復雜水域船舶智能避碰專家系統設計
2019-07-03 09:34:08
船海工程 2019年3期
(大連海事大學 綜合運輸研究所,遼寧 大連 116026)
復雜水域船舶密度較大,航行環境多變,發生碰撞事故的風險較高[1],準確地確定碰撞危險度是實現船舶智能避碰的前提之一[2-3]。已有的研究考慮碰撞影響因素較少(大多考慮船位、航速、航向等因素),未能體現風、浪、流及能見度的影響[4-6],并且計算碰撞危險度后,少有研究給出具體的航行方案和航行提示。因此,考慮設計一種利用原始數據計算復雜水域中碰撞危險度的方法,將復雜水域中環境危險和船舶危險區別對待,提出環境危險度的概念及計算方法,設計專家系統,構建避碰規則庫,根據不同的環境和碰撞危險,給出相應的避碰方案,為駕駛員提供航行參考。
1 碰撞危險度計算
1.1 數據處理
選取復雜水域中兩船相對航速(同時考慮兩船航速以及航向)、距離、能見度、風、浪、流為碰撞主要影響因素。兩船相對航速利用幾何學的矢量合成得到,見圖1,航向不在影響因素中單獨列出。
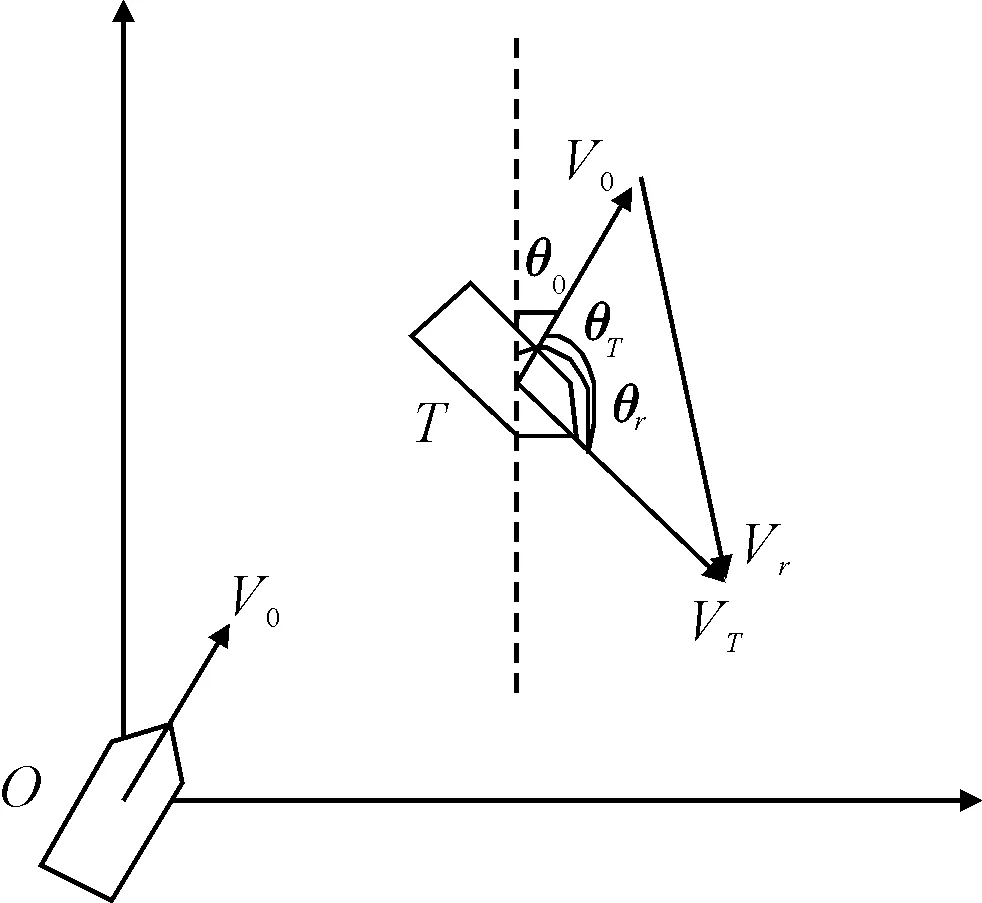
圖1 相對航速示意
利用模糊理論對碰撞影響因素進行模糊化處理。其中,由于航速跨度較大(0~30 kn),所以利用二元對比排序法確定其隸屬度,其他影響因素用模糊分布方法確定隸屬度。
(1)
