梯度域和深度學習的圖像運動模糊盲去除算法
2019-07-02 12:12:32郭業才鄭慧穎
實驗室研究與探索 2019年6期
關鍵詞:方法
郭業才, 鄭慧穎, 葉 飛
(南京信息工程大學 a.江蘇省大氣環境與裝備設計協同創新中心, b.電子與信息工程學院, 南京 210044)
0 引 言
在獲取圖像時,可能由于外界環境或成像設備等原因,使得圖像存在不同程度的退化降質,如模糊、噪聲等,這些退化降質的數字圖像對人們的生產生活有著極大的影響。因此,去除模糊,得到清晰圖像非常重要。現有的圖像去模糊算法主要有:①利用自然圖像的邊緣先驗信息恢復清晰邊緣[1-7]。這些先驗信息對圖像去模糊是有效的,但需要解決非凸性問題。此外,優化方法和模糊核估計過程均很復雜,會導致計算成本較高。②運用深度學習網絡實現圖像去模糊[8-15]。目前,利用深度學習的方法實現圖像去模糊,在去卷積的過程中會使圖像過于平滑,導致圖像的高頻信息和圖像紋理細節丟失,這樣不僅花費時間較長,而且會導致圖像的振鈴效應更加明顯。
本文針對現有圖像去模糊方法的不足,提出一種基于梯度域和深度學習的圖像運動模糊盲去除算法。該算法利用圖像梯度域減少無關細節的影響,提高模糊核估計的魯棒性。結果表明,該算法在有效保持邊緣信息、顯著減少振鈴效應的同時,去模糊效果較好。
1 圖像去模糊原理及方法
圖像降質退化過程如圖1所示。輸入圖像x,在模糊核k和噪聲n影響下,得到模糊圖像為
y=k[x]+n
(1)
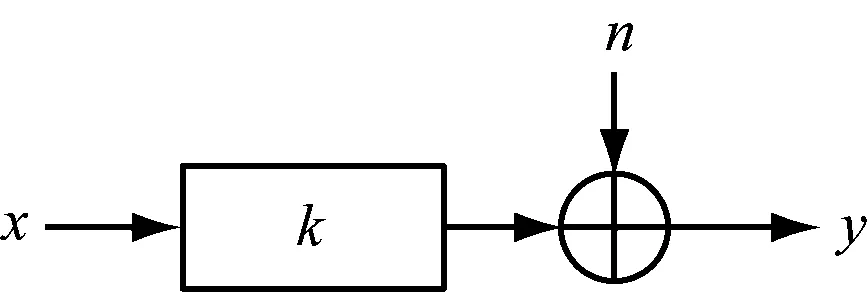
圖1 一般圖像退化模型
圖像盲去模糊即模糊核未知,需要從模糊圖像y中獲取清晰圖像x和模糊核k。盲去模糊問題可以將求解出的模糊核轉變為非盲去模糊問題,即
