高速磁懸浮鼓風(fēng)機系統(tǒng)模型改進與實驗*
2019-06-24 10:24:06宋欣達韓邦成
振動、測試與診斷 2019年3期
關(guān)鍵詞:模型
杜 毅, 宋欣達, 韓邦成
(1.北京航空航天大學(xué)慣性重點技術(shù)實驗室 北京,100191) (2.新型慣性儀表與導(dǎo)航系統(tǒng)技術(shù)國防重點學(xué)科實驗室 北京,100191) (3.北京市高速磁懸浮電機技術(shù)及應(yīng)用工程技術(shù)研究中心 北京,100191)
引 言
磁懸浮離心式鼓風(fēng)機具有轉(zhuǎn)速高、功率大、調(diào)速范圍廣等優(yōu)點,在污水處理、高爐鼓風(fēng)等領(lǐng)域已取得廣泛應(yīng)用[1-2]。在大部分的應(yīng)用場合,對風(fēng)機靜態(tài)特性都有相應(yīng)要求。文獻[3]中,在控制煉鐵所需高爐風(fēng)壓時,通過使用調(diào)節(jié)閥實現(xiàn)出口風(fēng)壓調(diào)節(jié),但該方法會增大管道阻力,損耗能量,降低風(fēng)機工作效率。文獻[4]在控制隧道通風(fēng)系統(tǒng)時,使用變頻調(diào)速的方法,但并未涉及到風(fēng)機與管道模型研究,未能得到管道出口壓力與電機轉(zhuǎn)速間精準的數(shù)學(xué)關(guān)系,調(diào)速范圍具有隨機性。文獻[5]提出了使用流量和輸出壓力作為反饋的控制方法,只是其控制對象是針對永磁電機的磁懸浮軸承間隙,控制范圍有限。傳統(tǒng)Greitzer模型未考慮實際應(yīng)用中由于地形限制而不可避免的彎形管道,并且存在限制使用地形的容腔,所以文獻[5]中所建立的模型并不適用。考慮風(fēng)機管道沿程壓力損失和局部壓力損失,能夠改進傳統(tǒng)Greitzer風(fēng)機模型,為風(fēng)壓閉環(huán)控制器的設(shè)計奠定基礎(chǔ)。筆者通過實驗得到了電機轉(zhuǎn)速與鼓風(fēng)機出口壓力間的關(guān)系,并驗證了模型的有效性和準確性。
1 系統(tǒng)數(shù)學(xué)模型
本研究對象為離心式鼓風(fēng)機,其主要結(jié)構(gòu)部件為葉輪、蝸殼和進出氣管道。驅(qū)動電機是30 kW高速磁懸浮永磁式電機,三維模型圖如圖1所示。
鼓風(fēng)機建模方面,最經(jīng)典的動態(tài)模型是由Greitzer[6]提出的,包含了風(fēng)機、管道和容腔。圖1所示的實驗對象相比圖2(a)所示的Greitzer經(jīng)典模型,并未包含對地形有要求的容腔,考慮了應(yīng)用價值極高的彎行管道,故模型更具有應(yīng)用普適性。

圖2 改進模型與原模型對比圖Fig.2 Comparison between improved model and original model
筆者在經(jīng)典風(fēng)機系統(tǒng)模型基礎(chǔ)上,針對包含彎管但不包含容腔的風(fēng)機管道,建立了一個僅以電機轉(zhuǎn)速作為控制量的數(shù)學(xué)模型,在建模時默認閥門保持不變。
