輪式移動機(jī)器人文獻(xiàn)綜述
2019-06-26 01:31:54王曉蕓
關(guān)鍵詞:移動機(jī)器人
王曉蕓 崔 培 陳 曉
(石家莊鐵路職業(yè)技術(shù)學(xué)院 河北石家莊 050041))
1 引言
隨著社會發(fā)展和科技進(jìn)步,機(jī)器人在當(dāng)前的工業(yè)生產(chǎn)和人們生活中的應(yīng)用越來越多。輪式移動機(jī)器人由于其具有自重輕、承載大、機(jī)構(gòu)簡單、驅(qū)動和控制相對方便、行走速度快、機(jī)動靈活、工作效率高等優(yōu)點(diǎn),而被廣泛應(yīng)用于生產(chǎn)生活中的各個(gè)領(lǐng)域。輪式移動機(jī)器人不同的車輪數(shù)目一般采用不同的控制方式,因此,輪式移動機(jī)器人按照車輪數(shù)目可分為單輪滾動機(jī)器人、雙輪移動機(jī)器人、四輪移動機(jī)器人、多輪(復(fù)六輪和八輪)移動機(jī)器人。對這些機(jī)器人的研究現(xiàn)狀進(jìn)行了分析,并對輪式移動機(jī)器人的性能、運(yùn)動學(xué)分析方法、動力學(xué)建模方法進(jìn)行了比較和總結(jié)。

表1 獨(dú)輪機(jī)器人研究現(xiàn)狀

續(xù)表1
2 輪式移動機(jī)器人研究現(xiàn)狀
獨(dú)輪車機(jī)器人一個(gè)多變量、 強(qiáng)耦合、 非線性的復(fù)雜動力學(xué)系統(tǒng),其產(chǎn)生穩(wěn)定運(yùn)動所需解決的動態(tài)平衡問題,是一個(gè)很好的控制理論和動力學(xué)研究模型。雙輪自平衡機(jī)器人需要在沒有外力作用下能夠僅靠自身從倒地狀態(tài)恢復(fù)到豎直平衡狀態(tài),即雙輪機(jī)器人自平衡。多輪移動機(jī)器人獨(dú)立驅(qū)動輪式移動機(jī)器人每只車輪都是單獨(dú)的動力源并且相互獨(dú)立,對車輪的輸出轉(zhuǎn)矩直接控制,具有很強(qiáng)的受控性。表1、表2、表3分別是是獨(dú)輪滾動機(jī)器人、雙輪自平衡機(jī)器人及多輪機(jī)器人的研究現(xiàn)狀。
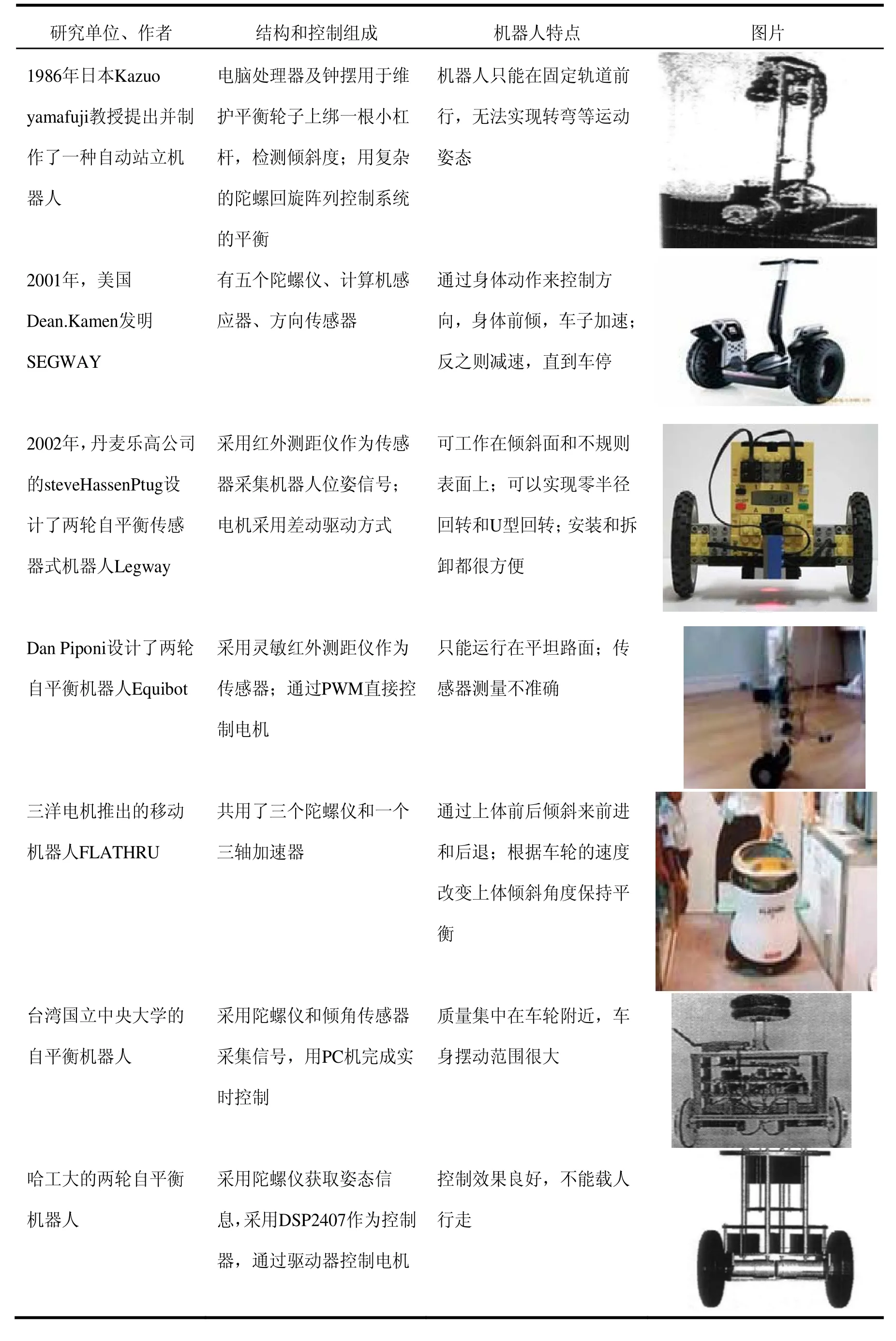
表2 雙輪機(jī)器人研究現(xiàn)狀