(2)
式中:?表示卷積操作;式中第1部分是數據保真項,利用L2范數進行約束;第2部分是先驗正則約束項,它與原始清晰自然圖像有關,λ是使約束項和數據保真項之間比例平衡的參數,正則項的選擇與選取的圖像先驗有關。
圖像盲反卷積問題的不適定性可以通過正則化方法解決,本文通過CNN的容錯能力、并行處理能力和自學習能力,將CNN可以學習圖像自身特征的性能用于去模糊的問題中,設計了一個有效的CNN網絡結構。
2 圖像運動模糊盲去除算法
2.1 圖像預處理
首先,將引導濾波[16]后的圖像作為基礎圖像,以減少噪聲和多余細節的影響。然后,將L0濾波[5]后梯度域圖像以及對應的清晰圖像作為樣本,對設計的CNN進行訓練。本文中,引導濾波和L0濾波都是作用在清晰圖像上的,可以抑制無關細節,增強圖像的清晰邊緣,提高了模糊核估計的魯棒性。圖2為圖像預處理部分的結構流程圖。
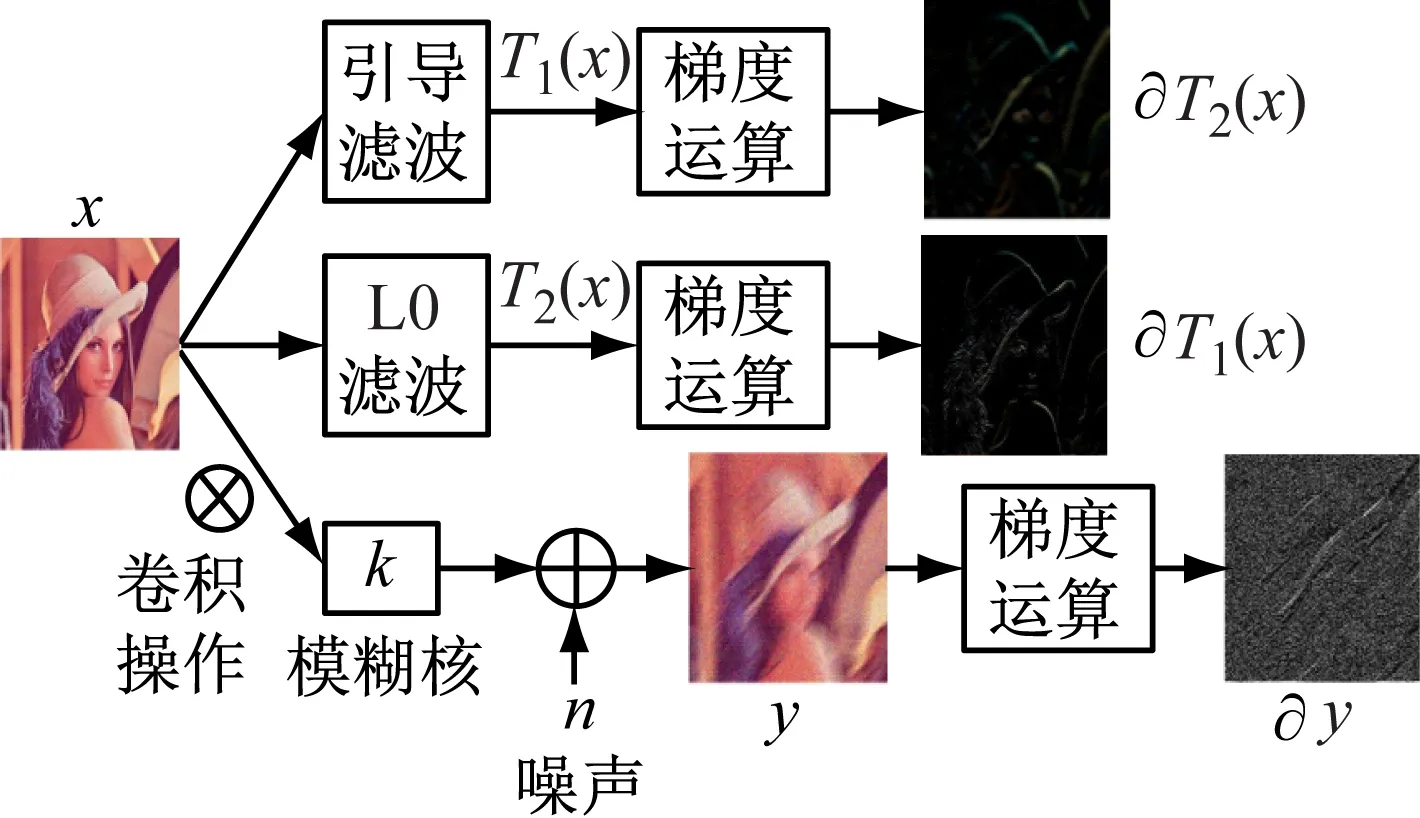
圖2 圖像預處理部分的結構流程
在利用濾波實現圖像去模糊的基礎上,提出利用引導濾波對圖像進行預處理,因為通過引導濾波可抑制圖像中的無關細節,并且保留圖像的主要結構,如圖3所示。其中,圖3(a)是清晰圖像;圖3(b)是運動模糊噪聲圖像;圖3(c)是清晰圖像經過引導濾波后的圖像;圖3(d)是與清晰圖像像對應的梯度域圖像;圖3(e)是模糊圖梯度域圖像;圖3(f)是清晰圖像經過引導濾波后的梯度域圖像。
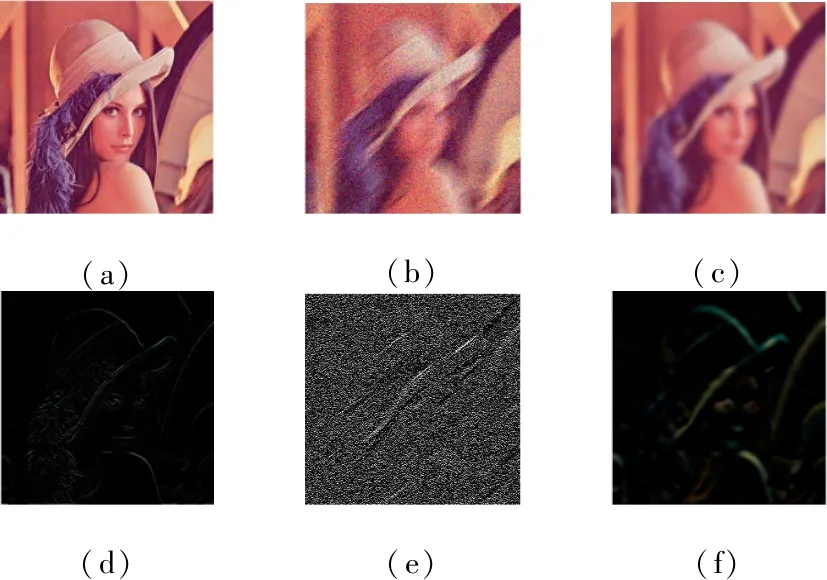
(a)(b)(c)(d)(e)(f)
圖3 引導濾波處理結果圖
2.2 卷積神經網絡結構設計
