基于RBF的金屬殼諧振陀螺溫度誤差補(bǔ)償方法
2019-06-20 06:07:39劉寧馬曉飛蘇中
現(xiàn)代電子技術(shù) 2019年10期
劉寧 馬曉飛 蘇中
摘 ?要: 針對金屬殼諧振陀螺由于溫度變化導(dǎo)致陀螺精度降低的問題,提出一種基于RBF神經(jīng)網(wǎng)絡(luò)的金屬殼諧振陀螺溫度誤差補(bǔ)償方法。在-4~60 ℃溫度范圍內(nèi),分別建立金屬殼諧振陀螺的溫度誤差一階多項式模型、二階多項式模型和RBF神經(jīng)網(wǎng)絡(luò)模型,基于三種溫度誤差模型對陀螺輸出進(jìn)行溫度誤差補(bǔ)償。實驗數(shù)據(jù)表明,基于RBF神經(jīng)網(wǎng)絡(luò)模型的補(bǔ)償效果優(yōu)于基于一階多項式和二階多項式模型的補(bǔ)償效果,補(bǔ)償后漂移標(biāo)準(zhǔn)差減少了66.31%,可大幅度降低溫度變化對金屬殼諧振陀螺精度的影響,在工程實際中有一定參考意義。
關(guān)鍵詞: 金屬殼諧振陀螺; 溫度漂移; 溫度誤差補(bǔ)償; RBF神經(jīng)網(wǎng)絡(luò); 多項式模型; 漂移標(biāo)準(zhǔn)差
中圖分類號: TN37+3?34; V241.5 ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識碼: A ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2019)10?0049?04
Temperature error compensation method based on RBF for metal shell syntonic gyro
LIU Ning1, MA Xiaofei2, SU Zhong1
(1. Beijing Key Laboratory of High Dynamic Navigation Technology, Beijing Information Science & Technology University, Beijing 100101, China;
2. Beijing Institute of Control and Electronics Technology, Beijing 100101, China)
Abstract: A temperature error compensation method based on RBF neural network is proposed for the metal shell syntonic gyro to solve the metal shell syntonic gyro accuracy reduction problem caused by the temperature variation. The first?order polynomial model, second?order polynomial model and RBF neural network model are established respectively in the temperature range of –4~60 ℃ for the temperature errors of the metal shell syntonic gyro. The temperature error compensation is conducted for the gyros output on the basis of three temperature error models. The experimental data shows that the compensation effect of the RBF neural network model is superior to that