基于毫米波雷達(dá)的自動(dòng)緊急剎車系統(tǒng)設(shè)計(jì)
2019-06-22 01:01:47阮海庭楊朝陽(yáng)殷春風(fēng)劉婷阮倩
汽車科技 2019年3期
關(guān)鍵詞:控制策略
阮海庭 楊朝陽(yáng) 殷春風(fēng) 劉婷 阮倩


摘? 要:設(shè)計(jì)了一種基于毫米波雷達(dá)的自動(dòng)緊急制動(dòng)(AEB)控制系統(tǒng),其能夠自動(dòng)檢測(cè)前方的障礙,并在緊急情況下發(fā)出預(yù)警信號(hào)提醒駕駛員制動(dòng)甚至主動(dòng)強(qiáng)制制動(dòng),保證駕駛員安全。基于ARS408-21毫米波雷達(dá),設(shè)計(jì)了上位機(jī)雷達(dá)標(biāo)定軟件用于配置、標(biāo)定雷達(dá)參數(shù)和獲取雷達(dá)檢測(cè)的目標(biāo)信息。基于MPC5748G微控制器設(shè)計(jì)了外圍電路系統(tǒng)板,作為AEB系統(tǒng)主控制器。制定了基于車速和碰撞時(shí)間的預(yù)警和緊急制動(dòng)策略。AEB系統(tǒng)的實(shí)車試驗(yàn)結(jié)果表明,系統(tǒng)功能符合設(shè)計(jì)要求,提升了汽車的主動(dòng)安全性能。
關(guān)鍵詞:毫米波雷達(dá);AEB;控制策略;汽車主動(dòng)安全
中圖分類號(hào):U463.5? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A? ? ? 文章編號(hào):1005-2550(2019)03-0037-04
Abstract: An automatic emergency braking (AEB) control system based on millimeter wave radar is designed, which can automatically detect obstacles in front and remind the driver to brake or even actively brake in an emergency to ensure the safety of drivers. Based on the ARS408-21 millimeter wave radar, the upper computer radar calibration software is designed to configure, calibrate the radar parameters and obtain the target information of the radar detection. Based on the MPC5748G microcontroller, the peripheral circuit board is designed as the main controller of the AEB system. Early warning and emergency braking strategies based on vehicle speed and collision time were developed. The vehicle test results of the AEB system show that the system function meets the design requirements and improves the active safety performance of the vehicle.
Key Words: Millimeter-wave radar; AEB; control strategy; automotive active safety
