工業(yè)機器人電力載波群控通信的設計
2019-07-01 03:40:34楊帥王子辰魯紹函
科技創(chuàng)新與應用 2019年18期
楊帥 王子辰 魯紹函
摘 ?要:針對企業(yè)自動化改造過程中利用工業(yè)機器人與企業(yè)原有設備互聯(lián)互通需要重新布線的問題,設計了一種工業(yè)機器人電力載波群控通信方案。該方案采用PL3120雙頻電力載波技術,利用雙頻二進制相移鍵控調(diào)制手段,實現(xiàn)了工業(yè)機器人與外圍設備之間的相互通信與控制。工業(yè)機器人采用IO通信模式,利用電平轉(zhuǎn)換實現(xiàn)與電力載波節(jié)點控制器匹配通信。本設計為電力載波技術在工廠車間這種諧波噪音干擾嚴重環(huán)境下的應用推廣提供有效解決方案,具有重要的應用價值。
關鍵詞:工業(yè)機器人;電力載波;群控通信
中圖分類號:TP273 文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2019)18-0019-03
Abstract: In order to solve the problem that the interconnection between the industrial robot and the original equipment of the enterprise needs to be rewired in the process of enterprise automation transformation, a power carrier group control communication scheme of industrial robot is designed. The scheme adopts PL3120 dual-frequency power carrier technology and dual-frequency binary phase shift keying modulation to realize the communication and control between industrial robot and peripheral equipment. The industrial robot adopts the IO communication mode and uses the level conversion to realize the matching communication with the power carrier node controller. This design provides an effective solution for the application and popularization of power carrier technology in the environment of serious harmonic noise interference in factory workshop, and has important application value.
Keywords: industrial robot; power carrier; group control communication
1 概述
工業(yè)機器人作為高端自動化載體,必須與外界進行集成交互,實現(xiàn)群控通信,這樣才能發(fā)揮出其強大的協(xié)調(diào)作業(yè)功能,獨立的機器人本體應用價值不高。工業(yè)機器人的群控通信主要包括與其它機器人的多機協(xié)作、與外圍控制器進行信息交換、采集傳感器信號、驅(qū)動執(zhí)行器等方面,主要依靠RS232、Profibus、EtherNet、標準IO等通信方式,這些全部需要配備專用的通訊電纜。目前國內(nèi)很多企業(yè)引進工業(yè)機器人出于自動化升級目的[1],都是在原有的車間和設備基礎上進行改造,但是此類企業(yè)往往車間和設備布局已經(jīng)定型,實現(xiàn)工業(yè)機器人與企業(yè)原有設備互聯(lián)互通利用常規(guī)的通信媒介需要毀壞原有的基建工程才能鋪設線纜,工程施工量大,既費時又費力,改造停工時間長,企業(yè)改造難度和成本顯著增加。為了解決這一企業(yè)難題,提出了利用電力載波技術實現(xiàn)工業(yè)機器人與周邊設備相互通信。