文獻[17]中提出利用梯度域圖像訓練CNN結構,而本文對文獻[17]中的網絡結構進行改進,提出利用較大卷積核提取圖像的細節信息;加深網絡層數使網絡訓練得到的權重數據更加準確。
現利用梯度域對網絡進行訓練。網絡的輸入分別經過引導濾波和L0濾波后的梯度域圖像與其對應的模糊圖像,輸出為圖像的邊緣信息。把輸入圖片旋轉90°后提取其邊緣信息,與不旋轉時提取邊緣信息得到的效果相同,因此本方法僅利用垂直方向的梯度對網絡進行訓練,并在水平和垂直方向上共享權重,如圖4所示。
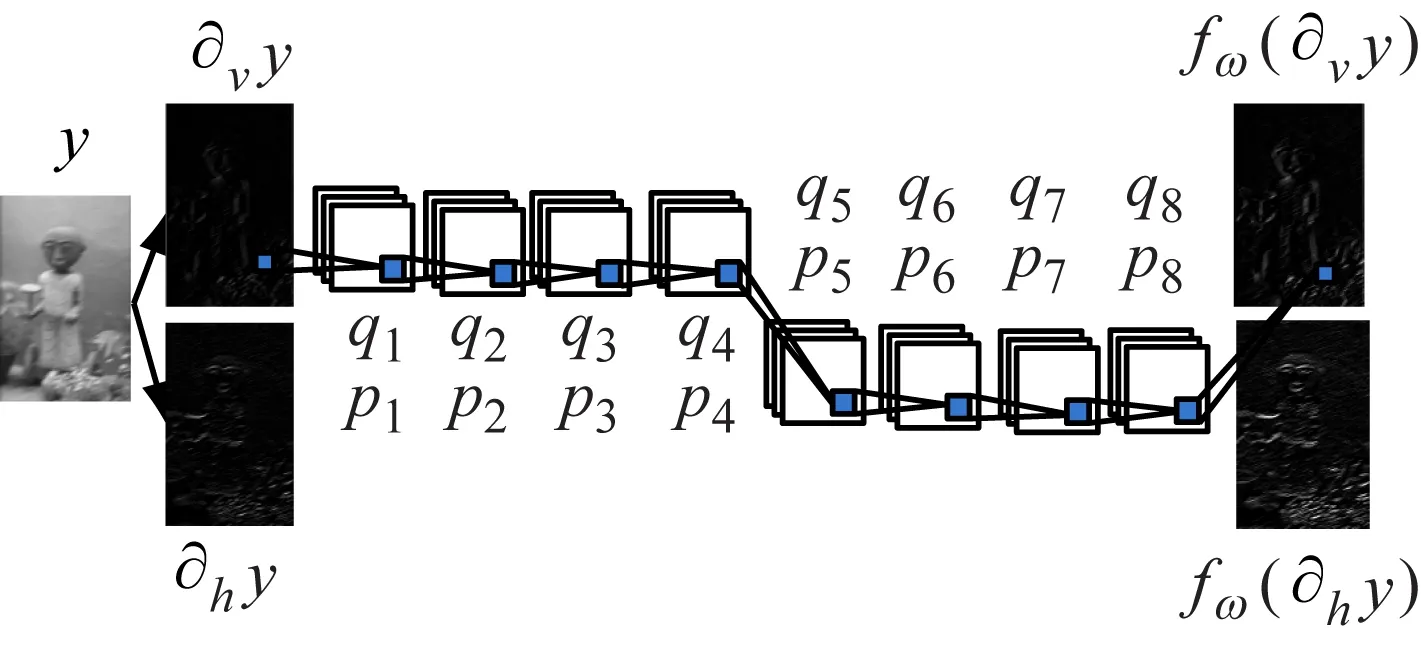
圖4 網絡結構
由圖4可得:
f0(?y)=?y
(2)
(3)
l=1,2,…,7

(4)

(5)
式中,{αm}是可學習的系數。
通過一組圖像對D{?yi,?T1(xi)},網絡的第1階段可以描述為問題:
(6)
式中:D表示真實圖像和模糊圖像的訓練對;采用基于L1損失的TV正則化方法對圖像梯度進行稀疏化處理;λ是正則化的權重。由于L1范數在0處不可微,因此利用Charbonnier函數,即ρ(z)=(z2+ε2)1/2來估計它。目標函數可寫為

(7)
為了訓練第2階段的網絡,最后3層的輸出為:
(8)

(9)

(10)
式中,gn是尺寸為q6×q6可學習的卷積核。
通過一組圖像對D{?yi,?T2(xi)},網絡的第2階段可以描述為問題:
(11)
兩個子網絡訓練完后,將這兩個子網絡結合為
(12)
式中,m=1,2,…,p5;n=1,2,…,p6。
整個網絡訓練過程loss值為
(13)
式中:ρ(z)=(z2+ε2)1/2,ε取10-6;λ為正則項的權重;fω(?yi)是網絡訓練得到的邊緣信息。
2.3 圖像去模糊