1.1 鼓風(fēng)機升壓階段數(shù)學(xué)模型
對于圖2(b)中階段Ⅰ,外部氣體壓力為p01,經(jīng)過進氣管道進入鼓風(fēng)機后,鼓風(fēng)機對其做功,壓力升至p02,經(jīng)擴壓器輸出至出口管道,有如下關(guān)系
p02=ψc(ω,m)p01
(1)
其中:ω為電機轉(zhuǎn)速;m為氣體質(zhì)量流量;Ψc(ω,m)為鼓風(fēng)機特性函數(shù)。
1.1.1 鼓風(fēng)機特性函數(shù)模型
假定鼓風(fēng)機在對氣體做功過程中,與外界沒有熱交換,視其為等熵過程。對于理想氣體,在等熵過程中,根據(jù)文獻[7],有熱力學(xué)關(guān)系
其中:cp為恒壓條件下氣體比熱容;cv為恒容條件下氣體比熱容;κ=cp/cv,為絕熱指數(shù);T01為風(fēng)機入口溫度。
在氣體流經(jīng)鼓風(fēng)機過程中,氣體比焓增加來源于鼓風(fēng)機對氣體做功。考慮到該做功過程中的損耗,則可得以下關(guān)系
h02=h01+Δhideal-Δhloss
(4)
其中:h01為風(fēng)機入口處氣體比焓;h02為風(fēng)機出口處氣體比焓;Δhideal為風(fēng)機傳遞給氣流的理想比焓;Δhloss為風(fēng)機對氣流做功過程中所損失的比焓。
結(jié)合式(2~4),有
(5)
結(jié)合式(1,5),可以得到鼓風(fēng)機特性函數(shù)為
(6)
根據(jù)文獻[8],風(fēng)機傳遞給氣流理想比焓可由如下公式給出
(7)
1.1.2 鼓風(fēng)機內(nèi)氣體損耗模型
氣流經(jīng)鼓風(fēng)機從p01變化為p02的過程中,鼓風(fēng)機對氣流做功,會增加氣流比焓。但在該過程中,總會發(fā)生能量損耗,主要來自以下幾方面:a.氣流流入葉輪和擴散器時的沖擊損失Δhii和Δhdi;b.流經(jīng)葉輪和擴壓器時的表面摩擦損失Δhif和Δhdf;c.在葉輪處由于二次流導(dǎo)致的葉片負荷損失Δhbl。相比這3種損耗,其他損失可忽略不計,故本研究主要考慮這3種損失。
1) 沖擊損失。沖擊損失主要來源于氣體流入葉輪和擴壓器的過程中,為適應(yīng)葉輪方向而改變流向?qū)е碌乃俣葥p失。氣體在進入葉輪處的沖擊損失示意圖如圖3所示。
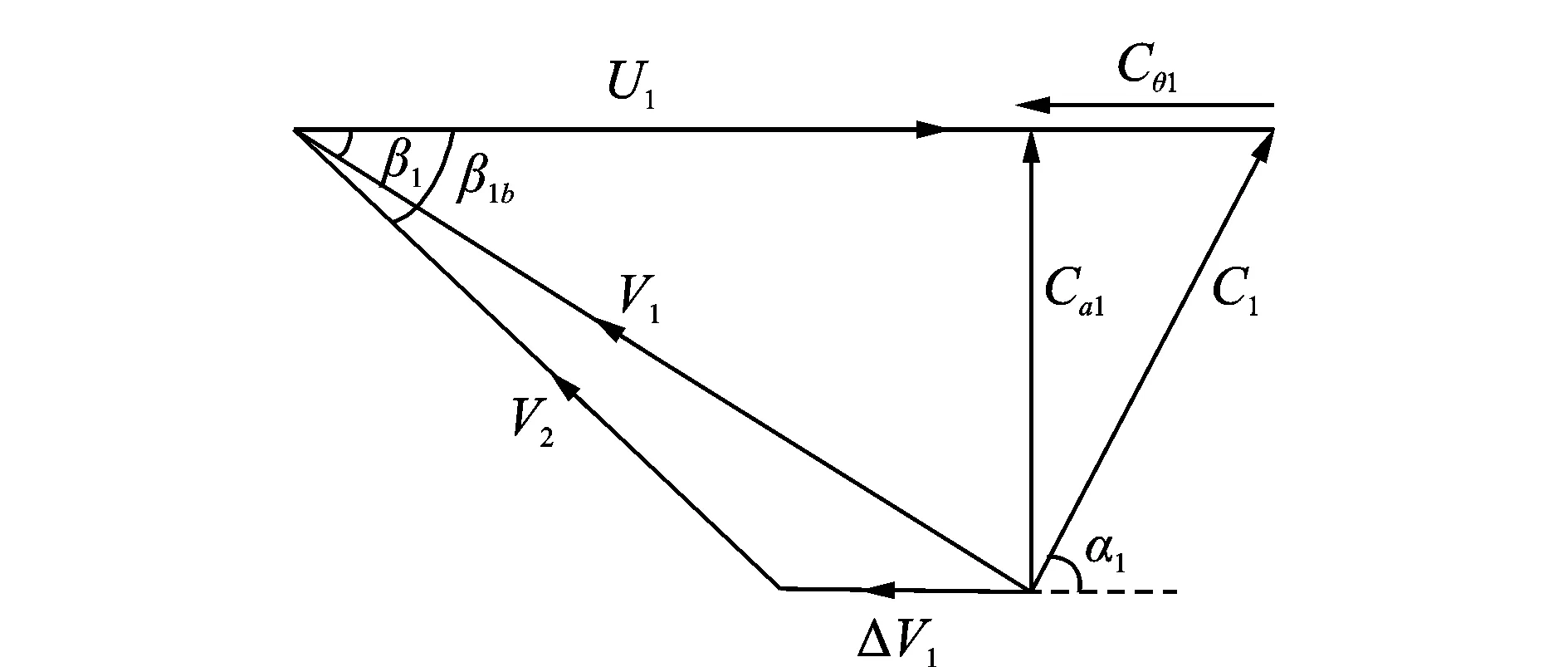
圖3 氣流進入葉片時沖擊損失Fig. 3 Incidence losses at the impeller
β1和V1分別為氣流進入葉輪時的角度和對葉片的相對速度,β1b為葉片角度,V2為氣流進入葉片后的相對速度,ΔV1即為氣流的相對速度損失
(8)
由正弦定理可得
(9)
由圖3可得
(10)
風(fēng)機葉輪為徑向式葉片結(jié)構(gòu),則α1=90°。對于管道內(nèi)氣體流速,有以下關(guān)系
v=m/ρ02A1
(11)
結(jié)合式(8~11)可得
(12)