隨著汽車交通事故的日漸增多,2014年初,歐洲新車碰撞測(cè)試中心(E-NCAP)正式將自動(dòng)緊急制動(dòng)(AEB,Autonomous Emergency Braking)納入評(píng)分體系,作為對(duì)汽車安全等級(jí)的評(píng)價(jià)。資料顯示,AEB系統(tǒng)已經(jīng)被證實(shí)可以有效減少意外碰撞事故。在車速小于50km/h時(shí),安裝AEB系統(tǒng)的車輛可以減少38%的車輛追尾事故[1]。當(dāng)今,開發(fā)AEB系統(tǒng)的整車及零部件廠商越來越多,但不同車型存在較大差異。開發(fā)適合特定車輛的AEB控制系統(tǒng),對(duì)增加汽車的主動(dòng)安全性有重要的意義。
1? ? AEB系統(tǒng)設(shè)計(jì)
1.1? ?總體設(shè)計(jì)
整個(gè)AEB系統(tǒng)總體組成為:大陸公司ARS408-21毫米波雷達(dá)、NXP公司MPC5748G微控制器、制動(dòng)助力電機(jī)、Vector公司VN1610 CAN收發(fā)器、自主設(shè)計(jì)PC端雷達(dá)標(biāo)定軟件,實(shí)車驗(yàn)證時(shí)需接入車輛ECU(MPC5604B)。
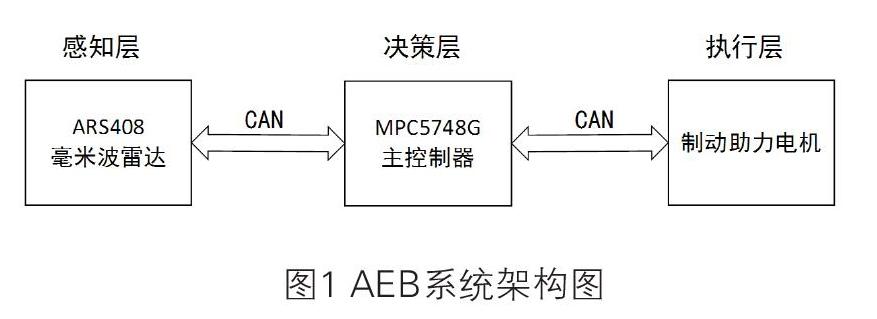
整個(gè)AEB系統(tǒng)架構(gòu)由感知層,決策層,執(zhí)行層三部分組成。
感知層,由ARS408-21毫米波雷達(dá)感知前方道路情況,并將前方物體信息通過CAN總線發(fā)送至決策層。
決策層,由MPC5748G微控制器根據(jù)感知層發(fā)送過來的信號(hào),通過特定控制策略,做出決策,將決策以CAN信號(hào)輸出至執(zhí)行層。
執(zhí)行層,由車輛ECU(MPC5604B)接收MPC5748G微控制發(fā)送的制動(dòng)CAN信號(hào),車輛ECU將CAN信號(hào)處理后轉(zhuǎn)發(fā)至制動(dòng)助力電機(jī)的驅(qū)動(dòng)器,驅(qū)動(dòng)器將CAN信號(hào)轉(zhuǎn)換為PWM信號(hào)驅(qū)動(dòng)制動(dòng)助力電機(jī),采用基于模型預(yù)測(cè)控制的制動(dòng)策略執(zhí)行制動(dòng)操作。
其中,Vector VN1610 CAN 接口主要用于建立雷達(dá)與PC機(jī)之間的連接,用來傳輸指令與數(shù)據(jù),設(shè)置雷達(dá)參數(shù),監(jiān)控雷達(dá)數(shù)據(jù)。
1.2? ?硬件選型和設(shè)計(jì)
硬件方面,選用NXP 公司MPC5748G芯片及自主設(shè)計(jì)的外圍電路和系統(tǒng)板作為AEB系統(tǒng)的主控制器。MPC5748G微控制器含三個(gè)處理器內(nèi)核,時(shí)鐘頻率高,運(yùn)算速度快,滿足對(duì)雷達(dá)信息及時(shí)采集和處理的要求,有多路CAN、LIN、FlexRay收發(fā)接口,滿足多路通訊要求,適合作為AEB主控制器[2]。圖2為MPC5748G系統(tǒng)板硬件圖。
選用大陸公司ARS408-21毫米波雷達(dá)作為信號(hào)采集硬件。圖3為ARS408-21硬件圖。ARS408-21采用快斜率FMCW(調(diào)頻連續(xù)波)調(diào)頻方式,在一個(gè)測(cè)量周期內(nèi)可以獨(dú)立的測(cè)量目標(biāo)橫向和縱向的速度和距離,雷達(dá)的實(shí)時(shí)刷新頻率為17Hz。ARS408可在短時(shí)間內(nèi)探測(cè)250m以內(nèi)的目標(biāo),并能同時(shí)分辨多個(gè)目標(biāo)的相對(duì)速度與角度,且可以連續(xù)跟蹤多個(gè)物體[3]。圖4為ARS408-21雷達(dá)掃描范圍和距離關(guān)系圖。
1.3? ?軟件設(shè)計(jì)
