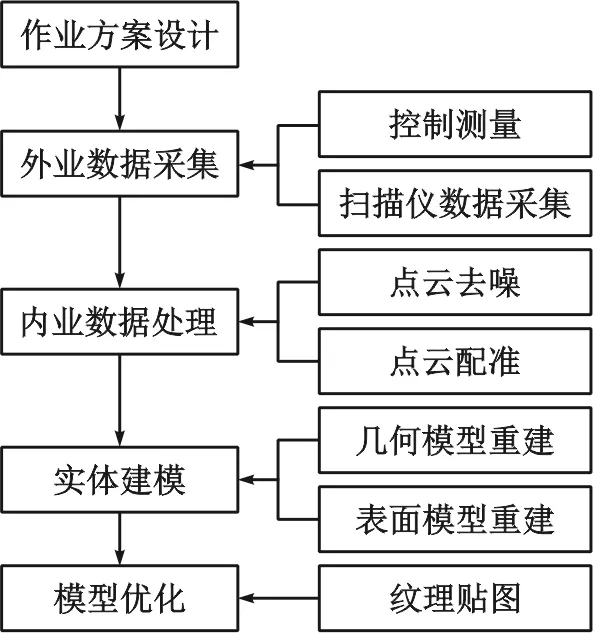
圖2 作業流程圖
3 外業數據采集
3.1 掃描方案設計
此次掃描采用的是Leica Scan Station P40三維激光掃描系統,其主要性能優勢有以下三點:
(1)掃描速度快,精度高,掃描范圍廣。掃描速率最高可以達到 1 000 000點/秒,點密度最高可以達到 2 mm/10 m,其最遠射程可達 270 m,點位精度可以達到毫米級別。
(2)集成了高分辨率相機。掃描儀機身集成了自動調焦的數碼相機,在進行激光掃描的同時獲取掃描場景的高清照片,可用作三維模型數據的紋理貼圖。
(3)配備了專業的點云后處理軟件。利用專業的點云后處理軟件,可以更加方便和高效地處理海量點云數據,提取高精度的特征點、線、面,制作三維模型。
方案制定應考慮三個方面問題:①站點布設。測站布設應考慮掃描數據的完整性,保證測站間的通視,測站與測站之間不小于20%的重疊度。②設置掃描分辨率。根據不同的掃描距離設置不同的掃描分辨率。③標靶布設。各測站重疊區域應布設了不少于3個的公共標靶,并盡量避免位于同一條直線上。最終確定在K11周圍布設26個測站,其中在K11周圍布設了20個測站,K11頂部布設了6個測站。
3.2 控制測量
為了更精確地獲得建筑物的三維坐標,以便將三維模型成果納入沈陽市平面坐標系統和高程系統中,我們在建筑物周圍布設了8個控制點。控制點采用的是網絡RTK現場布設的方式,利用了“沈陽市連續運行衛星定位城市測量綜合服務系統(SYCORS)”和沈陽市似大地水準面,RTK定位精度可以達到 2 cm左右。
3.3 掃描儀數據采集
根據制定好的掃描方案完成對建筑物的三維激光掃描,同時利用掃描儀集成的相機獲取掃描場景的高清照片。為保證點云配準精度,在場景掃描完成后,對公共標靶以及測量控制點進行掃描,以便后期點云配準。
4 內業數據處理
4.1 點云數據去噪
外業數據采集完成后,需要去除點云數據中的噪聲點,其結果直接影響后期建模的質量。點云數據中的噪聲來源主要有兩種:一是外界因素干擾,譬如目標前方遮擋物、掃描有效范圍外的地物點;二是激光多路徑干擾,由于激光光束的離散度,使得一個發射光束可接收到不同實體返回的反射光束而產生噪聲以及激光穿透透明物體造成的噪聲點。