其中:C1為氣體絕對流入速度;U1為葉輪入口處切向速度;β1b為氣流入口處葉片角度;ρ01為入口處氣體持續(xù)進氣密度;A1為進氣通道面積。
根據(jù)文獻[9],氣體在擴壓器處沖擊損失和摩擦損失與葉輪處相似。如圖4所示,氣體相對速度為V2,沿角度β2進入擴壓器,隨即改變速度方向至β2b以適應(yīng)擴壓器,在該過程中,其切向速度ΔV2的動能被損耗掉。
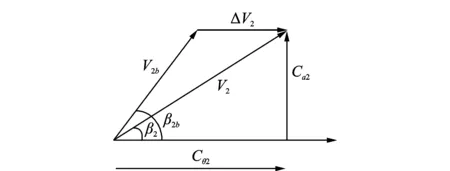
圖4 氣流進入擴壓器時沖擊損失示意圖Fig. 4 Incidence losses at the diffuer
與葉輪處沖擊損失Δhii求法同理,可求得擴壓器處氣體沖擊損失為
(13)
為簡化模型,根據(jù)文獻[9]可假定Ca2=Ca1,有
(14)
結(jié)合圖4中幾何關(guān)系與式(13),可得
(15)
其中:σ為滑移系數(shù),為出口處氣流切向速度與葉輪切向速度U2之比;β2b為葉片出口角度;D1為入口平均直徑;D2為出口平均直徑。
2) 表面摩擦損失。在氣體流經(jīng)葉輪和擴壓器時,氣流與葉輪壁和擴壓器壁間的摩擦?xí)?dǎo)致氣體表面摩擦損失。根據(jù)文獻[10],氣流在葉輪處的摩擦損失可定義如下
(16)
其中:l為流經(jīng)通道長度;D為管道水力直徑;f為摩擦因子,其取決于雷諾數(shù)Re。
圓形光滑管道Re可取2 500,此處選用布拉修斯公式計算摩擦因子,有如下關(guān)系
f=0.316 4/Re0.25
(17)
由式(16,17)可得,氣體在鼓風(fēng)機內(nèi)摩擦損失,獨立于電機轉(zhuǎn)速,而與流量的二次方成正比,故可簡化模型為
Δhfi=kfim2
(18)
氣流在流經(jīng)擴壓器時的摩擦損失模型,也可由相似方法建立[11],模型如下
Δhfd=kfdm2
(19)
其中:kfi,kfd分別為氣體在葉輪處和擴壓器處摩擦因數(shù)。
3) 葉片負荷損失。葉片負荷損失是由于葉片間壓力梯度造成氣流二次流而產(chǎn)生的[12]。二次流是流體在流動時,存在使其偏離主流流動方向的力(如重力、離心力等)或邊界條件(如彎管曲道或凹凸不平的邊壁),流體隨之產(chǎn)生的偏離主流流向的流動或偏移[13]。
葉片負荷損耗模型[14]可由如下公式給出
(20)
其中:Df為擴壓因子。
綜上可得,氣流流經(jīng)鼓風(fēng)機過程中,主要總損失Δhloss為
Δhloss=Δhii+Δhid+Δhfi+Δhfd+Δhbl
(21)
1.2 氣流沿直管流動階段數(shù)學(xué)模型
對于圖2(b)所示氣流沿直管流動階段Ⅱ,壓力為p02的氣體經(jīng)圓形直管道流動至彎管入口,在這個過程中,由于管道內(nèi)壁摩擦氣體會產(chǎn)生沿程壓力損失,故對于彎管入口時壓力為p03,有如下關(guān)系
(22)
其中:Lc為風(fēng)機出口到節(jié)流閥處管道的長度;ρ02為管道內(nèi)氣體密度;Δpλ為直管內(nèi)氣體沿程壓力損失;λ為沿程阻力系數(shù),通常取64/Re;v為管道內(nèi)氣體流速。
1.3 氣流沿彎管流動階段數(shù)學(xué)模型