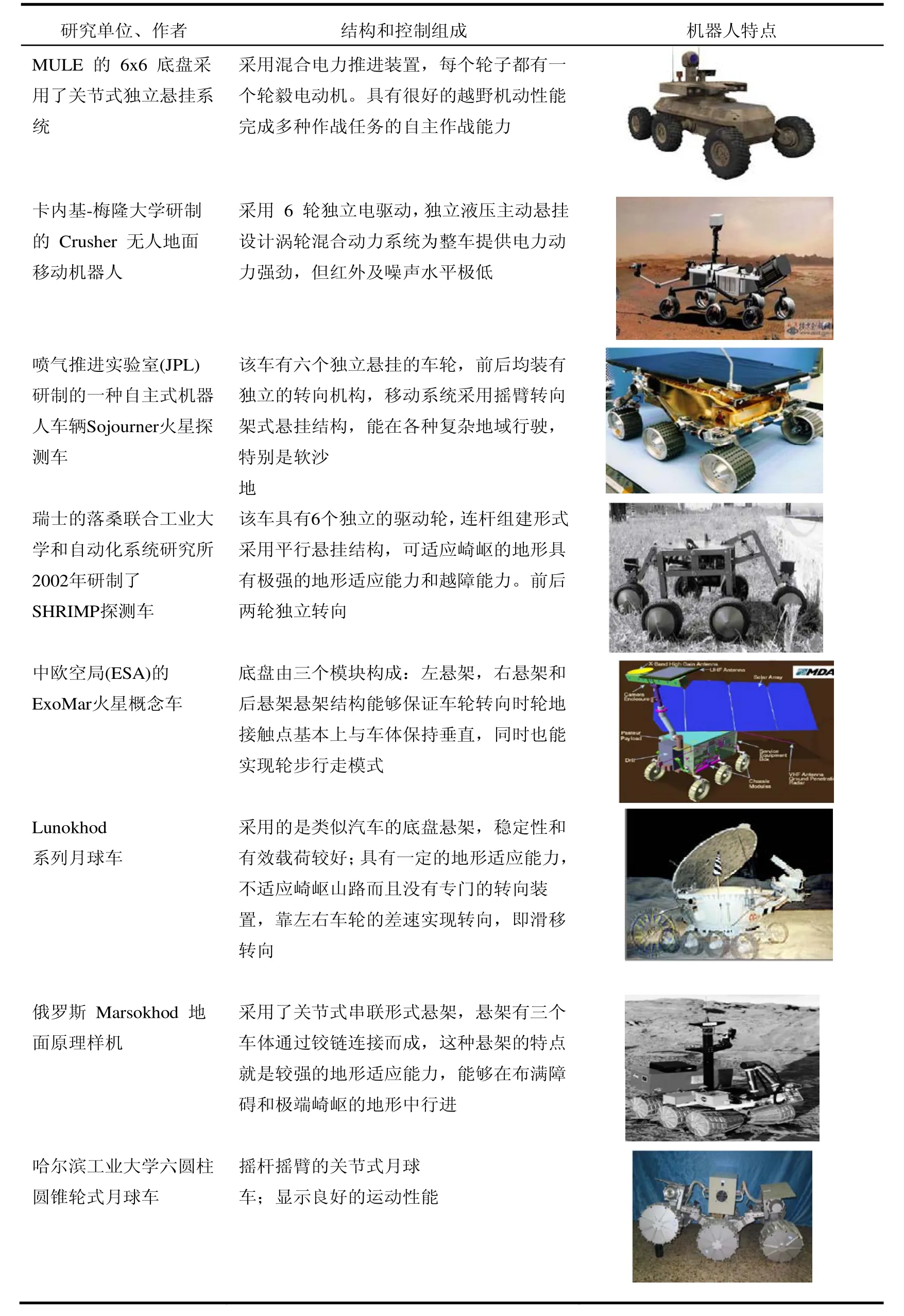
表3 多輪機(jī)器人研究現(xiàn)狀
3 輪式移動機(jī)器人的運(yùn)動學(xué)和動力學(xué)特性分析方法
輪式機(jī)器人的運(yùn)動學(xué)分析方法主要有矢量法(速度合成法)、坐標(biāo)變換法(D-H)、幾何法和輪心建模法等。矢量法是通過描述多剛體運(yùn)動時(shí)不同位置以及不同剛體間的速度來建立動力學(xué)方程式,其矢量方程易列出,物理意義明確,但求解繁瑣,多用于平面移動機(jī)器人的建模或者并聯(lián)機(jī)構(gòu)建模。坐標(biāo)變換法是對車體建立關(guān)節(jié)坐標(biāo)系,利用D-H法進(jìn)行坐標(biāo)變換,再對關(guān)系式求導(dǎo),得出輪子相對車體的速度雅可比方程式,該方法較為繁瑣,需進(jìn)行偏導(dǎo)運(yùn)算且速度雅可比矩陣元素表述復(fù)雜,物理意義不明確,用于不規(guī)則地形下輪式機(jī)器人的運(yùn)動學(xué)建模。幾何法是根據(jù)剛體運(yùn)動時(shí)不同剛體、桿件之間的幾何約束,建立運(yùn)動學(xué)方程式,該方法比較直觀、易懂,用于模型簡單場合。輪心建模法通過分析多剛體的運(yùn)動以及不規(guī)則地面上輪式移動機(jī)構(gòu)轉(zhuǎn)動角速度特性建立運(yùn)動學(xué)方程式,該方法可準(zhǔn)確、快速建立運(yùn)動學(xué)模型且具有明確物理意義,用于不規(guī)則地形下輪式或輪腿復(fù)合式機(jī)器人的運(yùn)動學(xué)模型。
輪式機(jī)器人的動力學(xué)分析方法主要有拉格朗日方程、牛頓-歐拉方程、凱恩方程法和虛功原理等。拉格朗日方程只需計(jì)算系統(tǒng)的動勢能,動力學(xué)方程式簡單、整齊,但需計(jì)算動能的導(dǎo)數(shù)和偏導(dǎo)數(shù),部件增加時(shí),其計(jì)算量呈幾何級數(shù)增加,因此適用于較簡單的動力學(xué)方程,以避免方程中出現(xiàn)內(nèi)力項(xiàng)。牛頓-歐拉方程應(yīng)用質(zhì)心動量矩定理列出隔離體的動力學(xué)方程,內(nèi)力項(xiàng)物理意義明確,可表達(dá)系統(tǒng)完整受力關(guān)系,但其方程數(shù)量大,計(jì)算效率低,多用于實(shí)時(shí)控制。