根據對海上避碰行為的研究,航速的模糊集分別用A(Vi)表示超低速(0~5 kn)、B(Vi)表示低速(0~10 kn)、C(Vi)表示中速(5~15 kn)、D(Vi)表示中高速(10~20 kn)、E(Vi)表示高速(15 kn以上),U={V1,V2,V3,…,Vn}為給定的航速論域,利用二元對比排序法設計算法,確定論域U中的元素隸屬于模糊集超低速A(Vi)的隸屬度μA(Vi)。
步驟1。對任意的Vi?(0,5),μA(Vi)=0。
步驟2。對任何一對Vi、Vj∈U進行比較,得到以Vj為標準Vi隸屬于A(Vi)的程度值fVj(Vi),以及以Vi為標準Vj隸屬于A(Vi)的程度值fVi(Vj)。
作如下假設:
(2)
可以得到相對隸屬程度矩陣如下。
(3)
步驟3。計算相對優先度函數f(Vi/Vj)。
(4)
或
(5)
步驟4。以相對優先度f(Vi/Vj)為元素構造相對優先矩陣G。
(6)
步驟5。對相對優先矩陣的每一行取最小值或平均值,即可得論域U中的元素隸屬于模糊集超低速A(Vi)隸屬度μA(Vi)。
(7)
或
(8)
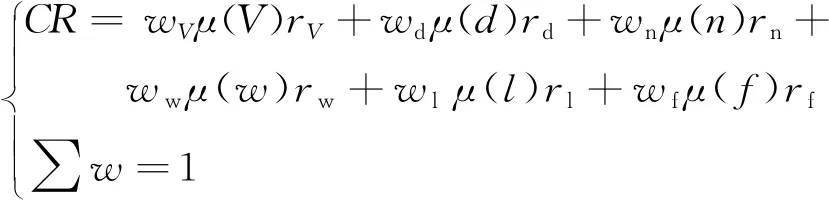
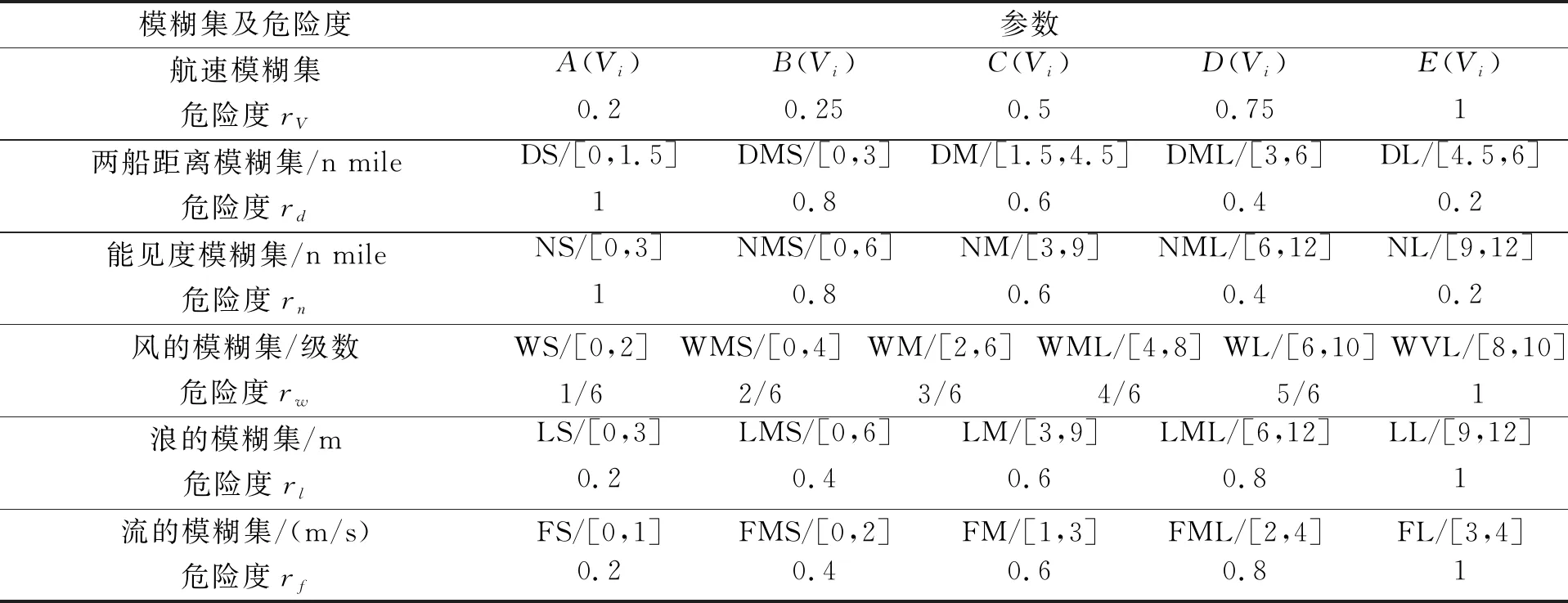
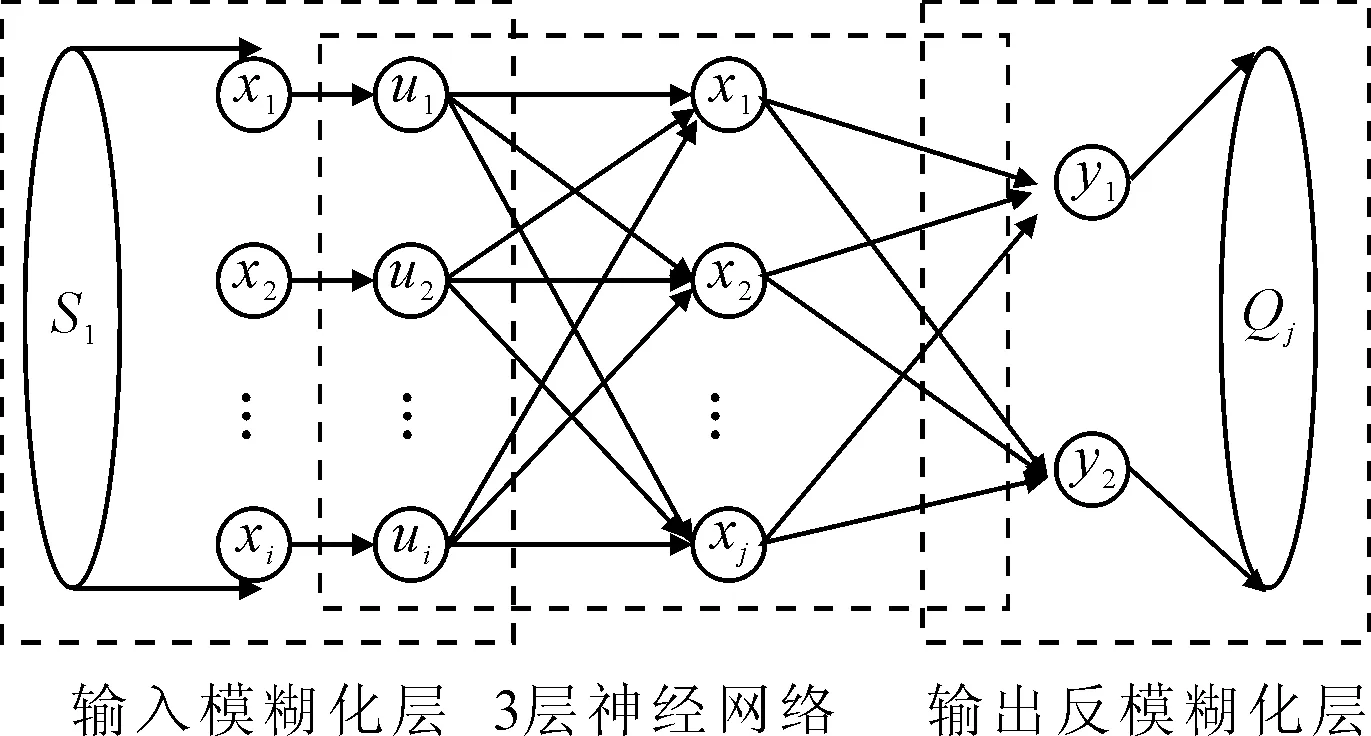
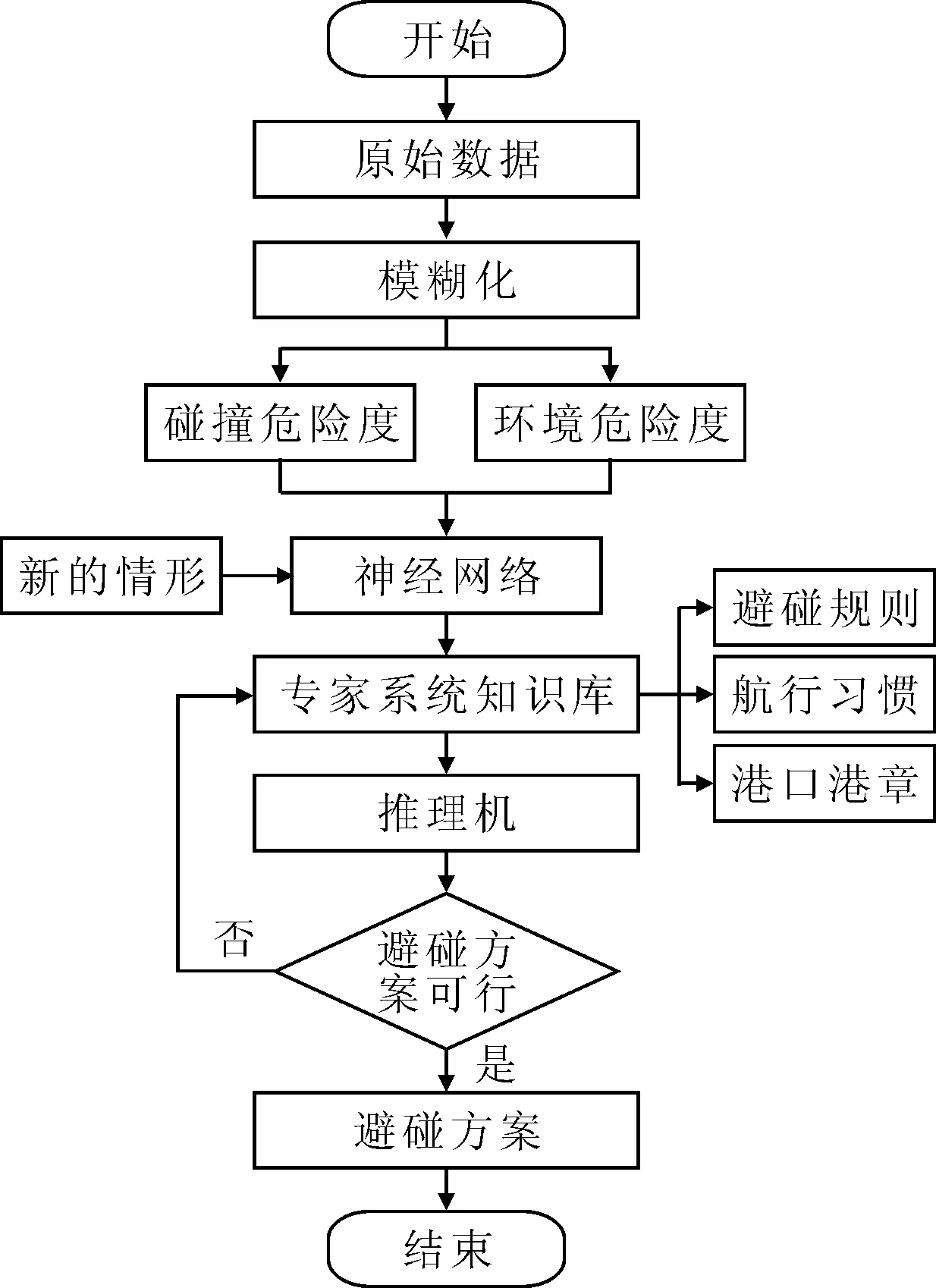
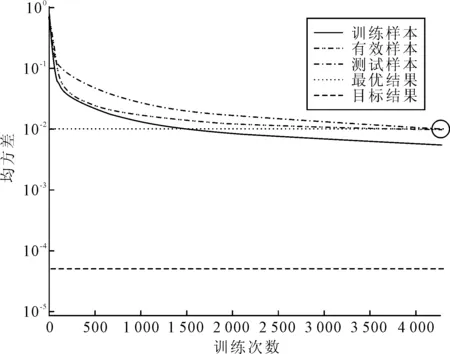
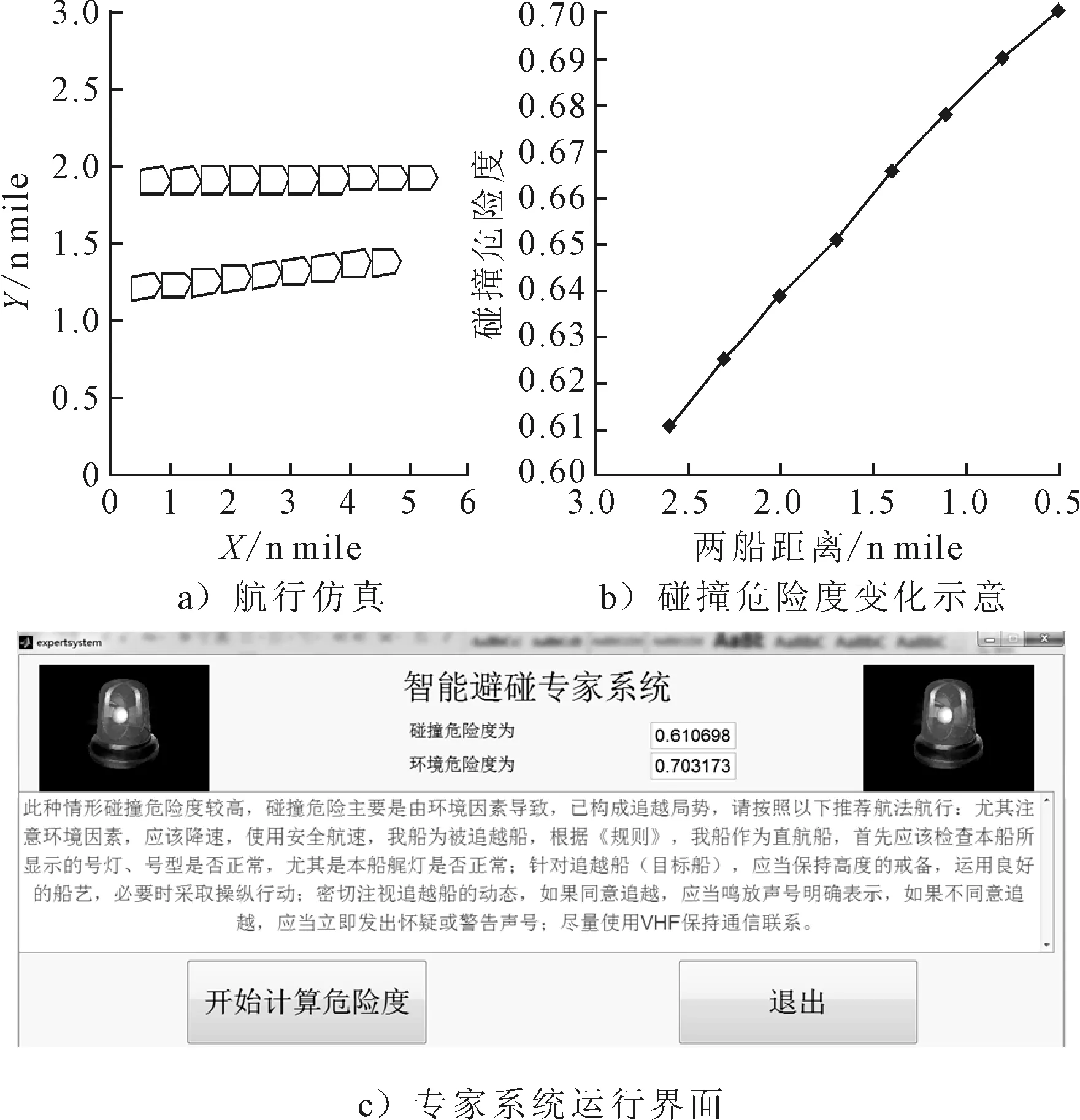