2 工業(yè)機器人通信接口
工業(yè)機器人提供豐富的IO通信接口方式與周邊的外圍設備進行集成交互,工業(yè)機器人的通信方式直接決定工業(yè)機器人能否集成到系統(tǒng)中以及能否支持復雜控制。以ABB工業(yè)機器人為例,機器人支持的通信方式有IO通信、總線通信、網(wǎng)絡通信等。IO通信是工業(yè)機器人最常見的通信模式,最常見的有8路IO,或者16路IO以及模擬量0V和24V。在較復雜的IO應用中使用cross-function實現(xiàn)數(shù)個IO信號邏輯關系的綁定,也可將數(shù)個單獨的IO信號合并為組用于傳輸較為復雜的信號[2]。當工業(yè)機器人與外設之間傳遞的信息數(shù)量和復雜度很大時,最優(yōu)的選擇是總線通信和網(wǎng)絡通信,采用何種總線取決于系統(tǒng)中除機器人系統(tǒng)之外的設備能夠支持的通信方式。如果PLC支持profinet總線,則PLC和機器人之間的系統(tǒng)交互易采用profinet總線。工業(yè)機器人網(wǎng)絡通信包括Socket、PC SDK、RMQ、RWS等,Socket是基于TCP/IP的通信方式,能夠以字符串的形式發(fā)送各種數(shù)據(jù)。PC SDK提供工業(yè)機器人的遠程通信和控制的接口。RMQ用于機器人不同任務之間的通信,分為中斷模式和同步模式。中斷模式下工業(yè)機器人響應中斷后實時對信息進行處理。同步模式下工業(yè)機器人只在執(zhí)行讀取指令時才對信息進行處理。RWS基于HTTP實現(xiàn)跨平臺應用,通過IE讀取機器人的信息。
3 雙頻電力載波技術
電力線載波通信是以電力網(wǎng)作為通信信道的一種有線通信方式,具有可變信號衰減、阻抗調(diào)制、脈沖噪聲、等幅震蕩波干擾等不利于數(shù)據(jù)傳輸?shù)奶匦浴;赑L3120雙頻電力載波技術是目前一個非常完善的電力通信傳輸方案,采用雙頻BPSK(二進制相移鍵控調(diào)制)手段,根據(jù)電力線的噪聲動態(tài)調(diào)整靈敏度,自動消除脈沖噪聲,能夠自適應畸變糾正,校正失真信號。根據(jù)電網(wǎng)環(huán)境自動啟用電力載波雙載頻工作方式,當?shù)谝惠d波頻率由于噪聲而阻塞時,會自動切換到第二載波頻率,雙頻帶寬要避免由于諧波而導致兩個頻率同時被阻塞的發(fā)生,即使在嚴重噪聲干擾的情況下載波數(shù)據(jù)仍可靠傳輸[3-4]。通過自學習報文路由算法實現(xiàn)電力載波節(jié)點中繼角色,實現(xiàn)無需額外增加中繼設備就能自動中繼,延長和擴大電力載波傳輸?shù)木嚯x和范圍。該技術利用三個能夠相互溝通的微處理器分別處理電力載波通信過程中介質(zhì)訪問、網(wǎng)絡通信和應用處理任務,基于OSI模型的標準化LonTalk通信協(xié)議憑借專有的雙頻載波手段有效提高電力載波通信的質(zhì)量,同時結(jié)合豐富的接口電路和智能路由算法有效降低電力載波設備開發(fā)難度,節(jié)約設備的開發(fā)成本。
4 工業(yè)機器人電力載波群控通信設計
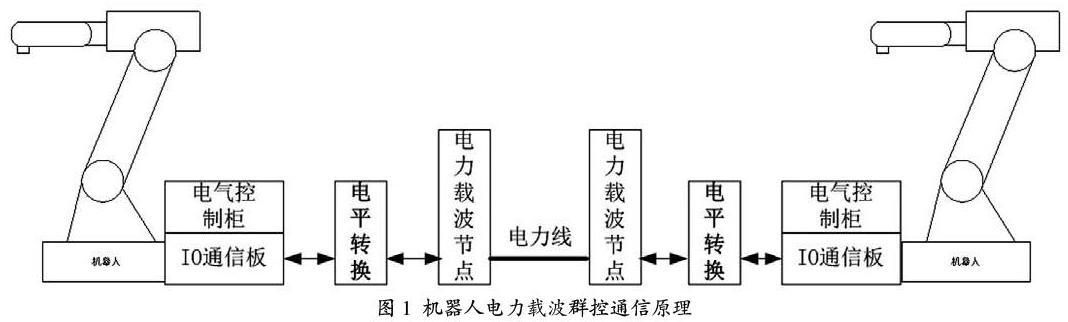
