探究加速度與力質量的關系
2019-06-29 07:33:38趙廷富
物理通報 2019年7期
趙廷富
(武漢市第三中學 湖北 武漢 430050)
1 使用教材
人民教育出版社出版的高中《物理·必修1》第四章第2節.
2 實驗器材
固定有力傳感器的數碼小車,一端帶有滑輪的木板,鉤碼,細線,DISLab“加速度和力的關系”專用軟件.
3 實驗改進要點
教材中的實驗采用了將鉤碼的重力大小mg視為細繩的拉力F.這種近似處理只有在一定條件下才成立.設小車的質量為M,鉤碼的質量為m,理論上有
mg=(M+m)a
小車與鉤碼共同的加速度大小
而小車受到的合外力
只有當M?m時,才有F≈mg.
改進一:用力傳感器直接測量細繩上的拉力.
本實驗通過力傳感器,直接測量細繩上的拉力,不需要再做近似處理.將力傳感器固定在小車上,拉小車的細繩直接拴在力傳感器上,在小車運動的過程中,計算機上給出力F隨時間t變化的圖像.
改進二:在研究“當小車質量不變時a與F的關系”實驗的基礎上,對已有數據進行了再利用,從而獲得加速度與質量關系的多組數據.
從前面的推導中不難看出,小車質量的改變帶來了新的問題,即使鉤碼質量不變,細繩上的拉力也會發生改變,無法精確地控制每次實驗的合外力不變.
具體方案是:在改進一實驗中,分發給每個小組的小車質量各不相同,收集5組學生的a-F數據,將其匯總至同一a-F坐標系中,得到5條斜率不同的直線.在圖中作一根平行于a軸的直線,與每個圖線都有一個交點,就得到了同一合外力下多組a-M數據,由此可以研究當拉力相同時,a和M的定量關系.
4 實驗原理/實驗設計思路
(1)控制變量法:先保持小車的質量不變,通過改變鉤碼的個數來改變小車所受的拉力F,測出相應的加速度a;再保持拉力不變,改變小車的質量M,測出相應的加速度.
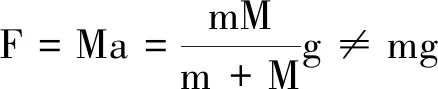
(2)研究a-F關系時,實驗裝置如圖1所示.
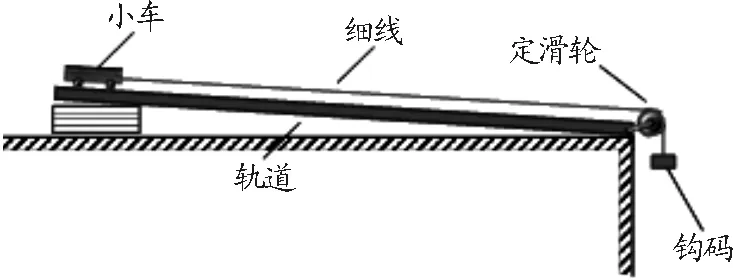
圖1 研究a-F關系實驗裝置示意圖
將木板軌道墊高,讓小車重力沿斜面方向的分力恰好平衡小車所受摩擦力,此時繩子拉力即小車所受合外力.小車在繩子拉力F作用下運動時,力傳感器測量小車所受合外力,數碼小車測量小車運動的位移,通過無線傳輸信號的方式,計算機上可同時獲得v-t圖像和F-t圖像,界面如圖2所示.選擇合適的區域,即可得到相應的a-F數據.