因不同實體反射而產生的噪聲點可在點云后處理軟件中利用濾波方法處理,其原理是通過在指點區域內采用賦有權重的高斯分布,可以在保留原有點云數據特征的前提之下有效地過濾掉指定區域內的高頻信息,去除噪點;因遮擋物和激光穿透造成的噪聲點,可在Leica Cyclone中通過人工交互的方式批量去除,僅保留掃描目標表面的點云數據。
4.2 點云數據配準
點云數據配準就是將基于各個測站的掃描點云數據合并為一個完整統一坐標系下的點云[8],其方法主要有三種:基于標靶的配準,基于多視點云的配準和基于控制點的配準。
基于標靶的配準方法通過精確識別同名標靶完成配準,配準精度較高,處理流程為自動化;基于多視點云的配準方法是基于具有一定重疊區域的點云,通過人工交互指定同名點完成配準,一般作為不宜布設標靶情況下的補充手段;基于控制點的配準方法是通過識別已知坐標信息的控制點,將點云數據統一到特定的坐標系統中,配準的精度取決于控制點識別的精度以及控制點測量精度。
本次的點云配準主要是通過基于標靶的方式分別完成地面布設的20站和K11頂部6站的點云配準,之后這兩大部分的點云數據采用的是基于多視點云的配準方式合并成一個整體,最后利用基于控制點的配準方式將點云數據納入沈陽市平面坐標系統和高程系統中,拼接后的點云數據如圖3所示。
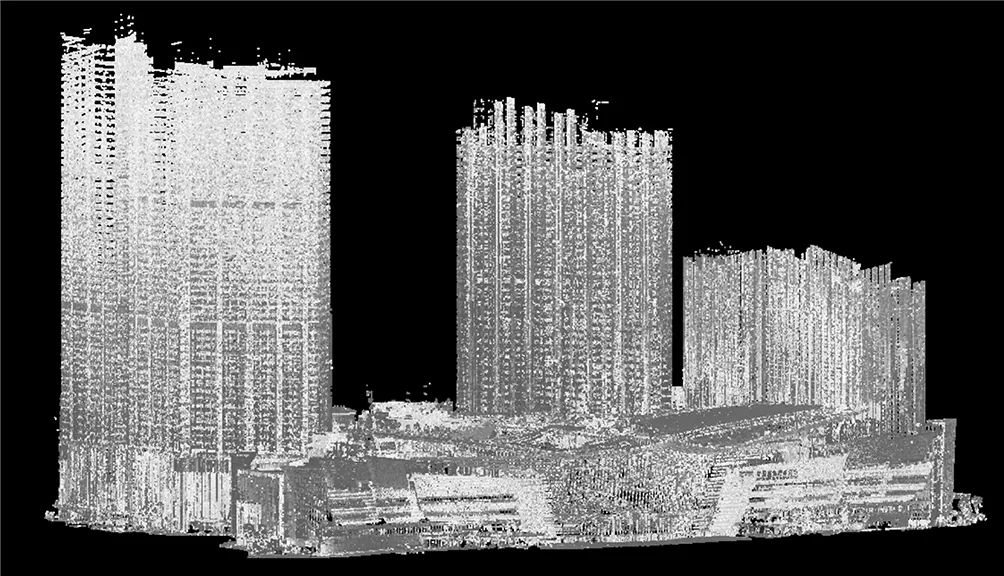
圖3 拼接后的點云數據
4.3 點云數據精度分析
(1)測量精度分析
點云數據的點位精度誤差來源主要包括:儀器測量誤差和點云配準誤差。
三維激光掃描儀的儀器測量誤差主要包括測角誤差和測距誤差,這兩方面誤差對點云點位精度的影響為[8]
(1)
式(1)中md為儀器測距誤差,mβ為儀器測角中誤差,D為測站點和目標指點的距離。Leica P40的測距誤差為 1.2 mm+10 ppm,測角誤差為8″,掃描目標與儀器距離大約為 50 m,則可計算得到儀器測量誤差為m1=3 mm。