利用常用的IO通信模式實現(xiàn)工業(yè)機器人電力載波群控通信原理圖如圖1所示,工業(yè)機器人利用基于PL3120雙頻電力載波技術的節(jié)點控制器實現(xiàn)工業(yè)機器人互聯(lián)互通。電力載波節(jié)點控制器將一個Neuron處理器核心和一個電力線收發(fā)器集成在一起,控制器中以PL3120為核心的中央處理單元結(jié)構(gòu)原理框圖如圖2所示,11個通用I/O端口可以被配置成I2C、Neurowire、紅外線、磁卡、邊沿記錄等34種輸入/輸出對象,使之能夠適用于多種應用場合。PL3120內(nèi)部的A/D轉(zhuǎn)換器對電力線上的載波信號進行模數(shù)轉(zhuǎn)換,以數(shù)字信號處理器DSP為核心,一是對A/D轉(zhuǎn)換器處理后的數(shù)字信號進行算法處理,二是將經(jīng)過算法處理的數(shù)字信號通過D/A轉(zhuǎn)換器進行數(shù)模轉(zhuǎn)換,通過放大電路進行功率放大后送到耦合電路上進行電力載波傳輸。
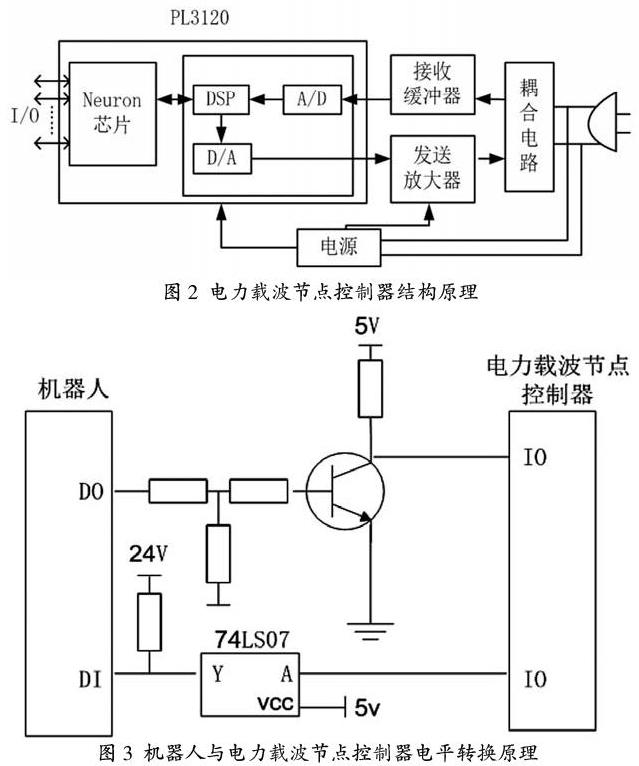
電力載波節(jié)點控制器IO管腳出信號電平是CMOS 電平,而ABB工業(yè)機器人IO管腳的工作電壓是24V,因此工業(yè)機器人IO管腳與電力載波節(jié)點控制器IO管腳之間需要電平轉(zhuǎn)換,可以采用74LS07或三極管等器件實現(xiàn),原理如圖3所示。
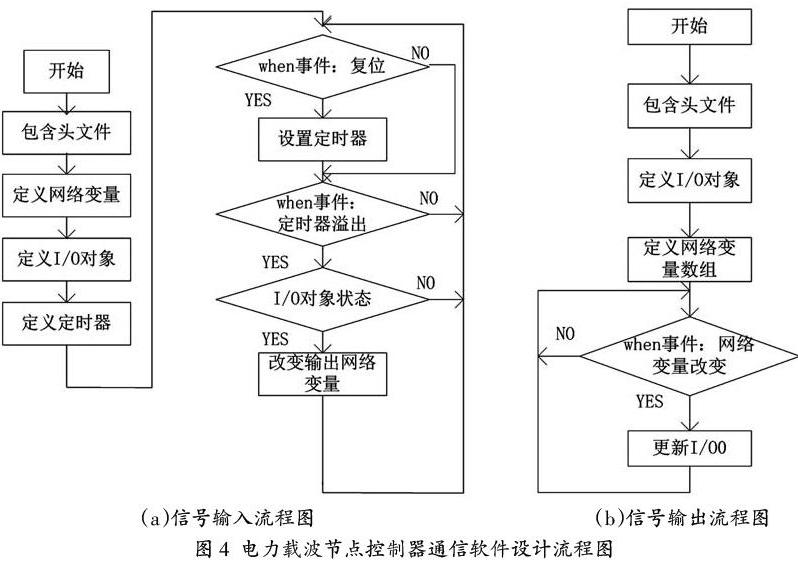
ABB機器人的標準IO板接口使用直流電壓電流,其輸入的公共端是0V,輸出的公共端是24V,因此要輸入輸出接線都形成一個回路,實現(xiàn)工業(yè)機器人電力載波群控通信首先要對機器人IO信號板進行參數(shù)配置:首先配置IO信號板模塊單元,設定模塊單元的名稱、類型、總線和地址,其次配置IO信號,設定信號名稱、類型、占用的模塊單元和地址,建立對應IO信號之后,重啟信號生效。電力載波節(jié)點控制器軟件編寫采用Neuron C,它在標準C的基礎上進行了自然擴展,直接支持PL3120的固化軟件,并刪除了標準C中一些不需要的功能,如某些標準的C函數(shù)庫,并為載波通信環(huán)境提供了特定的對象集合及訪問這些對象的內(nèi)部函數(shù),它提供了內(nèi)部類型的檢查,是一個開發(fā)載波通信應用的強有力的工具。節(jié)點的應用程序包括調(diào)度程序、定時器、I/O對象和網(wǎng)絡變量。調(diào)度程序負責芯片的任務調(diào)度,而定時器用來干涉任務的調(diào)度,I/O對象實現(xiàn)神經(jīng)芯片和外設之間的數(shù)據(jù)傳送[5]。程序運行采用事件觸發(fā)方式,當給定的一個條件為真時,與該條件相關聯(lián)的一段程序代碼將被執(zhí)行,程序中的事件通常是I/O對象的改變、網(wǎng)絡變量的改變、定時器的終止等。
5 結(jié)束語
本設計為電力載波技術在工廠車間這種諧波噪音干擾嚴重環(huán)境下的應用推廣提供有效解決方案,降低了企業(yè)車間利用工業(yè)機器人實施自動化改造的工程施工量,簡化了改造方案,節(jié)省了成本,有效提升企業(yè)通過工業(yè)機器人升級自動化的積極性,促進了工業(yè)機器人在中小型企業(yè)的應用。
參考文獻:
[1]楊帥,孫炳孝,薛嵐,等.勞動力成本上升視閾下工業(yè)機器人對勞動密集型企業(yè)發(fā)展的影響[J].科技經(jīng)濟導刊,2018,26(30):13-14.
[2]楊帥.一種新型油氣懸掛系統(tǒng)關鍵工裝的設計[J].機床與液壓,2018,46(20):40-43.
[3]楊帥,薛嵐.船舶電力線載波通信傳輸信號去噪方案設計研究[J].艦船科學技術,2019,41(2):172-174.
[4]薛嵐,楊帥,孫炳孝.配電網(wǎng)電力載波通信關鍵技術的研究[J].科技創(chuàng)新與應用,2018(11):140-141.
[5]楊帥,張現(xiàn)征,王興龍,等.機器人信號傳輸方法的研究[J].科技創(chuàng)新與應用,2019(2):166-167.