of the first?order polynomial model and second?order polynomial model; the drift standard deviation after compensation is reduced by 66.31%; the method can significantly decrease the influence of temperature variation on the accuracy of the metal shell syntonic gyro, and has a certain reference value in the engineering practice.
Keywords: metal shell syntonic gyro; temperature drift; temperature error compensation; RBF neural network; polynomial model; drift standard deviation
金屬殼諧振陀螺是以金屬諧振子作為敏感構(gòu)件的一種哥氏振動陀螺。其不僅具有傳統(tǒng)固體振動陀螺低成本、低功耗、長壽命、高靈敏度的優(yōu)點,而且還具有結(jié)構(gòu)簡單、抗沖擊能力強(qiáng)的特點,在兼顧抗過載、量程和精度上表現(xiàn)出了巨大的潛力[1?2],能夠更好地應(yīng)用在中低精度角速率測量領(lǐng)域[3]。近年來,金屬殼諧振陀螺廣泛應(yīng)用于航天、航空、航海等領(lǐng)域。
金屬殼諧振陀螺的諧振子由合金材料制成,由于金屬材料本身具有較大的溫度系數(shù)和熱膨脹系數(shù),受環(huán)境溫度變化影響明顯[4]。因此,金屬殼諧振陀螺對溫度非常敏感。當(dāng)環(huán)境溫度發(fā)生變化時,陀螺的零位漂移明顯加劇,陀螺精度大幅下降。因此,對金屬殼諧振陀螺的溫度特性進(jìn)行研究,建立陀螺漂移?溫度模型,并利用該模型對陀螺輸出進(jìn)行補(bǔ)償,對于提高陀螺精度有決定性的意義。傳統(tǒng)的方法是通過統(tǒng)計方法、模糊算法等手段建立陀螺的近似溫度模型,再通過溫度傳感器測量當(dāng)前陀螺溫度,估算補(bǔ)償量進(jìn)行溫度補(bǔ)償[5?6]。文獻(xiàn)[7]提出一種無溫度傳感器的數(shù)字溫度補(bǔ)償方案,削弱了溫度對金屬振動陀螺輸出的影響,提高了陀螺漂移等性能指標(biāo)。文獻(xiàn)[8]利用2階最小二乘方法對金屬殼諧振陀螺進(jìn)行溫度零位補(bǔ)償。傳統(tǒng)金屬殼諧振陀螺在全溫區(qū)內(nèi)對陀螺溫度誤差進(jìn)行補(bǔ)償時,陀螺零偏隨溫度變化的非線性特點難以得到準(zhǔn)確表達(dá),溫度誤差補(bǔ)償效果不理想。本文通過對金屬殼諧振陀螺溫度誤差機(jī)理進(jìn)行分析,對金屬殼諧振陀螺溫度誤差補(bǔ)償方法進(jìn)行研究,分別采用一階多項式模型、二階多項式模型、RBF神經(jīng)網(wǎng)絡(luò)模型對金屬殼諧振陀螺溫度誤差進(jìn)行補(bǔ)償,經(jīng)實驗驗證,RBF神經(jīng)網(wǎng)絡(luò)建模補(bǔ)償效果優(yōu)于一階多項式模型和二階多項式模型,表明了RBF神經(jīng)網(wǎng)絡(luò)模型在金屬殼諧振陀螺溫度誤差補(bǔ)償應(yīng)用中的有效性。
1 ?溫度誤差機(jī)理分析
在材料彈性模量變化和熱應(yīng)力作用下,金屬諧振子剛度隨溫度變化的關(guān)系可表示為[9]:
[K=K0[1+(kt+λσaE0)(T-T0)]] (1)
式中:[K],[K0]分別為諧振子在溫度[T],[T0]時的剛度;[kt]為彈性模量隨溫度變化的系數(shù);[λσ]為熱應(yīng)力引起的諧振子剛度變化的比例系數(shù);[a]為熱膨脹系數(shù);[E0]為諧振子材料在溫度[T0]時的彈性模量。由此可得,金屬諧振子的諧振頻率與溫度的關(guān)系[10]為:
[f(T)=Km ? ? ? ? ?=K0[1+(kt+λσaE0)(T-T0)]m ? ? ? ? ?=f01+(kt+λσaE0)(T-T0)] (2)
式中,[f(T)],[f0]分別為諧振子在溫度[T],[T0]時的諧振頻率。
由此可知,當(dāng)溫度發(fā)生變化時,由于金屬諧振子的諧振頻率發(fā)生變化,金屬殼諧振陀螺的輸出精度降低。
2 ?多項式模型
多項式模型是基于最小二乘法的線性回歸模型,陀螺零偏?溫度的多項式模型可表示為:
[B0=a0+a1T+a2T2+…+anTn] ?(3)
式中:[B0]為陀螺零偏;[T]為環(huán)境溫度;[a0],[a1],[a2],…,[an]為擬合系數(shù),可通過最小二乘法擬合確定。
傳統(tǒng)金屬殼諧振陀螺進(jìn)行溫度誤差補(bǔ)償時多使用一階多項式模型和二階多項式模型分別如下:
[B0=a0+a1T] ? ?(4)
[B0=a0+a1T+a2T2] ?(5)
3 ?RBF神經(jīng)網(wǎng)絡(luò)模型
人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network,ANN)是由處理單元廣泛互聯(lián)而成的網(wǎng)絡(luò),具有強(qiáng)大的非線性映射能力,因其獨(dú)特的信息處理能力在模式識別、信息處理、系統(tǒng)建模等領(lǐng)域得到廣泛應(yīng)用。其中,RBF神經(jīng)網(wǎng)絡(luò)具有良好的逼近任意非線性函數(shù)和表達(dá)系統(tǒng)內(nèi)在的難以解析的規(guī)律性的能力,且有極快的學(xué)習(xí)收斂速度。
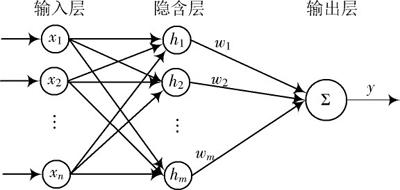
RBF神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示,它是一種三層前饋網(wǎng)絡(luò):第一層為輸入層,由信號源節(jié)點組成;第二層為隱含層,隱單元數(shù)視所描述問題的需要而定,隱單元的變換函數(shù)RBF是對稱中心徑向?qū)ΨQ且衰減的非線性函數(shù);第三層為輸出層,對輸入模式的作用做出響應(yīng)。
圖1 ?RBF神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)結(jié)構(gòu)
在RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)中,[X=[x1,x2,…,xn]T]為網(wǎng)絡(luò)的輸入向量,[H=[h1,h2,…,hm]T]為徑向基向量,其中[hj]為高斯基函數(shù):
[hj=exp-X-Cj22b2j, ? j=1,2,…,m] ? (6)
式中:[·]表示歐氏范數(shù);Cj=[cj1,cj2,…,cjm]T為網(wǎng)絡(luò)第j個節(jié)點的中心矢量;網(wǎng)絡(luò)的基寬向量為B=[b1,b2,…,bm]T,bj為節(jié)點的基寬帶參數(shù),且大于零。設(shè)網(wǎng)絡(luò)的權(quán)向量為W=[w1,w2,…,wm],則RBF神經(jīng)網(wǎng)絡(luò)的輸出值為:
[y=WH=w1h1+w2h2+…+wmhm] (7)
4 ?實驗及分析
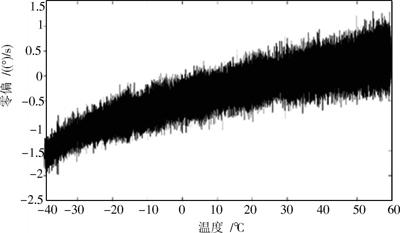
將金屬殼諧振陀螺置于溫度試驗箱內(nèi),設(shè)置溫度試驗箱的溫度范圍為-40~60 ℃,以10 ℃/h的速度進(jìn)行升溫和降溫,在溫度區(qū)間內(nèi)對陀螺輸出進(jìn)行采樣,采樣頻率200 Hz。數(shù)據(jù)采集結(jié)束后,得到陀螺原始零偏?溫度關(guān)系如圖2所示。
