基于改進重采樣的粒子濾波紅外車輛跟蹤算法
2019-06-25 09:54:06馬天超
無線電工程 2019年7期
關鍵詞:方法
馬天超
(哈爾濱工程大學 信息與通信工程學院,黑龍江 哈爾濱 150001)
0 引言
在目前的多種目標跟蹤算法中,常用于紅外目標跟蹤的主要分為基于圖像對比度分析的方法[1],基于圖像特征匹配的方法[2]及基于核的目標跟蹤方法[3]。對于背景均勻的包含目標的圖像,目標與背景差異較大,基于圖像對比度分析的方法主要是通過目標與背景的灰度信息差異來進行跟蹤,對于復雜背景目標,此類方法效果較差,基于對比度的跟蹤方法主要分為質心跟蹤[4]及邊緣跟蹤[5]。基于特征匹配的目標跟蹤方法利用目標在連續幀圖像中所具有的某種特征,在后續圖像中完成特征匹配,達成目標跟蹤。用于目標跟蹤的特征有Haar特征[6]、SIFT特征[7]和直方圖特征[8]等,對于某些紅外圖像,灰度特征不夠豐富[9],于是與形狀相關的特征則更為常用。基于核方法的跟蹤算法主要通過估計目標的后驗概率密度函數來得到目標的狀態,也就是先進行預測再跟蹤,Meanshift算法[10]是最先被開發使用的該類方法,利用了先預測再進行跟蹤的思想,相對于提取全局信息進行跟蹤而言是一個較大的改進。基于Meanshift算法的理論,后續實驗人員對其進行了改進,保留其核方法的本質,相繼研究出Kalman濾波[11]、粒子濾波[12]等多種可應用于紅外圖像的核方法。高璐等人[13]提出一種紅外序列圖像目標跟蹤的自適應Kalman濾波方法,利用函數估計的思想改進了目標運動模型,將最小二乘支持向量機應用于對當前目標運動模型的估計,取得了良好的效果。李蔚[14]等人提出了一種多特征融合的優化粒子紅外目標跟蹤方法,融合目標梯度特征[15]和灰度特征建立觀測模型并自適應更新模板,能夠顯著改善目標受遮擋狀況。
本文對傳統粒子濾波算法中的狀態方程進行更新,對重采樣過程進行改進,提出基于改進粒子濾波算法的紅外圖像目標跟蹤算法。
1 紅外車輛目標跟蹤
紅外車輛目標跟蹤算法流程如圖1所示。

圖1 紅外車輛目標跟蹤算法流程
① 預處理階段:對紅外圖像進行Top-Hat變換,除去與目標相近的背景;
② 目標檢測階段:利用圖像準則進行圖像信息融合,對目標位置進行標定;
③ 目標跟蹤階段:利用圖像準則對粒子濾波狀態方程進行改進,并對粒子濾波重采樣方法進行改進,完成紅外車輛圖像檢測與跟蹤。
2 預處理與目標檢測
2.1 預處理階段
通常狀況下,對于紅外圖像增強需要應用形態學濾波,經過處理后的紅外圖像會更加適合進行特征提取、目標識別等后續工作。研究者提出圖像形態學Top-Hat變換[16],通過選擇合適的結構元素,對原圖像實施開運算獲取圖像的背景信息,再利用原圖像減去開運算后圖像,即可完成圖像的Top-Hat變換,如圖2所示。