凱恩方程以矢量運(yùn)算為基礎(chǔ),無需計(jì)算各部件動勢能的導(dǎo)數(shù)和偏導(dǎo)數(shù),計(jì)算量小,可推導(dǎo)相應(yīng)的遞推公式,但只適用于串聯(lián)機(jī)構(gòu)。虛功原理依據(jù)系統(tǒng)外力和慣性力因?yàn)槲灰贫龅奶摴χ停瑒恿W(xué)方程簡潔,能表示出各構(gòu)件的耦合性,但不宜求解復(fù)雜系統(tǒng)的虛功,適用于構(gòu)件較少的串并聯(lián)系統(tǒng)。
4 結(jié)論
輪式移動機(jī)器人的研究主要有機(jī)構(gòu)、動力和運(yùn)動控制三個(gè)方面的內(nèi)容。輪式移動機(jī)器人由于車輪布置形式以及車身結(jié)構(gòu)的不同,對地形的適應(yīng)能力以及動力學(xué)特性也有著很大的不同。因此,在設(shè)計(jì)輪式移動機(jī)器人時(shí),要綜合考慮考慮工作環(huán)境、控制精度、靈活性、運(yùn)動學(xué)和動力學(xué)特性。
猜你喜歡
北京航空航天大學(xué)學(xué)報(bào)(2022年6期)2022-07-02 01:59:12
四川輕化工大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年3期)2021-08-30 06:37:02
中國慣性技術(shù)學(xué)報(bào)(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
智能系統(tǒng)學(xué)報(bào)(2015年4期)2015-12-27 09:38:35
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年5期)2014-03-11 16:42:32
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:09
中國海洋大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31
中國海洋大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年7期)2014-02-28 12:21:19