基于加速度計的智能網聯汽車駕駛行為建模方法
2019-06-25 01:53:30宋海娜
移動通信 2019年4期
宋海娜

【摘? 要】駕駛行為建模能判斷車輛行駛過程中是否出現如緊急制動、緊急轉彎等狀況。為了更好更準確地獲取這些駕駛行為,設計出基于加速度計的駕駛行為建模方法,并在北斗車載終端中實現此算法。本建模方法能實時準確地分析出車輛在駕駛過程中出現的各種狀態,該方法在智能網聯汽車的自動駕駛應用中具有很好的實用價值。
【關鍵詞】自動駕駛;駕駛行為分析;加速度計;智能網聯汽車
中圖分類號:TN929.5
文獻標志碼:A? ? ? 文章編號:1006-1010(2019)04-0081-04
[Abstract]?Driving behavior modeling can determine whether emergency braking, sharp turn and other situations happen in the process of driving. In order to obtain these driving behaviors more accurately, a driving behavior modeling method based on the accelerometer is designed and implemented in the Beidou vehicular terminal. This modeling method can quickly and accurately analyze various states of vehicles in the process of driving in real time. The proposed method has good practical value in the application of automatic driving of intelligent connected vehicles.
[Key words]automatic driving; driving behavior analysis; accelerometer; intelligent connected vehicle
1? ?引言
智能網聯汽車主要運用了汽車工程、人工智能、計算機、微電子、自動控制、通信與平臺、傳感器等核心技術,它是一個集環境感知、規劃決策、控制執行和信息交互等為一體的高新技術綜合體[1]。其中,車輛狀態識別技術是智能交通的基礎,是實現交通信息智能感知的關鍵技術,對于規劃決策和控制執行有著極其重要的意義[7]。
駕駛行為分析的實現有多種方法,如視頻、圖像分析算法,加速度計算法,行車電腦數據分析方法等。本文提出了一種采用加速度計和全姿態測量傳感器進行車輛自動駕駛過程中的狀態采集和識別的方法,研究了幾種關鍵場景的識別技術,如緊急剎車制動、轉彎、側翻等。目前已經搭建了一套驗證系統并進了多次實車路測實驗。
2? ?傳感器輸出的數據處理
2.1? 卡爾曼濾波
2.2? 運動加速度的修正
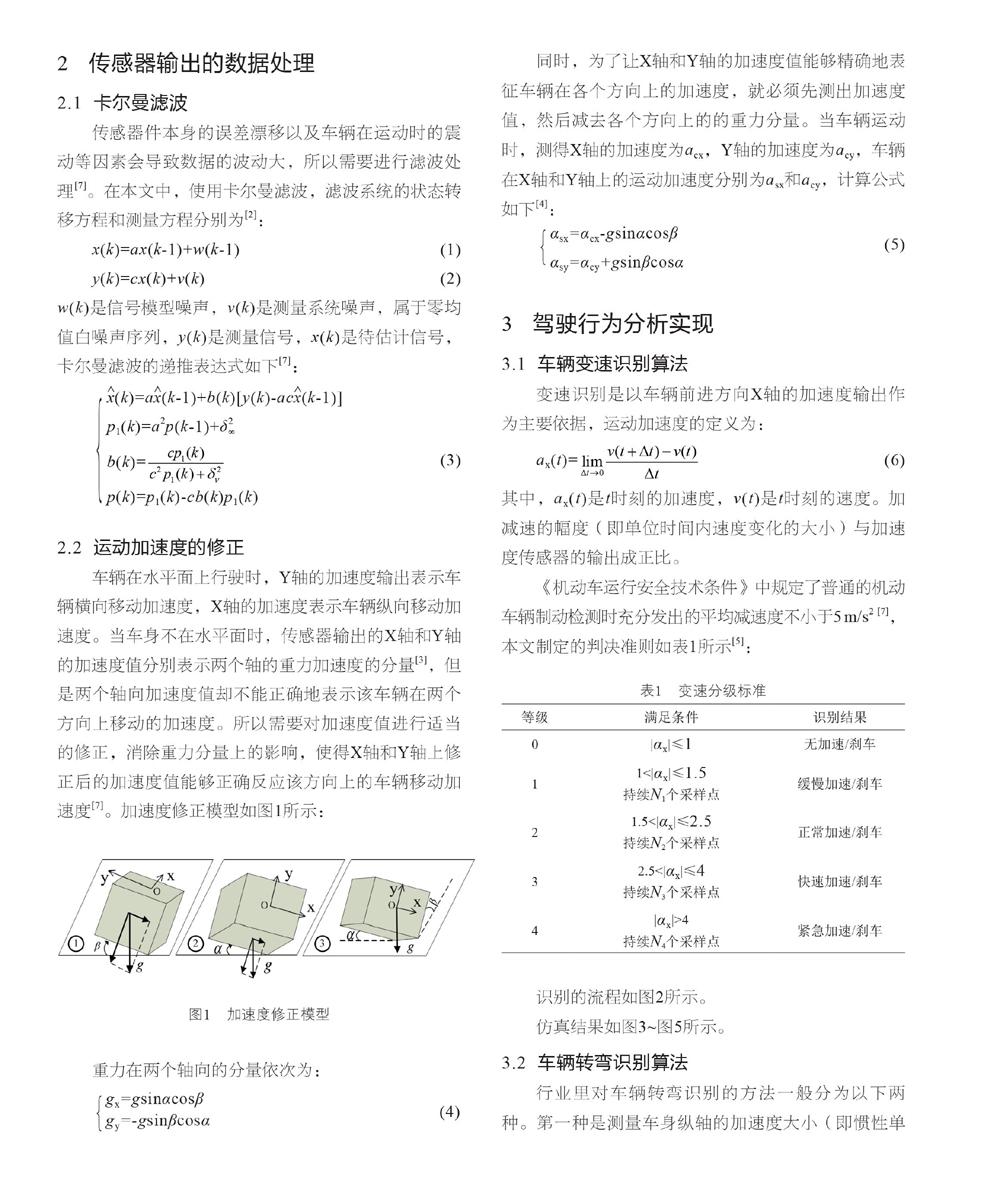
車輛在水平面上行駛時,Y軸的加速度輸出表示車輛橫向移動加速度,X軸的加速度表示車輛縱向移動加速度。當車身不在水平面時,傳感器輸出的X軸和Y軸的加速度值分別表示兩個軸的重力加速度的分量[3],但是兩個軸向加速度值卻不能正確地表示該車輛在兩個方向上移動的加速度。所以需要對加速度值進行適當的修正,消除重力分量上的影響,使得X軸和Y軸上修正后的加速度值能夠正確反應該方向上的車輛移動加速度[7]。加速度修正模型如圖1所示:
3? ?駕駛行為分析實現
3.1? 車輛變速識別算法
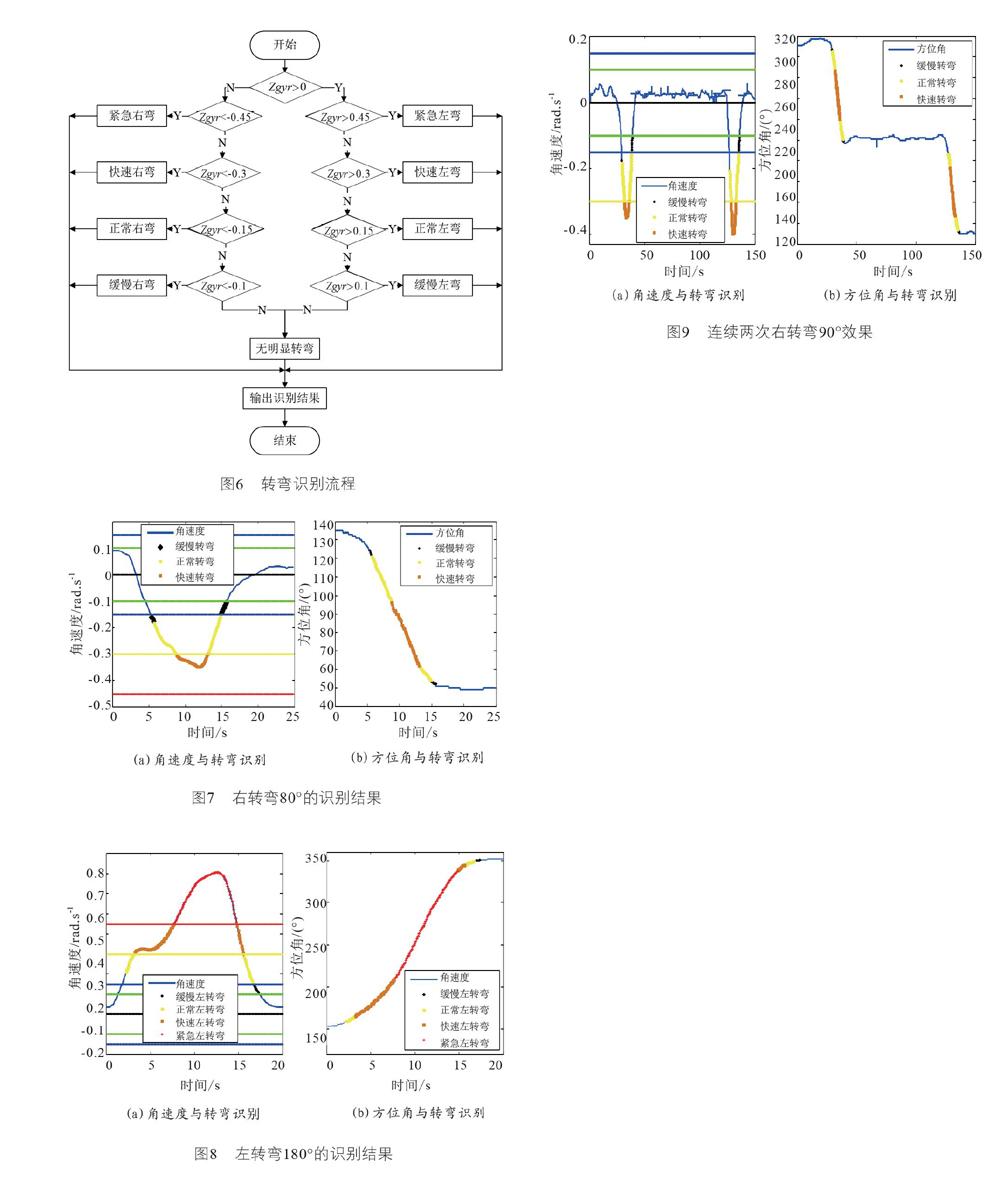
3.2? 車輛轉彎識別算法