圖2 Top-Hat仿真結果
2.2 檢測階段
紅外圖像序列有其特有性質,將此類性質定義為圖像準則。本研究中用到的圖像準則包括圖像的面積準則、灰度準則、位置準則及幀間速度加速度差異等。
圖像的面積準則通過比較前后兩幀目標區域的面積,排除非感興趣區域或無目標區域,長寬比與圓形度是衡量圖像面積準則的重要參數。圖像的長寬比是目標長與寬的比值;圓形度為衡量與圓近似程度的值,定義為e=4πs/c2,其中s是圖像面積,c是周長。圓的圓形度為1,圖像越扁,其圓形度越小,現隨機取多幀圖像序列并對其進行研究。在目標檢測過程和跟蹤過程中,首先利用紅外面積準則與灰度準則來篩選疑似目標,對于面積明顯過大目標及長寬比較大(線形)目標予以排除。同時,在粒子濾波應用過程中也可利用面積準則來維持跟蹤的穩定性。對于灰度與面積準則滿足要求的目標,根據目標的位置即可將目標區分,同時在跟蹤過程中,幀間位置差可代替速度的變化,由這些速度帶來的加速度改變也可作為狀態方程的重要部分,對紅外車輛圖像序列進行分析,紅外車輛目標長寬比與圓形度信息如表1所示。
表1 紅外車輛目標長寬比與圓形度
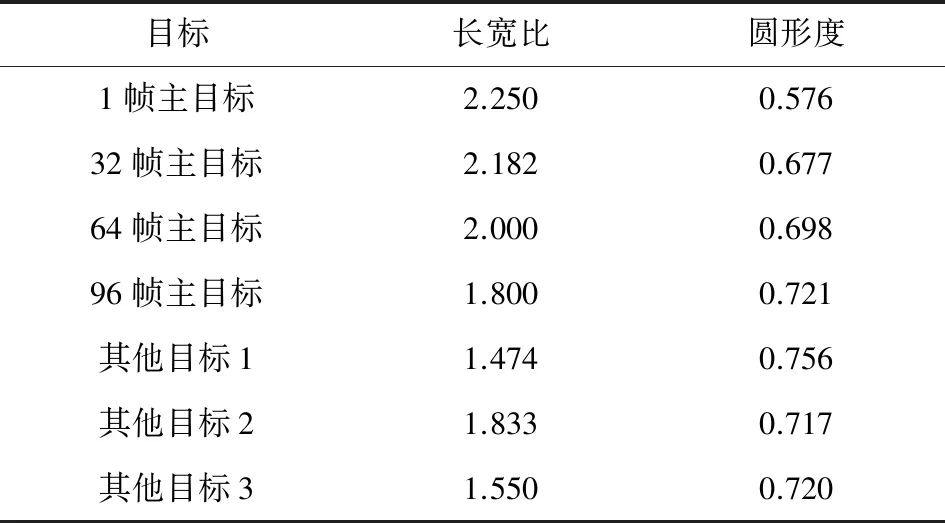
目標長寬比圓形度1幀主目標2.2500.57632幀主目標2.1820.67764幀主目標2.0000.69896幀主目標1.8000.721其他目標11.4740.756其他目標21.8330.717其他目標31.5500.720
分析表1中長寬比與圓形度,紅外車輛目標長寬比信息穩定在1.5~3,圓形度穩定在0.50~0.75。由此可得出結論,綜合運用圖像準則的圖像融合方式可在目標的檢測跟蹤過程中得到應用。
3 目標跟蹤
3.1 算法流程
基于上述對圖像信息融合的論證,將對狀態轉移方程進行更新,新的狀態轉移方程融合了圖像的速度,面積準則,位置準則,灰度準則,與幀間目標大小。此方法與文中提到的方法相比計算量較小,能顯著降低粒子濾波使用的粒子數目。
算法流程如下:
① 提取圖像,進行預處理;
② 初始化粒子:利用圖像準則對疑似目標進行標定,初始化粒子參數,其坐標即為標定中心,作為初始模板,獲取當前的目標狀態,將粒子均勻散布于目標上(以目標中心為粒子散布中心);記錄此時中心坐標為跟蹤起始點(x,y);
③ 狀態轉移:下一幀起開始進行粒子濾波過程,記錄本幀坐標,根據兩幀間位置差可計算x軸及y軸速度,若兩幀間圓形度相差過大時,認為目標丟失,重新檢測目標位置。
以x軸為例,在預測后續位置時,將記錄連續4幀間的速度v1,v2,v3,v4,并設權值mi對預測速度vpx進行調整,每幀速度應與前一幀速度有較大相關性;同時利用4幀間速度求得加速度a1,a2,a3也將被用于預測方程中,其權值為nk,定義如下:
vpx=∑vimi+∑aknk+Δ,
(1)
式中,Δ為高斯隨機數,對粒子群進行微調,使其均勻分布在預測位置周圍,同理可得y軸預測方向。當幀間速度趨于穩定時,式中第二項對速度預測影響將會變小;每個速度的預測值均與前一幀相關性較大。
則每個粒子預測位置為:
xp=xpre+vpxt,
(2)
yp=ypre+vpyt。
(3)
④ 權值選擇及最終預測位置確定:每幀跟蹤時會獲得多個預測位置,通過加權來獲取最終預測位置,第一幀時設定每個粒子權值均為1/N,第二幀起,權值由重采樣及與真實位置的巴氏距離來決定。
巴氏距離及巴氏系數定義如下:
DB(p,q)=-ln(BC(p,q)),
(4)
(5)
觀測方程:對粒子在這一狀態的評價。即這個狀態與最優相比的好壞程度,決定后續權重的大小。最終位置為St=∑WiSpi,Wi為各粒子權值,Spi為各粒子對應預測位置。
⑤ 粒子狀態更新及重采樣:對于本幀已實現跟蹤過程的粒子,在下一幀預測狀態時為了保證其準確性要進行狀態更新,在此進行改進系統重采樣來抑制退化現象,完成粒子狀態更新過程;然后,進入下一幀的跟蹤過程。
3.2 重采樣改進
首先設定權值閾值w0,粒子數目閾值T,粒子總數N,對高于閾值w0權值的粒子進行保留,并對其進行系統重采樣來生成T個粒子;再取低于該閾值的粒子權重的粒子進行系統重采樣生成剩余N-T個粒子;最后將這N-T個粒子與對應的高權值粒子進行加權,生成新的粒子權重作為這部分粒子的權重,剩余粒子的位置也由高權值與低權值粒子的位置共同決定,具體步驟如下:
④ 綜合兩部分粒子,進行權值歸一化,完成后續操作。
4 實驗結果與分析
4.1 實驗環境
分別對改進系統重采樣方法及改進粒子濾波方法進行實驗仿真,并與傳統方法比較其優劣性,實驗環境為普通個人筆記本電腦,系統Windows 10,CPU:Intel(R) Core(TM) i7-8750H,主頻2.60 GHz,內存:8.00 GB。軟件環境為Matlab 2017a,Visual Studio 2012。
4.2 實驗分析
對于重采樣方法,常用ARIMA模型進行仿真:
xk=xk-1/2+25xk-1/(1+xk-12)+8cos1.2k+wk,
(6)
yk=xk2/20+vk,
(7)
式中,k表示狀態時刻;xk表示狀態量;yk表示觀測量,狀態初始值為x0=0.1,初始分布為p(x0)~N(0,5.0),過程噪聲w~N(0,5.0),觀測噪聲v~N(0,1.0),粒子數目取100,500,1 000;對5種方法分別采取50次獨立實驗,針對多項式重采樣,系統重采樣,分層重采樣,殘差重采樣,改進重采樣5種重采樣方法進行復雜度及運行時間對比,結果如表2所示。
表2 重采樣算法比較

