融合高斯過(guò)程回歸的UKF估計(jì)方法
2019-06-26 09:02:00葉文蔡晨光楊平李建利
北京航空航天大學(xué)學(xué)報(bào) 2019年6期
葉文,蔡晨光,楊平,李建利
(1.中國(guó)計(jì)量科學(xué)研究院 力學(xué)與聲學(xué)計(jì)量科學(xué)研究所,北京100029;2.北京航空航天大學(xué) 儀器科學(xué)與光電工程學(xué)院,北京100083)
高精度位置姿態(tài)測(cè)量系統(tǒng)(Position and Orientation System,POS)本質(zhì)是一個(gè) SINS/GNSS非線性組合系統(tǒng),其通過(guò)非線性濾波方法,如擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF)、無(wú)跡卡爾曼濾波(Unscented Kalman Filter,UKF),融合來(lái)自GNSS和SINS的位置、速度等運(yùn)動(dòng)參數(shù),估計(jì)SINS的狀態(tài)誤差,進(jìn)而為載荷提供可靠、高頻、高精度的運(yùn)動(dòng)信息[1-2]。無(wú)論是線性濾波還是非線性濾波,都需要事先精確建立慣導(dǎo)誤差模型和確定噪聲統(tǒng)計(jì)特性[3-4]。然而,這存在 2個(gè)嚴(yán)重問(wèn)題:①精確建立誤差模型幾乎不可能,因?yàn)橄到y(tǒng)復(fù)雜時(shí)變;②已知噪聲統(tǒng)計(jì)特性會(huì)隨著系統(tǒng)的工作狀態(tài)變化而變化。眾所周知,由于后處理平滑利用了所有可觀測(cè)的信息,理論上其具有最高的估計(jì)精度[5-6]。因此,一方面,后處理平滑結(jié)果可作為基準(zhǔn)數(shù)據(jù);另一方面,濾波估計(jì)方法仍有提升的空間。然而,怎樣提升濾波估計(jì)精度是一個(gè)很有挑戰(zhàn)的難題。
隨著機(jī)器學(xué)習(xí)的發(fā)展,該問(wèn)題得以解決。尤其是以高斯過(guò)程回歸(Gaussian Process Regression,GPR)為主的無(wú)參數(shù)回歸方法,具有不確定度輸出、非線性映射、隨機(jī)性預(yù)測(cè)等優(yōu)點(diǎn),很適合與貝葉斯濾波方法進(jìn)行結(jié)合[7-11]。因此,針對(duì)UKF不可能把系統(tǒng)的所有誤差源都考慮到,導(dǎo)致UKF的預(yù)測(cè)和估計(jì)能力仍有局限性的問(wèn)題,本文提出了一種增強(qiáng)高斯過(guò)程的UKF(Enhanced GPUKF,EGP-UKF)方法。該方法的核心思想是利用GP學(xué)習(xí)濾波估計(jì)值與后處理平滑估計(jì)值之間的殘差。
本文詳細(xì)論述了如何使用非參數(shù)GP學(xué)習(xí)狀態(tài)模型和量測(cè)模型與真實(shí)值(平滑)之間的殘差,以及如何無(wú)縫地把這些殘差融合到UKF中。由此產(chǎn)生的EGP-UKF方法具有非參數(shù)GP的優(yōu)點(diǎn):①EGP-UKF方法取決于已建立的狀態(tài)模型和量測(cè)模型,但不需要完全精確的數(shù)學(xué)模型,而且也取決于GP模型,EGP-UKF模型及其參數(shù)可以從較少的訓(xùn)練數(shù)據(jù)中學(xué)習(xí)得到;②EGP-UKF方法考慮了動(dòng)態(tài)模型的不確定性。此外,UKF可避免因沒(méi)有足夠的訓(xùn)練數(shù)據(jù)引起的EGP-UKF更多不確定性。通過(guò)車(chē)載實(shí)驗(yàn)驗(yàn)證了EGP-UKF方法的估計(jì)性能,實(shí)驗(yàn)結(jié)果表明,該方法可明顯提高 POS的濾波估計(jì)精度。
1 SINS/GNSS組合導(dǎo)航
1.1 非線性慣導(dǎo)誤差模型及狀態(tài)方程
本文采用基于角誤差模型的非線性姿態(tài)誤差方程,該非線性誤差模型是UKF的基礎(chǔ)。首先定義坐標(biāo)系,i為慣性坐標(biāo)系,p為平臺(tái)坐標(biāo)系,n為導(dǎo)航坐標(biāo)系,b為載體坐標(biāo)系,e為地球坐標(biāo)系。
1.1.1 姿態(tài)誤差微分方程