對于圖2(b)所示氣流沿彎管流動階段Ⅲ,壓力為p03的氣體經(jīng)彎管改變流向經(jīng)出口管道輸出,相對在直行管道流動,彎管處氣體流經(jīng)距離較短,故忽略此處沿程壓力損失,其損失主要來自氣體經(jīng)彎管改變流向造成的局部壓力損失,輸出壓力為p,有如下關(guān)系
p=p03-Δpζ=p03-ζρ02v2/2
(23)
其中:Δpζ為彎管處局部壓力損失;ζ為局部阻力系數(shù)。
結(jié)合以上所推導(dǎo)模型公式,最終可得風(fēng)機管道系統(tǒng)出口輸出壓力與電機轉(zhuǎn)速和氣體質(zhì)量流量關(guān)系。系統(tǒng)模型如下
(24)
2 出口壓力控制策略
電機控制器主要由兩部分組成:在轉(zhuǎn)速小于6 kr/min時,調(diào)制方式為脈沖寬度調(diào)制(pulse width modulation,簡稱PWM),由DSP產(chǎn)生特定占空比的PWM波控制三相逆變器,從未改變定子相電壓;當(dāng)電機轉(zhuǎn)速大于6 kr/min時,調(diào)制方式為脈沖幅度調(diào)制(pulse amplitude modulation,簡稱PAM),通過調(diào)節(jié)可控硅整流器,改變母線電壓,實現(xiàn)電機調(diào)速目的。
在控制系統(tǒng)過工作時,給定所需壓力值,鼓風(fēng)機工作時,通過管道上的壓力、流量及溫度傳感器,由數(shù)據(jù)采集系統(tǒng)采得當(dāng)前狀態(tài)下鼓風(fēng)機狀態(tài)量,經(jīng)系統(tǒng)模型計算出當(dāng)前狀態(tài)下對應(yīng)的參考轉(zhuǎn)速,并將出口壓力與設(shè)定標準壓力值做差后經(jīng)過比例積分(proportional & integral,簡稱PI)控制器,控制器輸出結(jié)果疊加到計算所得參考轉(zhuǎn)速中,實現(xiàn)出口壓力閉環(huán)控制。參考轉(zhuǎn)速,經(jīng)轉(zhuǎn)速PI控制器,即可得到母線參考電壓U。通過控制器局域網(wǎng)絡(luò)(controller area network,簡稱CAN)通信,將參考電壓發(fā)送給三相可控硅觸發(fā)板,即可完成對可控硅導(dǎo)通角的控制。調(diào)節(jié)母線電壓,改變電機轉(zhuǎn)速,實現(xiàn)在不改變管道阻力情況下控制輸出口壓力。
系統(tǒng)控制方案框圖如圖5所示。
由圖中控制方案可得出,該控制策略穩(wěn)態(tài)精度取決于所建立風(fēng)機數(shù)學(xué)模型精準度,下面將通過實驗對風(fēng)機數(shù)學(xué)模型的準確性進行驗證。
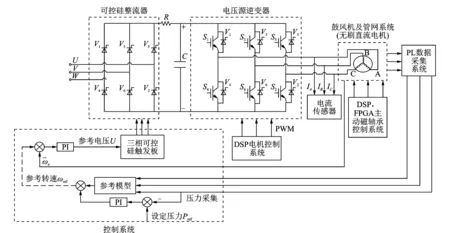
圖5 控制系統(tǒng)結(jié)構(gòu)圖Fig. 5 Control system
3 模型有效性實驗驗證
3.1 實驗平臺