圖2 ?陀螺原始零偏?溫度關(guān)系
由于陀螺零偏原始數(shù)據(jù)中樣本組數(shù)過多,不宜直接進(jìn)行零偏和溫度的擬合。為提高擬合速率和降低測試誤差,在陀螺零偏原始數(shù)據(jù)基礎(chǔ)上,-40~60 ℃溫度區(qū)間內(nèi),以0.1 ℃為間隔取點,在每個溫度點上取前后100個樣本的平均值作為該溫度點的陀螺零偏,得到新樣本的零偏?溫度關(guān)系如圖3所示。
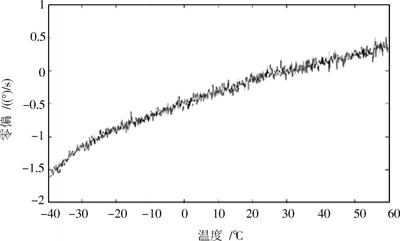
圖3 ?陀螺新樣本零偏?溫度關(guān)系
基于多項式模型,使用最小二乘法對陀螺零偏?溫度新樣本擬合,得到零偏隨溫度變化的一階多項式模型:
[B0=-0.565+0.017 6T] ? (8)
二階多項式模型:
[B0=-0.491 1+0.019 8T-0.000 1T2] ? (9)
基于一階多項式模型得到的陀螺新樣本擬合曲線見圖4,基于二階多項式模型得到的曲線見圖5。將陀螺零偏?溫度新樣本作為學(xué)習(xí)樣本進(jìn)行訓(xùn)練,基于RBF神經(jīng)網(wǎng)絡(luò)模型得到的陀螺新樣本擬合曲線如圖6所示。
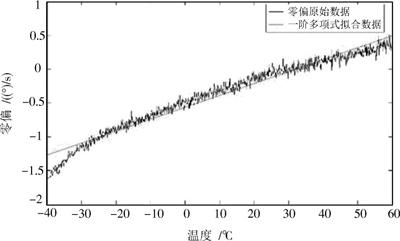
圖4 ?一階多項式模型擬合曲線
由擬合曲線可看出,基于一階多項式模型得到的擬合效果最差,基于RBF神經(jīng)網(wǎng)絡(luò)模型的擬合效果最優(yōu)。利用上述三種模型對陀螺零偏原始數(shù)據(jù)進(jìn)行補(bǔ)償,補(bǔ)償效果分別如圖7~圖9所示。
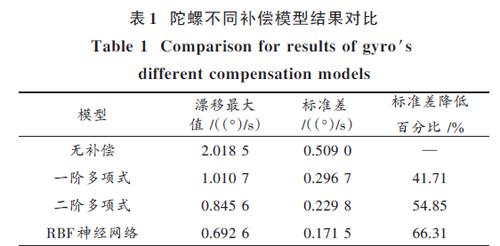
對基于三種模型補(bǔ)償?shù)耐勇萘闫珨?shù)據(jù)進(jìn)行分析比較,比較結(jié)果見表1。可以看出,基于一階多項式模型、二階多項式模型和RBF神經(jīng)網(wǎng)絡(luò)模型對金屬殼諧振陀螺進(jìn)行溫度誤差補(bǔ)償后,陀螺的溫度漂移得到了抑制,在-40~60 ℃的溫度區(qū)間內(nèi)的漂移標(biāo)準(zhǔn)差大幅降低,補(bǔ)償效果明顯。基于RBF神經(jīng)網(wǎng)絡(luò)模型的補(bǔ)償效果最好,補(bǔ)償后,陀螺漂移最大值降低到0.692 6 (°)/s,標(biāo)準(zhǔn)差降低了66.31%。
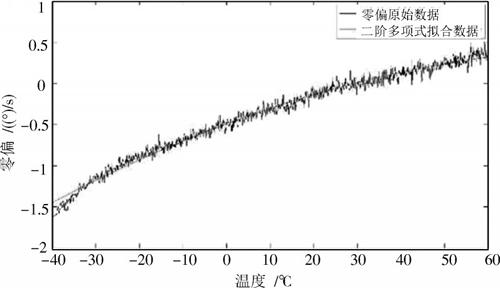
圖5 ?二階多項式模型擬合曲線
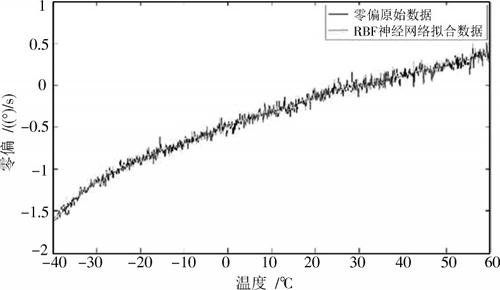
圖6 ?RBF神經(jīng)網(wǎng)絡(luò)模型擬合曲線
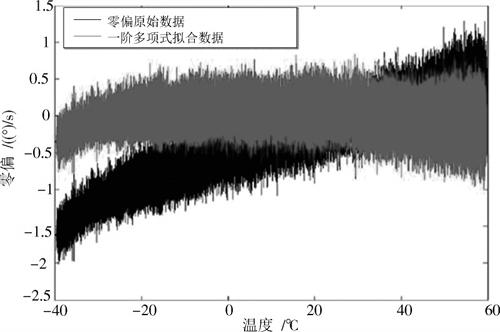
圖7 ?一階多項式模型補(bǔ)償效果
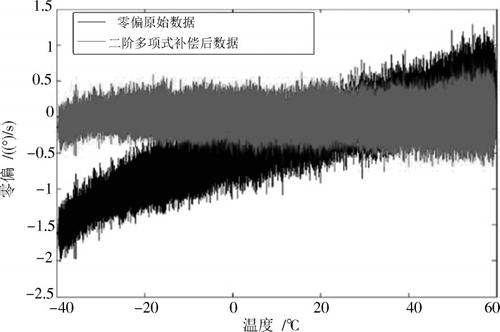
圖8 ?二階多項式模型補(bǔ)償效果
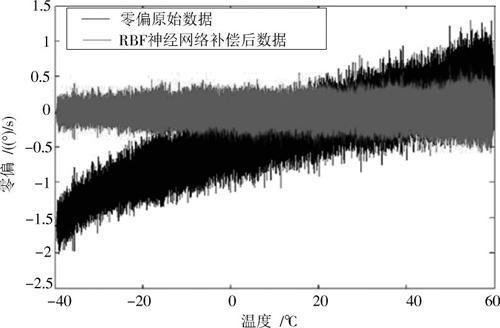
圖9 ?RBF神經(jīng)網(wǎng)絡(luò)模型補(bǔ)償效果
5 ?結(jié) ?論
本文分析了金屬殼諧振陀螺的溫度誤差機(jī)理,結(jié)合溫度實驗,建立金屬殼諧振陀螺溫度誤差的一階多項式模型、二階多項式模型和RBF神經(jīng)網(wǎng)絡(luò)模型,并基于誤差模型對陀螺輸出零偏進(jìn)行溫度誤差補(bǔ)償。仿真表明,基于RBF神經(jīng)網(wǎng)絡(luò)模型的補(bǔ)償效果優(yōu)于一階多項式和二階多項式模型的補(bǔ)償效果,補(bǔ)償后的陀螺輸出精度顯著提高,補(bǔ)償效果明顯,具有一定的工程應(yīng)用價值。