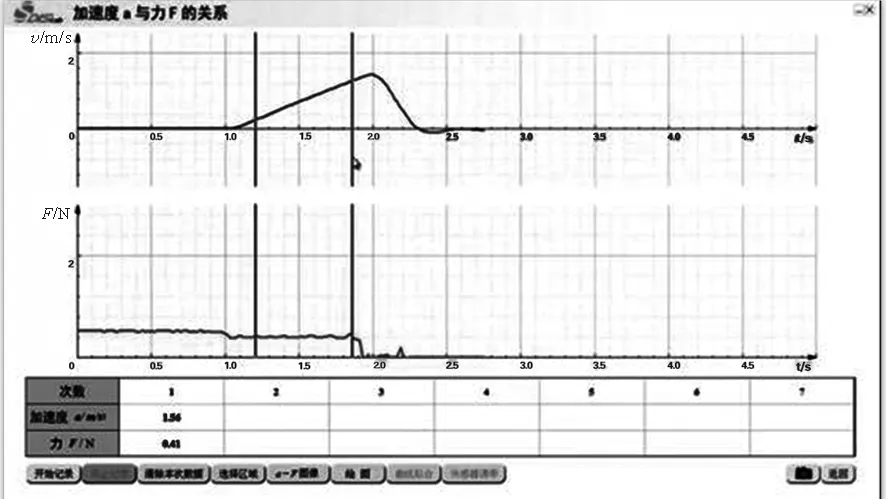
圖2 在計算機上獲得的v-t和F-t圖像
(3)研究a-M關系時,由于無法嚴格地控制拉力不變,因此選擇5組不同質量的情況下a與F的關系數據.在改進一中分發給每個小組的小車質量均不相同,改進二可以采用將第一組實驗中5個小組的實驗數據進行匯總,在同一張a-F坐標系中將5個不同質量小車的a與F的圖像繪制出來.然后在圖上作一根平行于縱軸的直線,與5個圖線各有一個交點,讀出每個交點的縱坐標,即可獲得5組相同拉力作用下a與M的數據.
5 實驗教學目標
(1)知識與技能
理解加速度與合外力、質量間的定量關系;理解牛頓第二定律的表達式.
(2)過程與方法
在提出猜想、設計實驗、搜集證據、分析數據、獲得結論的過程中,經歷科學探究的一般過程,感悟化曲為直的物理思想方法.
(3)情感態度與價值觀
通過實驗科學探究過程,養成對待實驗嚴謹、客觀的科學態度.
6 實驗教學內容
在課堂教學中,將學生分為5個小組,以小組為單位進行實驗研究.
(1)控制小車質量M不變,研究a與F的定量關系
1)操作實驗:每個實驗小組擁有一輛小車,在實驗中保持小車質量M不變.
2)收集數據:重復步驟1),做5次實驗,獲得5組a,F數據,記錄在表1中.
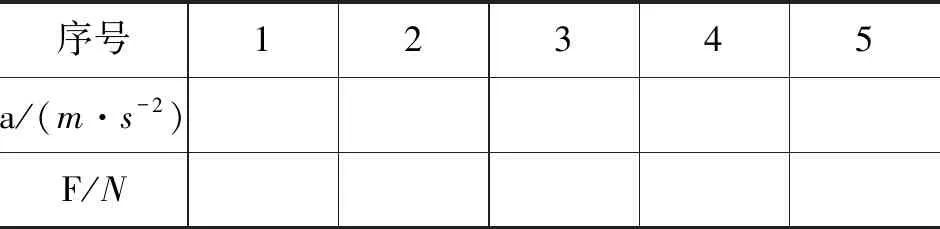
表1 a和F數據記錄表
3)處理數據:根據上述數據,在如圖3所示的a-F坐標系中描點作圖.
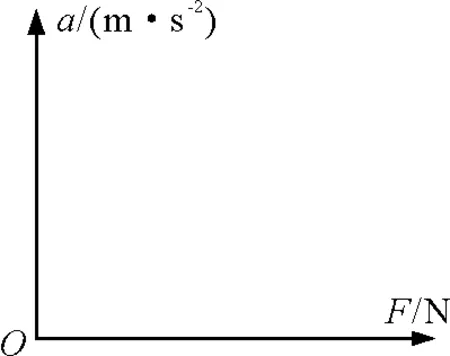
圖3 a-F坐標系
盡管計算機軟件界面上可以直接繪制a-F關系圖像,但本實驗還是請學生將實驗數據記錄在表格中,學生親自在坐標紙上描點連線,目的是讓學生學會作圖的方法.教師這樣要求學生,就是培養學生良好的習慣,對學生的未來大有益處.
4)得出結論:根據獲得的圖像得出物體a與F的定量關系,即a∝F.