雷達(dá)標(biāo)定軟件基于Microsoft Visual Studio 2013集成開發(fā)工具進(jìn)行開發(fā)。根據(jù)ARS408-21官方接口文檔,及Vector VN1610官方接口文檔[4],設(shè)計(jì)C#程序界面,圖5為雷達(dá)標(biāo)定軟件雷達(dá)設(shè)置界面圖。編寫后臺(tái)程序,驅(qū)動(dòng)Vector VN1610設(shè)備,設(shè)計(jì)主進(jìn)程和CAN總線收發(fā)報(bào)文解析等線程,實(shí)現(xiàn)雷達(dá)數(shù)據(jù)顯示,雷達(dá)設(shè)置,雷達(dá)過濾器設(shè)置,檢測(cè)區(qū)設(shè)置,雷達(dá)數(shù)據(jù)保存等功能。通過設(shè)計(jì)的雷達(dá)標(biāo)定系統(tǒng),調(diào)試和配置雷達(dá)的各項(xiàng)參數(shù)。
AEB系統(tǒng)主控制器MPC5748G的軟件架構(gòu)為:微控制器,底層驅(qū)動(dòng),復(fù)雜驅(qū)動(dòng),中間層和應(yīng)用層。圖6為AEB主控制器軟件架構(gòu)圖。
底層和中間層相關(guān)驅(qū)動(dòng)程序相關(guān)程序通過S32 Design Studio for Power Architecture軟件開發(fā)。主要完成系統(tǒng)時(shí)鐘配置,中斷配置,IO配置,PWM配置,CAN收發(fā)和緩沖區(qū)配置。
中間層主要完成底層接口與應(yīng)用層接口的對(duì)接,主要是CAN協(xié)議、XCP和UDS協(xié)議集成。
應(yīng)用層即AEB控制策略,使用Matlab軟件開發(fā)。通過Matlab/ Simulink模型,實(shí)現(xiàn)雷達(dá)報(bào)文解析,雷達(dá)控制策略,輸出預(yù)警和制動(dòng)信號(hào)到執(zhí)行器。對(duì)搭建完成的模型進(jìn)行參數(shù)關(guān)聯(lián),數(shù)據(jù)管理等配置后,生成嵌入式代碼和標(biāo)定A2L文件[5]。
MPC5748G通過CAN總線接收雷達(dá)濾波處理后的數(shù)據(jù)結(jié)果,獲取障礙物的橫縱向速度、距離,運(yùn)動(dòng)狀態(tài)等信息,根據(jù)這些信息通過控制策略,給出不同的處理信號(hào)到執(zhí)行器。其中,預(yù)警信號(hào)由MPC5748G發(fā)出的不同頻率的PWM波驅(qū)動(dòng)外接蜂鳴器發(fā)出,制動(dòng)信號(hào)由CAN報(bào)文發(fā)送至車輛ECU,車輛ECU驅(qū)動(dòng)制動(dòng)機(jī)構(gòu)制動(dòng)。圖7為MPC5748G控制器主程序流程圖。
2? ? AEB控制策略設(shè)計(jì)與實(shí)驗(yàn)
2.1? ?AEB控制策略設(shè)計(jì)
AEB控制策略通過Matlab/ Simulink設(shè)計(jì),設(shè)計(jì)思路基于TTC計(jì)算控制預(yù)警信號(hào)和制動(dòng)信號(hào)的發(fā)出時(shí)間。TTC(time to collision)定義:假設(shè)自車和前車以當(dāng)前車速繼續(xù)前進(jìn),在經(jīng)過TTC時(shí)間之后將會(huì)發(fā)生碰撞[6]。
對(duì)于縱向運(yùn)動(dòng)障礙物,根據(jù)縱向距離DistLong和縱向相對(duì)速度VrelLong,計(jì)算TTC。
對(duì)于橫向穿越運(yùn)動(dòng)障礙物,根據(jù)橫向距離DistLat和橫向相對(duì)速度VrelLat,考慮車寬,計(jì)算TTC。
對(duì)于縱向運(yùn)動(dòng)且橫向穿越障礙物,縱向距離DistLong和縱向相對(duì)速度VrelLong,橫向距離DistLat和橫向相對(duì)速度VrelLat,計(jì)算TTC[7]。
根據(jù)汽車AEB行業(yè)大量實(shí)驗(yàn)數(shù)據(jù),通過使用Matlab進(jìn)行曲線擬合,得到制動(dòng)時(shí)車速v與制動(dòng)預(yù)警信號(hào)Ty之間存在下列關(guān)系
得到制動(dòng)時(shí)車速v與強(qiáng)制制動(dòng)信號(hào)Tz之間存在下列關(guān)系