本次點云配準中誤差m2=5 mm,根據誤差傳播定律,點云數據的誤差理論值為:
(2)
根據式(2),可得點云理論上點位中誤差為m=5.8 mm。
(2)測量結果對比分析
本次檢核在點云模型上選取并量測了掃描對象10條特征邊長,然后和全站儀觀測數據進行了對比分析,測得的數據如表1所示。其中邊長較差最大值為 3.3 cm,中誤差為 1.3 cm,相對誤差在1‰以下。測量精度滿足《城市測量規范》(CJJ/T 8-2011)中1∶500 DLG成圖標準。

掃描儀與全站儀邊長測量數據對比 表1
5 實體建模
一般來講,利用點云數據進行三維模型重建主要有兩種方法:一種是幾何模型重建,也就是建立輪廓模型;另一種是表面模型重建,主要是構造不規則三角網來表示物體表面。
前者是在點云模型上面提取建筑物的特征線,生成CAD模型框架,適用于較規則的建筑物實體建模;后者構網方法簡單,適用于對不規則連續曲面的模擬,但是數據量較大,處理相對復雜。本次建模對K11的主體結構采用第一種方法,對其翼型屋頂及其他不規則曲面的藝術造型部分采用第二種方法。
5.1 幾何模型重建
較規則的建筑物其形狀一般可以由特征線來定義,特征線一般包括建筑物的邊界線、輪廓線、屋脊線等等,特征線提取的過程即是通過三維點云復原其建筑結構圖的過程。
特征線的提取主要有三種方式:①特征點擬合法,即在三維點云模型中選取若干特征點,通過特征點擬合獲得特征線,該方法適用于提取曲線形狀的特征線;②切片法,通過定義切平面,提取某一高度區間的點云,這些點云形如一連串密集碎部點,根據一定的取舍原則連接起來即是建筑物的特征線,該方法適用于分層繪制建筑物的特征線;③投影法,通過定義不同的投影面,將三維點云模型投影到二維平面,繪制特征線,該方法適用于建筑物立面圖的繪制。
利用Leica Cyclone軟件,綜合運用上述三種特征線提取方法,根據特征線完成幾何模型的重建,結果如圖4所示。
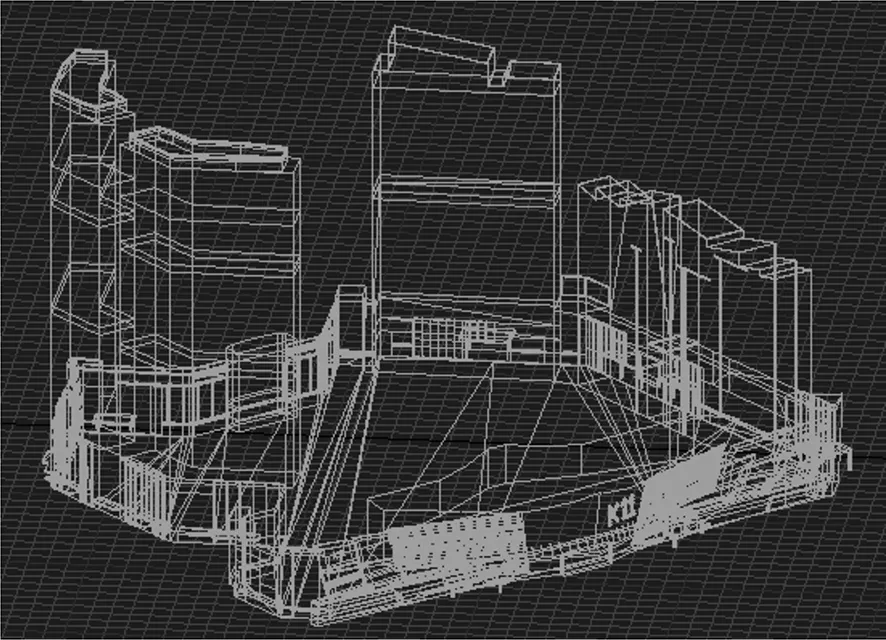
圖4 幾何模型重建成果圖
5.2 表面模型重建
(1)構建不規則三角網