(2)控制細繩拉力不變,研究a與M之間的定量關系
為了控制合外力不變,學生提出的實驗方案為:保持鉤碼數量不變,僅改變小車的質量.測得的拉力數據如圖4所示.
在上述控制小車質量不變研究a與F的定量關系的實驗中,5個小組所用的小車質量各不相同,分別為M1,M2,M3,M4,M5.測得ai和Fi(i=1,2,3,4,5)的值,將5個小組的實驗數據進行匯總,如表2所示.
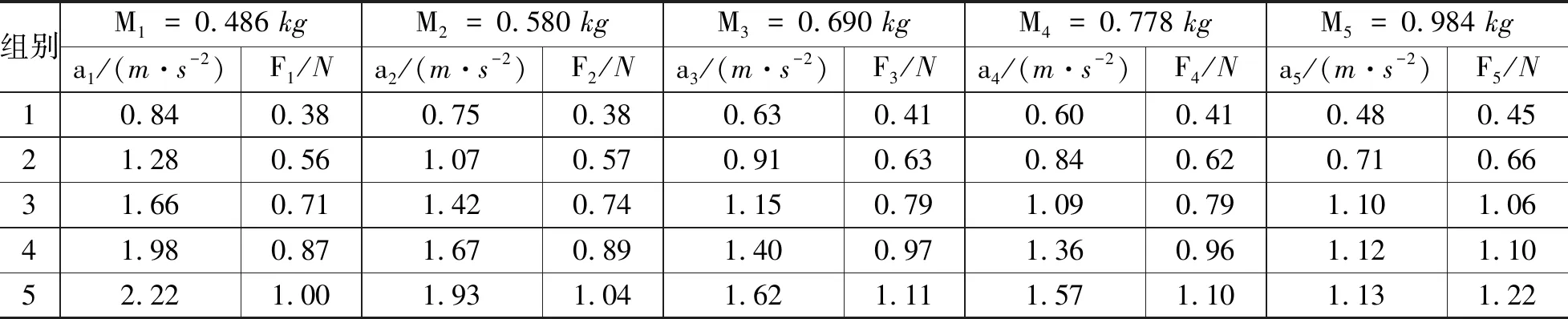
表2 5個不同的小車對應的實驗數據
在同一張a-F坐標系中將5個不同質量小車的a與F圖像繪制出來,如圖5所示.
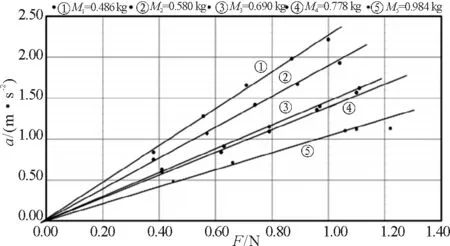
圖5 5個不同的小車對應的a-F圖像
請每個小組的學生自行在圖5上作一根平行于縱軸的直線,與5個圖線各有一個交點,讀出每個交點的縱坐標,即可獲得5組相同拉力作用下a與M的數據,填入表格3(表3中加速度的數據是取F=1.0 N讀出的).