2.3.1 模糊核的估計

(14)
式中:參數η控制k的平滑度。第1項提供可靠邊緣信息,第2項約束模糊核稀疏性,第3項
C(k)={(x,y)||?xk(x,y)|+|?yk(x,y)|≠0}
它的作用是使模糊核稀疏,也阻止出現不連續點,從而提高模糊核的連續性。
由于式(14)涉及到離散數值計算,因此很難直接對它求解最小值,本文將式(14)描述為:
(15)
(16)
式(15)可以利用IRLS方法[19]求得,實驗中,一共進行了3次迭代;式(16)可以通過交替優化[20]的方法求得解,一共進行了3次迭代。通過對上面兩個子式的求解,最終可以得到模糊核k。
2.3.2 最終的潛像估計
得到模糊核后,最終潛像可通過非盲解卷積的方法獲得。本文主要恢復運動模糊圖像的邊緣,采用TV正則化進行最終潛像的恢復,即
(17)
3 實驗結果及分析
3.1 運動模糊圖像生成
采用的圖像數據庫是BSDS500中的自然圖像,為了獲得模糊圖像yi,對每一張清晰圖像xi進行模糊處理。假設運動模糊是全局線性模糊,模糊核k=(l,o)受到長度和角度的影響。選取運動模糊的長度l從1~25,以2為間隔,角度o從0°~150°,以30°為間隔。由于當模糊核長度l=1時,不管運動方向是什么,所有的運動向量都對應著相同的模糊核,因此生成73個不同的模糊核。將這73個不同的模糊核與BSDS500中的500張自然圖像xi進行隨機卷積,再加上1%的高斯白噪聲,就可以產生運動模糊圖像。將產生的運動模糊圖像裁剪成大小為45×45的模糊圖像塊,獲得最終所需的模糊圖像yi。本文通過給定模糊的圖像yi,根據提出的方法首先計算垂直和水平方向的圖像梯度,以梯度域圖像作為卷積神經網絡的輸入。
3.2 網絡結構