行業里對車輛轉彎識別的方法一般分為以下兩種。第一種是測量車身縱軸的加速度大小(即慣性單元Y軸的加速度大小),而Y軸加速度是轉彎角速度和線速度的乘積,因此即使轉彎幅度相同但線速度不同時,加速度值也相差很大,非常容易造成誤判。第二種是根據方位角和角速度信息,車輛在XY平面上轉彎時,Z軸角速度的變化最為顯著。在本文中,以Z軸角速度變化作為識別車輛轉彎狀態的主要依據[6-7]。
4? ?結束語
本文核心算法是在基于STM32處理器的北斗車載定位終端中實現了駕駛行為分析,并對各種大/中/小型汽車在行駛過程中進行多次數據采集,通過實車測試得出各種駕駛行為狀態下的經驗加速度閾值,對各種車型都具有很強的參考價值。
參考文獻:
[1] 李克強,戴一凡,李升波,等. 智能網聯汽車(ICV)技術的發展現狀及趨勢[J]. 汽車安全與節能學報, 2017(1): 1-14.
[2] 戴高偉. GPS/INS組合車輛導航系統的兩種卡爾曼濾波結構[J]. 太赫茲科學與電子信息學報, 2008,6(6): 420-423.
[3] 白占元,徐皚冬. 基于MEMS的傾角測量儀設計[C]//儀表自動化及先進集成技術大會, 2007.
[4] 唐霓葉. 基于上下文感知的乘車感知算法研究和實現[D]. 成都: 電子科技大學, 2015.
[5] 徐瑩,左付山,曾婷婷. 基于雷達測速技術的混動汽車道路制動性能分析[J]. 汽車實用技術, 2014(3): 40-43.
[6] Tunick M. Privacy in Public Places: Do GPS and Video Surveillance Provide Plain Views?[J]. Social Theory & Practice, 2009,35(4): 597-622.
[7] 鄧忠. 基于車載自組織網的車輛狀態識別與駕駛行為評估[D]. 廣州: 華南理工大學, 2015.