表35組相同拉力作用下的a與M數據
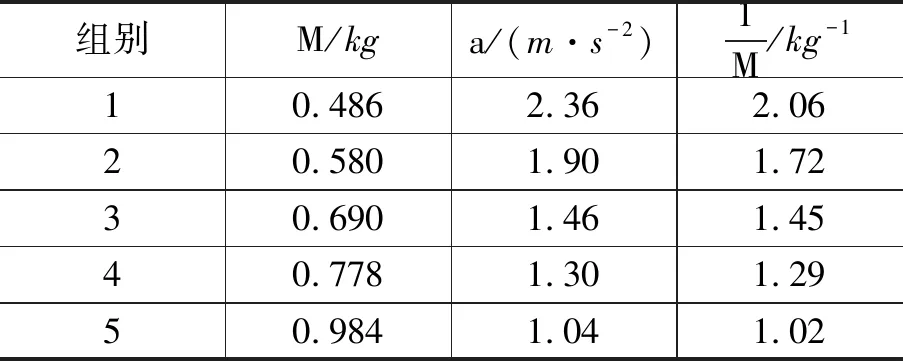
組別M/kga/(m·s-2)1M/kg-110.4862.362.0620.5801.901.7230.6901.461.4540.7781.301.2950.9841.041.02
1)處理數據

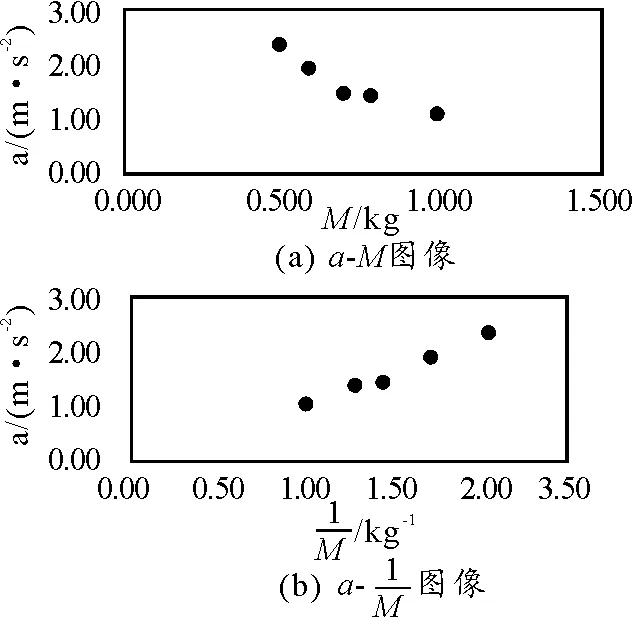
圖6 用Excel作圖
2)得出關系
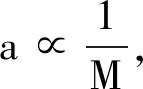
7 實驗教學過程
教學流程圖如圖7所示.
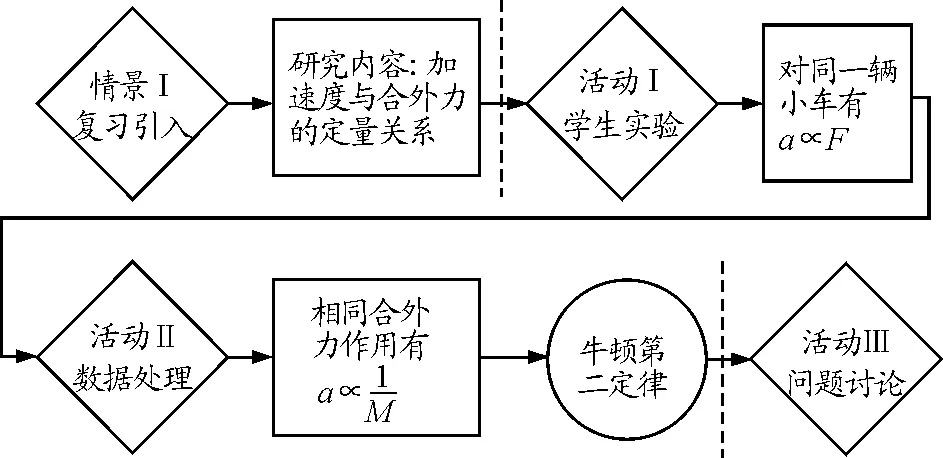
圖7 教學過程流程圖
8 實驗效果評價
(1)成功之處
1)用力傳感器直接測量小車受到的細繩拉力F,避免了將鉤碼重力G視為細繩拉力帶來的系統誤差.
2)位移傳感器和力傳感器的數據同步進入計算機,獲得了同一段時間的v-t圖像和F-t圖像,選擇合適的區域,即可得到相應的a-F數據.
3)整合5組實驗數據并在此基礎上搜集新數據的方法,解決了難以控制細繩拉力不變的問題.
(2)存在的問題
由于細繩存在著彈性,小車運動過程中力傳感器測得的細繩拉力有波動,目前采用的處理方法是取一段時間的平均值,若區域選擇的不恰當,力的測量就會產生較大的誤差.所以期待在技術上或實驗方法上能有更好的處理方法.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
汽車觀察(2016年3期)2016-02-28 13:16:26