實(shí)車測(cè)試階段主要采用40km/h工況,代入公式計(jì)算,得1.8s內(nèi)可能碰撞時(shí)給出預(yù)警信號(hào),0.8s內(nèi)可能碰撞時(shí)給出制動(dòng)信號(hào)。考慮到各車型制動(dòng)最大減速度,和制動(dòng)器起壓時(shí)間差異,為保證實(shí)驗(yàn)安全起見,前期采用計(jì)算結(jié)果提前0.5s作為控制參數(shù),即2.3s內(nèi)發(fā)出預(yù)警信號(hào),1.3s內(nèi)強(qiáng)制制動(dòng)。后期再通過標(biāo)定優(yōu)化,確定最優(yōu)參數(shù)。圖8為控制策略程序流程圖。
2.2? ?實(shí)車測(cè)試實(shí)驗(yàn)
實(shí)車測(cè)試所用車輛為東風(fēng)E30,通過車上配備低壓蓄電池(12V)給雷達(dá)供電和MPC5748G AEB控制器。雷達(dá)安裝與車輛前方中心位置(如圖8中紅色標(biāo)記)。AEB控制器通過CAN總線與車輛ECU(MPC5604B)建立連接。CAN通訊速率設(shè)置為500kB/s。AEB控制器從車輛ECU獲取車速等車輛信息,同時(shí)也發(fā)送制動(dòng)信號(hào)給ECU,ECU驅(qū)動(dòng)制動(dòng)助力電機(jī)進(jìn)行緊急制動(dòng)。預(yù)警信號(hào)由MPC5748G控制器連接的蜂鳴器產(chǎn)生。
實(shí)驗(yàn)表明,車速40km/h工況下,系統(tǒng)能在2.3s內(nèi)發(fā)出預(yù)警信號(hào)提示駕駛員制動(dòng),1.3s內(nèi)主動(dòng)緊急制動(dòng),滿足設(shè)計(jì)要求。
3? ?結(jié)論
1)設(shè)計(jì)的AEB主控制器的硬件電路,以及雷達(dá)標(biāo)定上位機(jī)軟件都能正常工作,滿足要求,具有擴(kuò)展性。
2)基于TTC的AEB控制策略,預(yù)警制動(dòng)準(zhǔn)確率93.7%。復(fù)雜情況下,由于雷達(dá)信號(hào)干擾存在誤報(bào)情況。
3)整個(gè)AEB控制系統(tǒng)有效、可用,能很大程度上避免駕駛員的駕駛失誤造成的交通事故,提高汽車主動(dòng)安全性,具有工程價(jià)值。
在今后的研究中要在實(shí)車測(cè)試標(biāo)定環(huán)節(jié)多考慮車輛實(shí)際可能遇到的各種工況和道路、天氣條件,逐一分類優(yōu)化控制策略和控制參數(shù),滿足產(chǎn)品級(jí)要求。
參考文獻(xiàn):
[1]Fildes B, Keall M, Bos N, et al. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes.[J]. Accident; analysis and prevention. 2015, 81: 24.
[2]MPC5748G Reference Manual Version 5, 2016.
[3]ARS40X_Technical_Documentation Version 1.91, 2018.
[4]Vector XL Driver Library Description Version 9.7, 2016.
[5]陳攀,張承瑞,羅映.利用MATLAB/RTW的嵌入式代碼自動(dòng)生成與整合[J].小型微型計(jì)算機(jī)系統(tǒng),2018,39(04):738-741.
[6]Murata E, Usui T, Nogi K, et al. Study on TTC Distribution when Approaching a Lead Vehicle[C]SAE 2016 World Congress and Exhibition.2016.
[7]余志生.汽車?yán)碚?第5版[M].機(jī)械工業(yè)出版社,2009.
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36