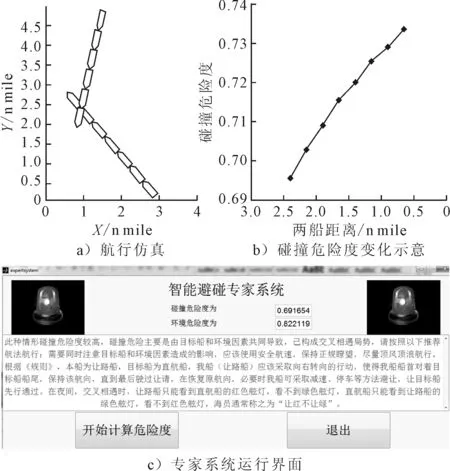
對于模糊集B(Vi)低速(0~10 kn)、C(Vi)中速(5~15 kn)、D(Vi)中高速(10~20 kn)、E(Vi)高速(15 kn以上)隸屬度的確定同理,不過在步驟2相對隸屬程度的確定中,有些許差異,例如確定元素Vi隸屬于模糊集B(Vi)的隸屬度,如果0 (9) 其他模糊集的隸屬度同理。 一般認為兩船相距>6 n mile,不致構成緊迫局面,因此將兩船距離分為5個模糊集,分別為很近(DS)、較近(DMS)、中等(DM)、較遠(DML)、很遠(DL),而在確定這5個模糊集的隸屬度時,采用模糊分布的方法,選擇最常用的隸屬函數(三角形隸屬函數)來進行量化,結果見圖2。 圖2 兩船距離的隸屬度示意 能見度、風、浪、流的隸屬度確定方法同理,其中能見度的模糊集為 {極差NS,較差NMS,中等NM,較好NML,良好NL}。 風的模糊集為 {小風WS,較小風WMS,中等風WM,較大風WML,大風WL,極大風WVL}。 浪的模糊集為 {輕浪LS,較輕浪LMS,中浪LM,較大浪LML,大浪LL}。 流的模糊集為 {弱流FS,較弱流FMS,中流FM,較強流FML,強流FL}。 定義1[7]。船舶碰撞危險度(collision risk, CR)表示船舶在其航行過程中發生碰撞危險的可能性大小及相應碰撞程度的重要參數。 根據定義1,構建計算方法。 (10) 式中:CR為碰撞危險度,取值范圍為(0,1);w為每個影響因素的重要程度;μ為每個影響因素的元素對于某個模糊集的隸屬度;r為某個模糊集的危險度。參考文獻[8]的方法,碰撞影響因素的重要程度值w分配如下:wV=0.21,wd=0.29,wn=0.18,ww=0.12,wl=0.11,wf=0.09。 定義2。環境危險度(collision risk of environment, CRE)為在特定的航行環境下,由于環境因素(包括能見度、風、浪、流等)造成的船舶之間碰撞的可能性,是衡量環境危險程度的重要參數。 (11) 不同影響因素的不同模糊集賦予不同的危險度,見表1。 構建兩個神經網絡模型:碰撞危險度神經網絡和環境危險度神經網絡。模糊神經網絡主要由數據庫、樣本庫、推理機制等三部分構成,其具體結構見圖3。 表1 不同影響因素的各種模糊集對應的碰撞危險度 圖3 模糊神經網絡結構 1)輸入模糊化層,包括n個碰撞危險度影響因素的輸入節點xi和模糊隸屬度節點μi,二者連接為隸屬度傳遞函數,具體見1.1。 2)3層神經網絡,包括隸屬度節點μi、基于樣本庫和推理機制進行學習的隱含節點xj以及輸出節點yi,其中 xj=f(wij+bi) (12) wij為節點之間的權重,f為傳遞函數,bi為偏置; 3)輸出反模糊化,將輸出節點yi經過反模糊化后得到輸出結果。 專家系統由三部分構成,數據庫、知識庫和推理機,具體工作流程見圖4。 圖4 專家系統流程 在計算碰撞危險度時,輸入節點為相對航速(V)、兩船距離(d)、能見度(n)、風(w)、浪(l)、流(f),構建了一個6輸入1輸出的神經網絡,隱層節點的個數采用2n+1=13個。 