參考文獻(xiàn)
[1] 謝笛.杯形波動陀螺數(shù)字化測控技術(shù)研究[D].長沙:國防科技大學(xué),2011.
XIE Di. The study on cupped wave gyro digital measurement and control technology [D]. Changsha: National University of Defense Technology, 2011.
[2] ARMENISE M N, CIMINELLI C, DELL′OLIO F, et al. Advances in gyroscope technologies [M]. Berlin: Springer, 2013.
[3] KRISTIANSEN D. Modeling of cylinder gyroscopes and observer design for nonlinear oscillations [D]. Norway: Norwegian University of Science and Technology, 2000.
[4] LELAND R P. Adaptive tuning for vibrational gyroscopes [C]// Proceedings of the 40th IEEE Conference on Decision and Control. Orlando: IEEE, 2001: 3447?3452.
[5] BATUR C, SREERAMREDDY T, KHASAWNEH Q. Sliding mode control of a simulated MEMS gyroscope [C]// Proceedings of the American Control Conference. Portland: IEEE, 2005: 4160?4165.
[6] FEI J, DING H. Adaptive sliding mode control of dynamic system using RBF neural network [J]. Nonlinear dynamics, 2012, 70(2): 1563?1573.
[7] LIU N, SU Z, LI Q. Design and experiment of a novel bell?shaped vibratory gyro [J]. Sensors and actuators A: physical, 2016, 238: 37?50.
[8] SHATALOV M Y, LUNIN B S. Vibratory gyroscopes: identification of mathematical model from test data [C]// Proceedings of 14th International Conference on Integrated Navigational Systems. St. Petersburg: [S.l.], 2007: 1?6.
[9] SU Z, LIU N, LI Q, et al. Research on the signal process of a bell?shaped vibratory angular rate gyro [J]. Sensors, 2014, 14(3): 5254?5277.
[10] 嚴(yán)恭敏,李四海,秦永元.慣性儀器測試與數(shù)據(jù)分析[M].北京:國防工業(yè)出版社,2012.
YAN Gongmin, LI Sihai, QIN Yongyuan. Inertial device test and data analysis [M]. Beijing: National Defense Industry Press, 2012.