算法名稱多項式系統分層殘差改進算法復雜度O(nlogn)O(n)O(n)O(n)O(n)運行時間/s0.024 10.012 50.012 50.019 00.020 70.125 60.061 00.063 80.096 50.102 20.263 70.123 20.125 90.189 20.196 8
綜上所述,隨著粒子數目的增加,各種算法運行時間呈線性變化。在粒子濾波進行過程中仍無法避免退化現象的發生,伴隨著粒子濾波的進行,跟蹤誤差將會逐漸變大,這在后續仿真中也有所體現,但是在生成新粒子方面,改進系統重采樣與殘差重采樣均生成新粒子,這對補充粒子種類,抑制退化現象有一定的幫助。
在粒子濾波跟蹤過程中采用960×720像素大小的紅外序列2×200幀。實驗中,標準系統重采樣粒子濾波算法(PF),改進系統殘差重采樣粒子濾波(PFRSR),基于方向梯度的粒子濾波算法(PF/WS)作為同類算法進行比較,設定粒子數目為500。這里引入均方誤差來比較這幾種方法。
紅外圖像序列利用PFIR(Particle Filter Based on Improved Resampling)方法進行跟蹤的結果如圖3和圖4所示。

圖3 紅外圖像序列PFIR跟蹤結果

圖4 紅外圖像序列PFIR跟蹤結果
無論何種算法,隨著跟蹤時間的增長,誤差都在逐漸增大,這也是由于粒子的退化所導致的,4種方法幀間平均均方誤差及運行時間對比如表3所示。
表3 紅外車輛圖像序列跟蹤算法結果
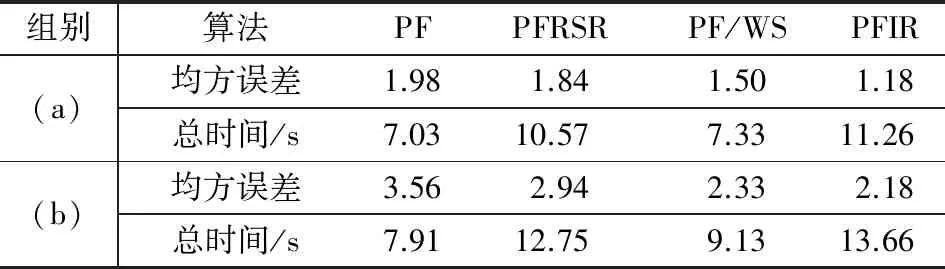
組別算法PFPFRSRPF/WSPFIR(a)均方誤差 1.981.841.501.18總時間/s7.0310.577.3311.26(b)均方誤差 3.562.942.332.18總時間/s7.9112.759.1313.66
對比標準PF算法,在重采樣方面采用殘差系統重采樣的PFRSR算法及在狀態方程中采取方向梯度的PF/WS算法均在跟蹤準確度上有所提升,而狀態方程相較于重采樣方法的更新更為重要,而本文提到的PFIR算法由于分別對狀態方程及重采樣方式進行了改善,導致運行時間方面有所降低。
對于傳統PF算法,隨著圖像序列的增加,抗干擾能力較弱,誤差較大。本文設計的PFIR方法則是從圖像信息入手,以圖像準則作為粒子濾波的輔助手段可以有效排除周圍環境的干擾,但是對較低信噪比及遮擋情況下有待繼續研究。
5 結束語
在傳統的粒子濾波算法中,狀態方程僅由幀間位置決定,整個系統抗干擾能力較弱;在重采樣過程中,傳統方法僅保留大權重粒子剔除小權重粒子,導致粒子衰竭現象的發生。本文提出基于改進粒子濾波算法的紅外圖像目標跟蹤算法,充分利用圖像內部信息,將圖像準則應用于狀態方程,使狀態方程更加完善;對于重采樣則提出改進系統重采樣的方法,將小權重粒子加以保留,與大權重粒子進行加權產生新粒子,保證粒子的多樣性。與傳統PF算法,基于殘差系統重采樣的PFRSR方法,基于方向梯度的PF/WS方法相比跟蹤效果有所提升,兼顧了高權重粒子的保留與新粒子的生成,對粒子濾波退化現象有一定的改善。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