構建了含86條樣本的樣本庫,以供神經網絡學習。從圖5可以看出經過4 287次訓練后,均方差開始收斂,碰撞危險度的擬合值和實際值見圖6,可見經過訓練后的神經網絡計算碰撞危險度較為準確,誤差較小,不超過0.03。 圖5 碰撞危險度神經網絡訓練結果 圖6 碰撞危險度擬合值和實際值比較 在計算環境危險度時,同樣選取了86種航行情況,利用式(11)進行計算,輸入節點為能見度(n)、風(w)、浪(l)、流(f)4種環境危險度影響因素,輸出為環境危險度,構建了4-9-1的3層BP神經網絡。 圖7 環境危險度神經網絡訓練結果 從圖7可以看出經過1 073次訓練后,均方差開始收斂,環境危險度的擬合值和實際值對比見圖8,可見經過訓練后的神經網絡計算環境危險度的效果較好,誤差較小,不超過0.01。 圖8 環境危險度擬合值與實際值比較 在復雜水域實際船舶航行中,主要有3種會遇態勢:對遇、追越、交叉相遇,《1972年國際海上避碰規則》對不同的會遇態勢下采取避碰行動有不同的規定,船舶智能避碰專家系統分別對這3種會遇態勢進行實驗驗證,實驗中的兩艘船舶參數見表2,同時,設計了3種航行仿真情況,3種航行情況的參數見表3。 表2 實驗船舶參數 表3 航行情況參數 1)情形分析一。兩船航行的仿真模擬見圖9a),利用提出的計算碰撞危險度的方法結果見圖9b),可見隨著兩船距離的減少,碰撞危險度逐漸增加。 