為了找到對圖4所示結構作貢獻的參數,進行了兩組實驗。兩組實驗中,CNN層數相同,每層濾波器數量不同,濾波器的大小不同。通過比較兩組實驗使用同一數據集在訓練期間的loss值,來分析不同參數對實驗結果的影響,如圖5和圖6所示。
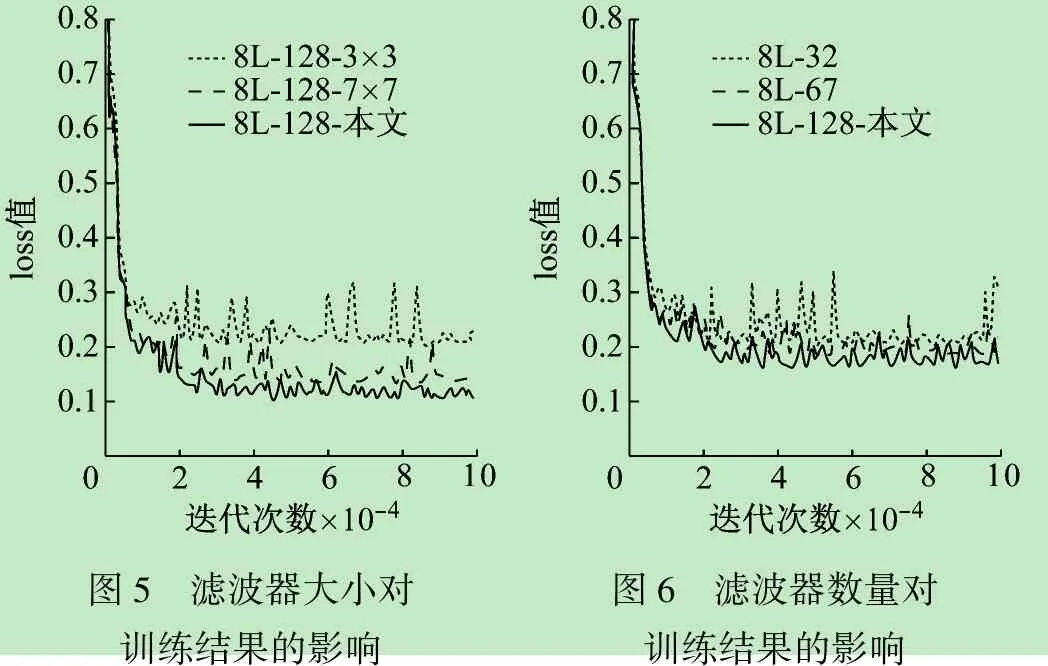
圖5 濾波器大小對訓練結果的影響圖6 濾波器數量對訓練結果的影響
訓練整個模型一共進行10萬次迭代,圖5表示濾波器大小對訓練結果的影響。整個網絡一共8層,每層濾波器的個數均為128個。圖中:紫色曲線是在大小不同的濾波器下獲得的;藍色曲線是在整個網絡均使用5×5的濾波器下獲得的;紅色曲線是在整個網絡均使用7×7的濾波器理獲得的。圖6表明,3種loss曲線約在85 000次時開始收斂,但本文方法采用不同大小濾波器時的loss值皆都低于其他兩種情況。這表明,本文所選擇的濾波器大小是合理的。
圖6表示濾波器的數量對訓練結果的影響。本實驗的網絡一共有8層,每層濾波器的大小均如圖4所示,分別選取每層濾波器數量為64個和32個,與本文每層濾波器數量為128個進行對比。圖中:紫色曲線是本文采用每層128個濾波器時獲得的;藍色曲線為網絡每層使用64個濾波器時獲得的,紅色曲線為網絡每層使用32個濾波器時獲得的。圖5表明,3種loss曲線大約在60 000次時開始收斂,但本文采用每層濾波器數量為128時的loss值均低于其他濾波器數量所對應的值。這表明,本文所選擇的濾波器的數量是合理的。
3.3 去模糊效果
采用峰值信噪比(Peak Signal to Noise Ratio,PSNR)對去模糊的效果進行分析:
(18)
式中,T指圖像像素強度的最大值。