本實驗平臺30 kW磁懸浮高速離心式鼓風(fēng)機如圖6所示,數(shù)據(jù)采集系統(tǒng)是基于西門子可編程邏輯控制器(programmable logic controller,簡稱PLC),型號為S7-200。采樣頻率為0.5 Hz。

圖6 實驗平臺Fig. 6 Experiment platform
3.2 實驗結(jié)果
對于式(24)中參數(shù),做如下取值:滑移系數(shù)σ取值與葉輪葉片數(shù)量相關(guān),取為0.875;擴壓器入口直徑D1為0.15 m,D2為0.25 m,定壓比熱容cp取為1.005 kJ/(kg·K),氣體絕熱指數(shù)κ取值為1.41;圓形光滑管道雷諾數(shù)取為2 500,故沿程阻力系數(shù)λ取為0.021 6,局部阻力系數(shù)ζ取為0.25;kfi,kdi為氣體摩擦常數(shù),與氣體速度平方正相關(guān),氣體速度可由式(11)利用其質(zhì)量流量計算得出。管道入口處溫度T0和氣體質(zhì)量流量m可由相應(yīng)數(shù)據(jù)采集器在實驗中采集,氣體密度取值為1.200 5 kg/m3;葉片入口與出口角度β2b和β2b分別為45°和41°;直管長度LC為5 m,管道直徑為0.25 m,可計算得相應(yīng)氣體流動橫截面積。
實驗時,控制電機轉(zhuǎn)速逐漸增加,從6 kr/min升至26 kr/min,轉(zhuǎn)速每變化200 r/min所采相應(yīng)的管道出口壓力數(shù)據(jù)求其均值后,最終得到100組數(shù)據(jù),計算改進模型與原模型在每組數(shù)據(jù)對應(yīng)轉(zhuǎn)速下的輸出壓力理論值,將理論計算所得曲線與實驗所測轉(zhuǎn)速壓力關(guān)系進行對比,結(jié)果如圖7所示。

圖7 不同模型壓力曲線對比圖Fig. 7 The relationship between rotor speed and outlet pressure for different model
計算兩個模型所得壓力與實驗壓力數(shù)據(jù)在各采樣點處相對誤差,結(jié)果如圖8所示。
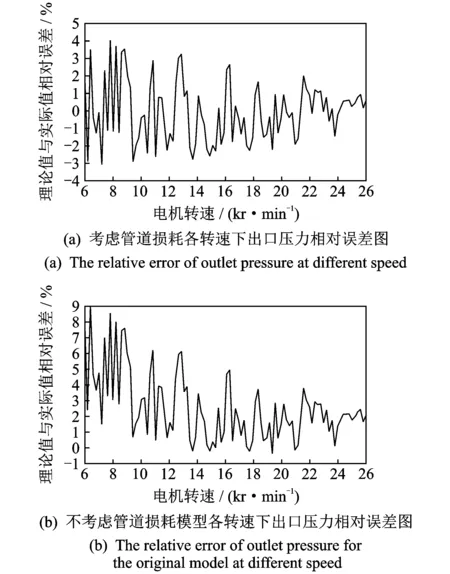
圖8 不同模型結(jié)果相對實驗壓力數(shù)據(jù)壓力誤差曲線圖Fig. 8 The relative error between model and experiment for different model
3.3 實驗結(jié)果分析
對于鼓風(fēng)機,可根據(jù)其輸出風(fēng)壓范圍將其分為低壓、中壓和高壓風(fēng)機。當(dāng)管道出口壓力(升壓)小于1 kPa時,為低壓風(fēng)機;大于1 kPa、小于3 kPa時,為中壓風(fēng)機;大于3 kPa時,為高壓風(fēng)機。由圖7分析可得,實驗所用鼓風(fēng)機,在電機轉(zhuǎn)速小于13 kr/min時,輸出壓力屬于低壓范圍;轉(zhuǎn)速大于13、小于23 kr/min時,輸出壓力處于中壓范圍;轉(zhuǎn)速大于23 kr/min時,輸出壓力屬于高壓范圍。