在Leica Cyclone軟件中將目標點云孤立出來,構建不規則三角網,模擬對象表面形態特征。構網比較常用的是Delaunay三角網,可以有效地避免狹長三角形的出現,提高表面重建的精度。
(2)三角網模型化簡
由于掃描點云比較密集,構建不規則三角網難免產生數據冗余,譬如一個平面兩個三角網即可表達,但實際生成的三角網個數會有很多,造成數據冗余。為此需要在保證精度的前提下對三角網模型進行適當的化簡,在曲率較大的地方保留足夠多的數據點,在曲率小的區域保留較少的數據點,而不是簡單地均勻抽稀,以減小數據冗余。
(3)三角網模型優化
由于目標的復雜結構以及掃描距離、范圍的限制,最終掃描結果可能會有部分數據不是很完整,在構建三角網時會造成表面空洞。這就需要根據建筑物的表面特征來進行數據補充,形成比較完整的三角網模型,譬如對于屋頂的屋脊線以及邊緣輪廓線進行重點增強處理。通過三維表面模型重建的“翼型屋頂”如圖5所示。
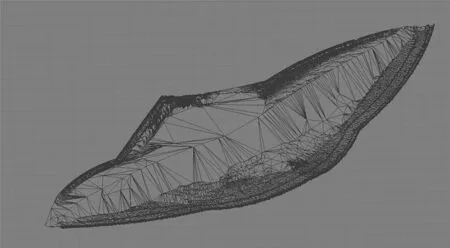
圖5 三維表面模型重建效果圖
5.3 模型優化
為了增加模型的逼真性和現實性,可以在三維模型上增加紋理使其成為具有紋理屬性的三維模型。利用掃描儀拍攝的高清相片可以制作紋理貼圖,再通過3ds Max進行紋理貼圖和三維渲染,使建筑物模型更具有美感,模型更加逼真。制作好的三維模型如圖6所示。
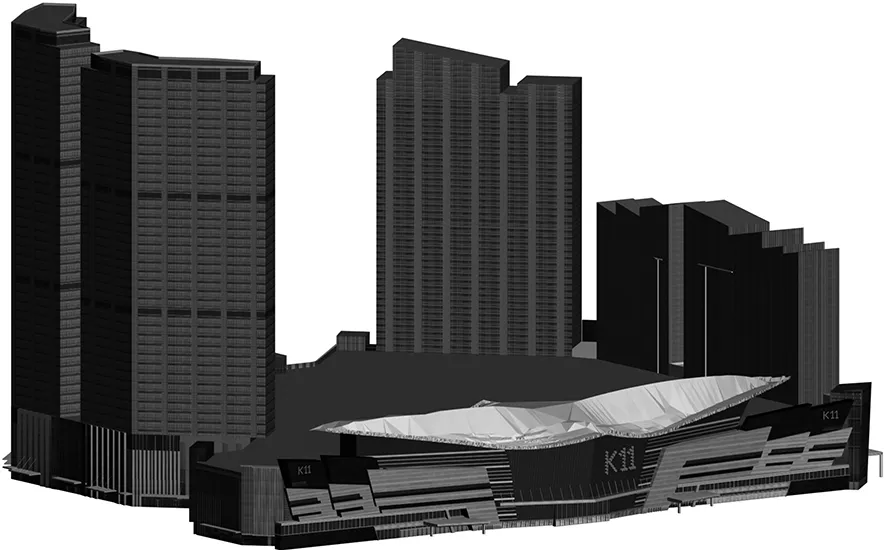
圖6 K11三維模型
6 結 語
地面三維激光掃描測量儀使得傳統的單點采集數據的測量方式變為密集、連續地自動獲取數據的測量方式,獲取的信息量也從點的空間位置信息擴展到目標的紋理和顏色灰度信息。本文以沈陽K11藝術購物中心為例,驗證了利用三維激光掃描技術制作高精度三維模型的有效性和可行性。利用三維激光掃描技術進行復雜建筑物的高精度三維建模將是未來發展的一個方向,如何快速、自動地提取特征線,完成紋理映射,提高建模效率則是需要研究的地方。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19