式中:φ=[φEφNφU]T描述數(shù)學(xué)平臺(tái)坐標(biāo)系與導(dǎo)航坐標(biāo)系之間的失準(zhǔn)角;Cpn為平臺(tái)坐標(biāo)系p到導(dǎo)航坐標(biāo)系n的方向余弦矩陣;ωnin為投影在導(dǎo)航坐標(biāo)系n下的導(dǎo)航坐標(biāo)系n相對(duì)于慣性坐標(biāo)系i的角速度;δωnin為其誤差;εb=[εxεyεz]T為陀螺儀隨機(jī)漂移在載體坐標(biāo)系b的投影;為從載體坐標(biāo)系b到導(dǎo)航坐標(biāo)系n方向余弦陣Cnb的估計(jì);(I-Cpn)ωnin為姿態(tài)誤差微分方程中的非線性部分。
1.1.2 速度誤差微分方程

式中:V=[VEVNVU]T為導(dǎo)航坐標(biāo)系 n投影下的速度;δV為其誤差為加速度計(jì)所測(cè)比力在載體坐標(biāo)系b上的投影;為加速度計(jì)隨機(jī)偏置誤差在載體坐標(biāo)系b下的投影為速度誤差微分方程中的非線性項(xiàng)。
1.1.3 位置誤差微分方程

式中:δL、δλ和 δH分別為緯度、經(jīng)度和高度誤差;RN和 RM分別為橢球卯酉圈和子午圈曲率半徑。
1.1.4 慣性器件方程
慣性測(cè)量單元由3個(gè)陀螺儀和3個(gè)加速度計(jì)組Δ成。假設(shè)陀螺儀隨機(jī)Δ誤差ε和加速度計(jì)隨機(jī)Δ誤差 包括隨機(jī)常數(shù) εc、c和高斯白噪聲 εg、g。雖然隨機(jī)常值每次啟動(dòng)不同,但啟動(dòng)后是確定的。因此,陀螺儀和加速度計(jì)的隨機(jī)誤差如下:

SINS/GNSS組合導(dǎo)航系統(tǒng)的狀態(tài)方程可以通過(guò)誤差模型(包括姿態(tài)誤差、速度誤差、位置誤差、慣性器件陀螺儀和加速度計(jì)的誤差)獲得,其對(duì)應(yīng)的狀態(tài)方程為式(1)~式(3)和式(5)。
1.2 量測(cè)方程
量測(cè)方程是一個(gè)離散的線性方程,通過(guò)SINS捷聯(lián)解算的速度/位置和 GNSS的速度/位置差得到。
式中:xk為 POS的狀態(tài)向量;VGE、VGN和 VGU分別為 GNSS的東向、北向和天向速度;LGNSS、λGNSS和HGNSS分別為GNSS測(cè)量所得的緯度、經(jīng)度和高度;ZV(k)和HV分別為速度量測(cè)信息和速度量測(cè)矩陣;ZP(k)和HP分別為位置量測(cè)信息和位置量測(cè)矩陣;MV和NP分別為GNSS的速度和位置噪聲。


1.3 UKF方法
UKF是Sigma點(diǎn)卡爾曼濾波的一種,通過(guò)UT非線性變換逼近非線性系統(tǒng)狀態(tài)的后驗(yàn)均值和協(xié)方差,估計(jì)精度至少能達(dá)到二階泰勒以上,且不需要計(jì)算雅可比矩陣。
2 高斯過(guò)程
GP是一組隨機(jī)變量的集合,且集合中任意數(shù)量的隨機(jī)變量都應(yīng)滿足聯(lián)合高斯分布的隨機(jī)過(guò)程,由均值函數(shù)和協(xié)方差函數(shù)確定[12-13]。