相比圖7(b),圖7(a)改進后的風(fēng)機系統(tǒng)模型,理論計算所得電機轉(zhuǎn)速-壓力關(guān)系曲線與實驗所得曲線整體重合度較好。由式(24)可知,管道內(nèi)壓力損失Δp與氣體質(zhì)量流量m二次方相關(guān),而m是與電機轉(zhuǎn)速ω正相關(guān)的,故當(dāng)轉(zhuǎn)速越大時,Δp越大,不考慮管道內(nèi)壓力損失的風(fēng)機模型計算所得理論曲線與通過實驗所得實際出口壓力-電機轉(zhuǎn)速關(guān)系曲線的偏差就會越大。在圖7(b)中,電機轉(zhuǎn)速大于13 kr/min,即鼓風(fēng)機管道出口壓力處于中高壓階段時,兩條曲線重合度較差,并且理論計算所得值會大于實際所測值。
由圖8分析可得,在鼓風(fēng)機輸出壓力為低壓,即電機轉(zhuǎn)速小于13 kr/min時,圖8(a)中,改進模型理論計算值與實驗所得值相對誤差范圍為±4%;而圖8(b)中,不考慮管道壓力損失的原模型相對誤差最高可達9%。在電機轉(zhuǎn)速大于13、小于23 kr/min,即鼓風(fēng)機輸出壓力處于中壓階段時,圖8(a)中改進模型對應(yīng)的理論與實驗值相對誤差為±3%;圖8(b)中初始模型對應(yīng)的初始模型,其相對誤差范圍為±5%。在電機轉(zhuǎn)速大于23 kr/min時,鼓風(fēng)機輸出壓力處于高壓階段,此時圖8(a)中改進模型對應(yīng)的相對誤差范圍為±1%;圖8(b)中初始模型的相對誤差范圍為±2.5%。
通過對圖8中相對誤差的比較分析可得,改進模型的精準度整體要高于初始模型,尤其在低速低壓輸出階段效果最好,能達到5%的優(yōu)化;在中高速階段,輸出壓力達到1 kPa以上時,此時雖然理論值與實驗值誤差增大,但由于輸出壓力升高,相對誤差反而變小,在中壓輸出階段,改進模型精度提高了±2%,在高壓輸出階段,精度提高了±1.5%。由此可得,改進模型在低壓輸出階段精度提升顯著,在中高壓輸出階段精準度也有明顯提升。
4 結(jié)束語
通過對Greitzer模型的改進,結(jié)合實際使用條件,去掉對使用環(huán)境要求高的容腔,增加應(yīng)用中不可避免的彎管,對于該種風(fēng)機管道,建立了一個考慮管道沿程壓力損失和局部壓力損失、以轉(zhuǎn)速作為控制量的數(shù)學(xué)模型,并通過實驗驗證了模型的有效性和準確性。經(jīng)計算比較得出,在輸出壓力為中壓和高壓階段,相比于實驗結(jié)果,所提改進模型輸出壓力相對誤差分別為±3%和±1%,而未考慮管道損耗的風(fēng)機模型這兩項誤差分別為±4%和±2%,均高于廠家的改進風(fēng)機管道模型,這證明改進風(fēng)機管道模型在精準性上有所提升。本研究所建立的模型,不僅可用于出口壓力控制,在需要控制特定輸出流量、對出口壓力要求精度不高的使用條件下,可以通過模型變換、建立電機轉(zhuǎn)速與出口流量的數(shù)學(xué)模型,完成出口流量控制,使模型具有較高的實用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