將航行參數輸入后,如有危險,會出現警告提醒界面,同時觸發警報裝置,提醒駕駛員注意。而后會顯示見圖9c)的避碰方案界面,同時顯示碰撞危險度和環境危險度,避碰專家系統判斷出該種局勢已構成對遇局勢,并且提示駕駛員導致碰撞的重點原因是船舶,應重點注意目標船的動態,給出避碰方案。 圖9 情形一 2)情形分析二。兩船航行的仿真模擬及碰撞危險度的變化見圖10a)、b),可見兩船的碰撞危險度隨距離的減小近乎于呈線性上升,智能避碰專家系統判斷的結果見圖10c),同時也會觸發警告界面和警報裝置。隨后計算出開始時碰撞危險度約為0.611,環境危險度約為0.703,環境因素導致的碰撞危險較大,并且該種情形構成了追越局面,推薦航行方案如專家系統界面所示,尤其注意環境因素,遵守避碰規則,有效實現避碰。 圖10 情形二 3)情形分析三。兩船航行的仿真模擬見圖11a),碰撞危險度的變化見圖11b),可見情形開始時碰撞危險就高達0.692,并且隨著兩船距離減少,碰撞危險增加。系統在觸發警告界面和警報裝置后,顯示界面見圖11c),判斷出該種情形的碰撞危險主要由目標船和環境因素共同導致,并且構成了交叉相遇局勢,根據避碰規則和航行習慣,給出航行方案。 圖11 情形三 1)對遇、追越、交叉相遇3種會遇態勢仿真結果表明,所設計的復雜水域智能避碰專家系統可以根據原始數據直接計算出碰撞危險度和環境危險度,并且能夠根據危險度和航行環境,提示駕駛員重點注意的碰撞影響因素,給出不同的航行提示和建議,符合避碰規則和航行習慣。 