式中:xi,xj∈Rd為任意隨機(jī)變量。

式中:xi為輸入量,yi為輸出量,它們分別組成了Xin和為均值為零的高斯白噪聲。
訓(xùn)練集中的Yout和測(cè)試點(diǎn)x*的預(yù)測(cè)值y*的聯(lián)合分布為
式中:K(Xin,Xin)為對(duì)稱(chēng)的協(xié)方差矩陣;σn為 n維高斯噪聲矩陣;In為n維單位矩陣;μ*為均值;Σ*為方差。
為了實(shí)現(xiàn)最優(yōu)的訓(xùn)練效果,通常采用高斯核函數(shù),如下:

式中:θ={S,σ2f,σ2n}為超參數(shù),可通過(guò)對(duì)數(shù)極大似然函數(shù)求解后驗(yàn)分布獲得;σ2f為信號(hào)方差。一般采用共軛梯度方法求解最優(yōu)超參數(shù)。函數(shù)的偏導(dǎo)數(shù)如下:
式中:C=K(Xin,Xin)+σ2nIn;α=(K(Xin,Xin)+σ2nIn)-1Yout。
3 EGP-UKF模型
3.1 學(xué)習(xí)狀態(tài)方程和量測(cè)方程
EGP-UKF是一種融合數(shù)學(xué)模型和數(shù)據(jù)模型各自?xún)?yōu)勢(shì)的高精度濾波模型。利用GP學(xué)習(xí)UKF的狀態(tài)方程和量測(cè)方程以及協(xié)方差陣Q和R。針對(duì)多維誤差模型,采用 GP學(xué)習(xí)UKF中的每一個(gè)狀態(tài)估計(jì)值和真值之間的差值,且每個(gè)GP的訓(xùn)練數(shù)據(jù)都是一組輸入輸出關(guān)系。采用GP學(xué)習(xí)狀態(tài)模型的殘差時(shí),首先求解UKF濾波估計(jì)值和后處理平滑值;然后將狀態(tài)模型中當(dāng)前時(shí)刻的狀態(tài)映射到狀態(tài)變化量。量測(cè)模型由狀態(tài)映射到觀測(cè),它們分別是由SINS/GNSS組合導(dǎo)航系統(tǒng)后處理平滑和差分GNSS計(jì)算得到的。狀態(tài)模型和量測(cè)模型的訓(xùn)練數(shù)據(jù)集的形式分別表示為

式中:xsk+1為后處理平滑估計(jì)狀態(tài)量;zsk+1為捷聯(lián)
慣導(dǎo)解算結(jié)果和差分GNSS之差。采用GP學(xué)習(xí)狀態(tài)模型和量測(cè)模型殘差的數(shù)學(xué)模型如下:

3.2 EGP-UKF方法流程
經(jīng)過(guò)上述分析,EGP-UKF方法由2個(gè)階段組成:學(xué)習(xí)和估計(jì)。在學(xué)習(xí)殘差模型階段中,采用GP分別進(jìn)行學(xué)習(xí)狀態(tài)模型和量測(cè)模型的訓(xùn)練數(shù)據(jù)),可分別得到狀態(tài)模型和量測(cè)模型的殘差回歸模型及其協(xié)方差陣;在估計(jì)殘差模型階段中,在UKF算法的基礎(chǔ)上,采用GP分別對(duì)狀態(tài)方程和量測(cè)方程的殘差進(jìn)行預(yù)測(cè),并自適應(yīng)獲取其協(xié)方差陣。具體算法如下。
1)初始化
2)計(jì)算 Sigma點(diǎn)

3)時(shí)間更新
4)量測(cè)更新

5)狀態(tài)更新
本文提出的EGP-UKF高精度濾波估計(jì)方法不僅不需要訓(xùn)練數(shù)據(jù)包含整個(gè)誤差狀態(tài)空間,也不需要精確的數(shù)學(xué)模型。正如算法中標(biāo)注“*”的公式所示。EGP-UKF建模可以用來(lái)學(xué)習(xí)狀態(tài)模型和量測(cè)模型,其優(yōu)于參數(shù)模型,特別是當(dāng)參數(shù)模型是不準(zhǔn)確的。GP的殘差模型由GPf和GPg組成,一旦模型被訓(xùn)練好,預(yù)測(cè)模型便可得出:

4 車(chē)載實(shí)驗(yàn)
為了評(píng)價(jià)本文EGP-UKF方法的性能,通過(guò)車(chē)載實(shí)驗(yàn)數(shù)據(jù)驗(yàn)證了UKF、GP-UKF和EGP-UKF的性能。車(chē)載所用的 SINS/GNSS組合導(dǎo)航系統(tǒng)是北京航空航天大學(xué)設(shè)計(jì)的 POS,其由 IMU、GNSS和PCS組成,如圖1所示。此外,為了保證后處理平滑的精度,在實(shí)驗(yàn)過(guò)程中架設(shè)了GNSS地面基準(zhǔn)站,如圖1(c)所示。POS安裝在實(shí)驗(yàn)車(chē)上,如圖 1(b)所示。
為了保證后處理的精度且更好地評(píng)價(jià)EGPUKF的性能,在北京市昌平區(qū)的航空博物館前進(jìn)行了車(chē)載實(shí)驗(yàn)。原因如下:①面積開(kāi)闊,無(wú)GNSS信號(hào)遮擋;②道路相對(duì)平直,約3 km長(zhǎng)。在實(shí)驗(yàn)過(guò)程中,SINS/GNSS組合導(dǎo)航系統(tǒng)運(yùn)行良好,采集所有相關(guān)數(shù)據(jù),如IMU數(shù)據(jù)、GNSS數(shù)據(jù)和實(shí)時(shí)組合導(dǎo)航數(shù)據(jù),時(shí)長(zhǎng)約為2200 s。因此,IMU數(shù)據(jù)和差分GNSS數(shù)據(jù)的平滑結(jié)果可以作為真值,其中前 800 s用來(lái)訓(xùn)練 GP-UKF[14-15]和 EGP-UKF,最后1 400 s評(píng)價(jià)本文方法的性能。車(chē)載實(shí)驗(yàn)軌跡如圖 1(d)所示。