去模糊效果分別與多層神經網絡(Multi-layer Perceptron,MLP)方法[10]和邊緣檢測方法[21]進行對比。MLP方法利用多層感知器實現圖像去模糊;邊緣檢測方法將圖像結構與優化算法相結合應用于圖像去模糊,如圖7所示。
圖7 去運動模糊效果
圖7選取4張圖像在不同模糊程度下,分別運用MLP方法、邊緣檢測方法及本文方法對圖像進行去運動模糊。其中:圖7(a)為原始清晰圖像;圖7(b)為模糊噪聲圖像;圖7(c)為使用MLP方法去除運動模糊后的結果圖,圖7(d)為使用邊緣檢測方法去除運動模糊后的結果圖,圖7(e)為使用本文提出的算法去除運動模糊后的結果圖。PSNR值如表1所示。由表1知,MLP方法與邊緣檢測方法去除運動模糊的PSNR值相差不大,但是MLP方法會放大噪聲,邊緣檢測方法可能會給圖像帶來振鈴效應。而本文方法的PSNR值在對比實驗中值均明顯高于其他兩種方法,而且放大噪聲與振鈴效應均不明顯,去運動模糊效果明顯優于其他兩種方法,這就表明本文算法能夠有效地移除圖像運動模糊。
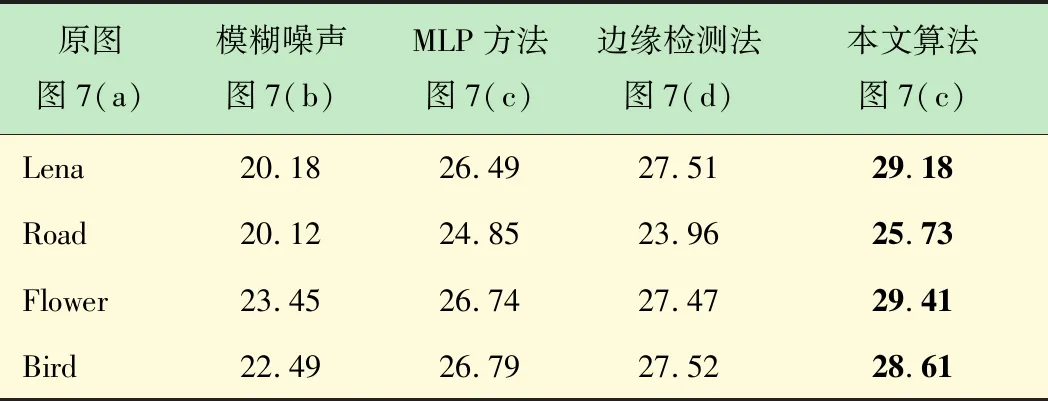
表1 不同方法的PSNR值 dB
4 結 語
本文提出一種基于梯度域和深度學習的圖像運動模糊盲去除算法,將CNN可以學習圖像自身特征的性能用于去模糊的問題中,設計了一個有效的CNN結構;將圖像梯度域預處理與CNN網絡相結合的方法,避免直接用CNN網絡而忽略圖像先驗信息的缺點。實驗表明,本文方法不僅能有效去除圖像運動模糊,同時很好地保留了圖像細節,放大噪聲不明顯,較好地抑制了振鈴效應的產生。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