2)在實際航行中,兩船航速、航向、距離、能見度等信息可以通過AIS和雷達得到,風、浪可以通過風速記錄儀測得,海流可以通過多普勒計程儀和GPS顯示的船舶對地、對水航速推算得到,因此可以結合實時的船舶航行數據與智能避碰專家系統進行判斷,具有應用價值。 3)在提出環境危險度時,已考慮能見度、風、浪、流等多個氣象環境影響因素,實際上淺水效應和岸壁效應等航行環境的作用也不容忽視,所以今后應結合淺水效應和岸壁效應對危險度作更深入的研究。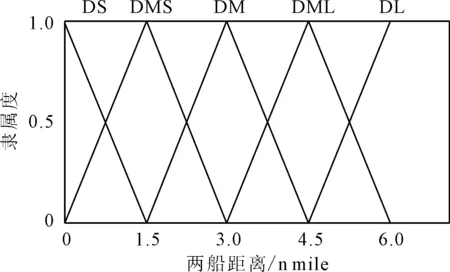
1.2 碰撞危險度計算

2 系統構建
2.1 神經網絡模型的構建
2.2 專家系統的構建
3 仿真和結果分析
3.1 神經網絡模型的訓練
3.2 專家系統的實現


4 結論
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中老年保健(2022年5期)2022-08-24 02:36:04
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年12期)2021-08-24 03:30:40
當代陜西(2021年12期)2021-08-05 07:45:46
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中國生殖健康(2019年11期)2019-01-07 01:28:02
冰雪運動(2016年4期)2016-04-16 05:54:56