圖1 車(chē)載實(shí)驗(yàn)Fig.1 Vehicle-mounted experiment
圖2~圖 4給出了 EGP-UKF、UKF、GP-UKF在緯度誤差、經(jīng)度誤差和高度誤差上的對(duì)比結(jié)果。在圖2~圖4中,本文提出的EGP-UKF方法和另外2種方法在開(kāi)始階段的性能幾乎相同,一方面,因?yàn)樵陟o止部分參數(shù)模型與后處理平滑模型基本一致,另一方面在靜止部分本文方法的噪聲幾乎和參數(shù)模型一致。如果發(fā)生了機(jī)動(dòng),EGP-UKF精度明顯高于 UKF和 GP-UKF。因?yàn)?EGP-UKF不僅能自適應(yīng)調(diào)節(jié)系統(tǒng)噪聲和量測(cè)噪聲,而且還考慮了模型不確定性,然而UKF未考慮模型不確定性和噪聲的影響。盡管GP-UKF考慮了噪聲的影響,但該方法嚴(yán)重依賴(lài)數(shù)據(jù)模型,未考慮系統(tǒng)本身的數(shù)學(xué)模型。機(jī)動(dòng)之后,本文方法也明顯優(yōu)于其他2種方法,因?yàn)镋GP-UKF在系統(tǒng)誤差模型的基礎(chǔ)上進(jìn)一步利用了數(shù)據(jù)模型,抑制了系統(tǒng)誤差模型不確定度的影響。事實(shí)上,模型的不確定主要由參數(shù)模型和相應(yīng)的平滑之間的殘差組成。在某種程度上,EGP-UKF可以學(xué)習(xí)和預(yù)測(cè)這種模型不確定性帶來(lái)的殘差,并減輕其帶來(lái)的不利影響。
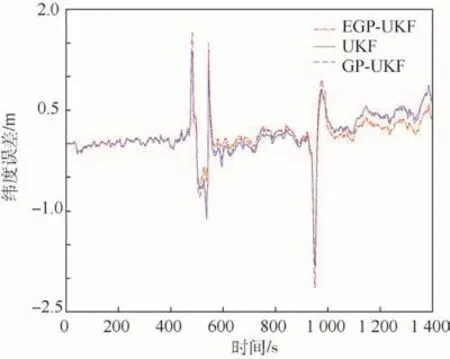
圖2 緯度誤差對(duì)比Fig.2 Comparison of latitude error
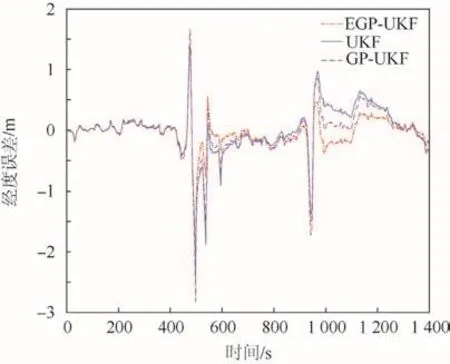
圖3 經(jīng)度誤差對(duì)比Fig.3 Comparison of longitude error
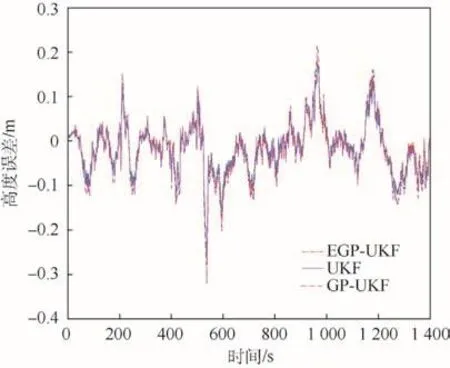
圖4 高度誤差對(duì)比Fig.4 Comparison of altitude error
圖5~圖7表明,在東向速度誤差和北向速度誤差方面,EGP-UKF比UKF和GP-UKF的精度更高、更穩(wěn)定。一方面,東向速度誤差在圖3所示經(jīng)度誤差一致;另一方面,北向速度誤差變化和圖2所示的緯度誤差變化一致,符合慣性導(dǎo)航系統(tǒng)的誤差傳播定律。由圖4和圖7可知,高度誤差和天向速度誤差幾乎相同。
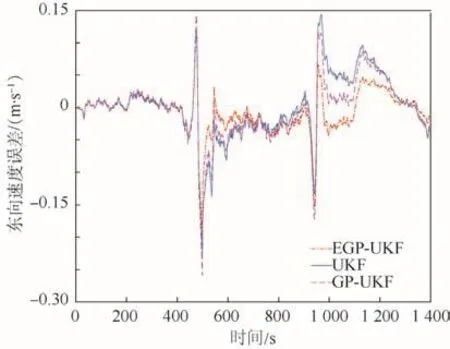
圖5 東向速度誤差對(duì)比Fig.5 Comparison of east velocity error
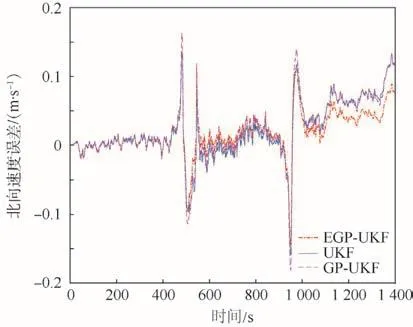
圖6 北向速度誤差對(duì)比Fig.6 Comparison of north velocity error
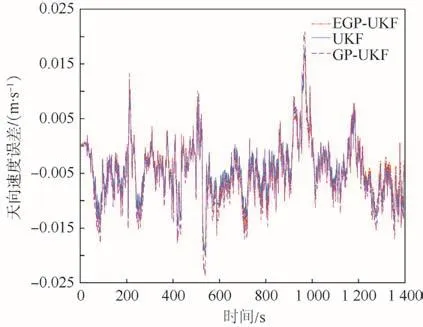
圖7 天向速度誤差對(duì)比Fig.7 Comparison of up velocity error
圖8~圖10表明,在航向角誤差、俯仰角誤差和橫滾角誤差方面,本文 EGP-UKF方法明顯優(yōu)于UKF和GP-UKF。可以看出,EGP-UKF的收斂速度比UKF和GP-UKF更快。此外,在航向角誤差方面 EGP-UKF與 UKF、GP-UKF幾乎是相同的。
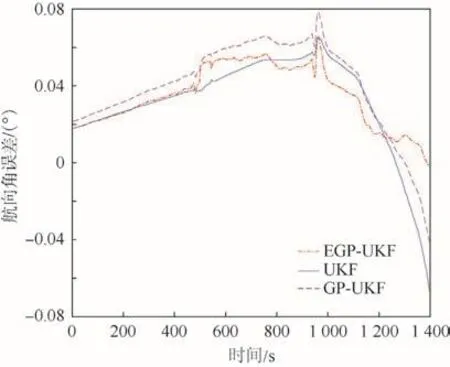
圖8 航向角誤差對(duì)比Fig.8 Comparison of heading angle error
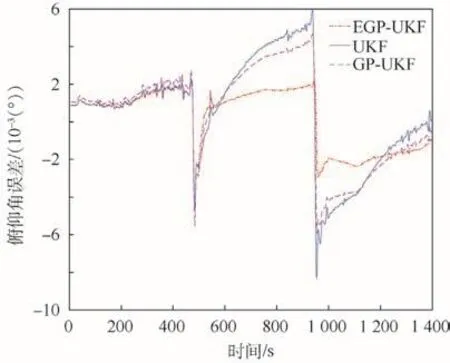
圖9 俯仰角誤差對(duì)比Fig.9 Comparison of pitch angle error
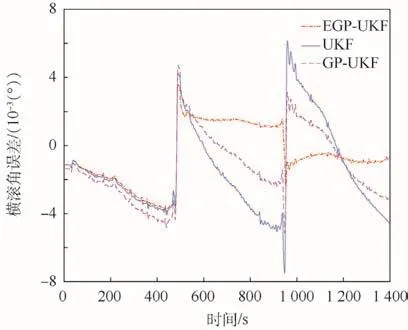
圖10 橫滾角誤差對(duì)比Fig.10 Comparison of roll angle error
本文定量分析了3種方法的性能。相比GPUKF和 UKF,本文 EGP-UKF在緯度誤差和經(jīng)度誤差分別降低了 18.5%、24.6%和 9.1%、10.6%。在高度誤差方面,這3種方法幾乎相同。東向速度誤差和北向速度誤差分別降低了42.5%、43.3%和22.6%、24.3%。因?yàn)樘煜蛩俣群透叨鹊南嚓P(guān)性,天向速度誤差幾乎是相同的。此外,航向角誤差、俯仰角誤差和橫滾角誤差分別降低了10.3%、30.1%、24.6%和3.4%、24.7%、28.2%。總之,EGP-UKF學(xué)習(xí)了UKF和其后處理平滑之間的殘差模型,通過(guò)該殘差模型提高了POS的測(cè)量精度。
在一般情況下,UKF的計(jì)算復(fù)雜度為狀態(tài)向量的維數(shù)的二次方。然而,GP在學(xué)習(xí)和預(yù)測(cè)過(guò)程中的計(jì)算復(fù)雜度分別是訓(xùn)練數(shù)據(jù)的三次方和二次方,故 GP-UKF比 UKF運(yùn)算速度慢,另外由于EGP-UKF融合了 GP和 UKF共同的優(yōu)點(diǎn),所以EGP-UKF的運(yùn)算速度比GP-UKF慢。
5 結(jié) 論
1)針對(duì)傳統(tǒng)非線性濾波模型不確定性的問(wèn)題,提出了增強(qiáng) GP的UKF方法。該方法既充分利用了GPR和UKF的優(yōu)點(diǎn),又克服了它們自身的缺點(diǎn)。
2)該方法的核心是通過(guò)非參數(shù) GP學(xué)習(xí)UKF的狀態(tài)方程、量測(cè)方程和后處理平滑之間的殘差。
3)車(chē)載實(shí)驗(yàn)結(jié)果表明,與 UKF、GP-UKF相比,EGP-UKF具有更高的估計(jì)精度,因?yàn)?EGPUKF不僅具有更強(qiáng)的不確定度預(yù)測(cè)能力,而且具有更強(qiáng)的泛化能力。
4)如何提高EGP-UKF的實(shí)時(shí)性是未來(lái)的一個(gè)研究方向。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2020年20期)2020-12-15 15:53:19
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
能源(2018年10期)2018-12-08 08:02:48
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
能源(2016年10期)2016-02-28 11:33:30
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
